Всех приветствую, сегодняшняя статья будет целиком и полностью посвящена обзору протокола CAN. А в одной из следующих статей мы реализуем обмен данными по CAN на практике. Но не буду забегать вперед…
CAN (Controller Area Network) — это промышленный стандарт, позволяющий осуществить объединение в единую сеть различных узлов, механизмов, датчиков и т. п. Протокол является широковещательным, это значит, что все устройства в CAN-сети принимают все передаваемые по шине сигналы. Режим передачи данных — последовательный, при этом байты сообщений формируют кадры определенного вида. Структуру этих кадров данных мы также обязательно разберем в этой статье.
Основные характеристики протокола CAN:
- очень высокая надежность и защищенность
- каждое сообщение имеет свой собственный приоритет
- реализован механизм обнаружения ошибок
- автоматическая повторная отправка сообщений, которые были доставлены с ошибкой
- уже упомянутый широковещательный характер передачи данных
- возможность присутствия нескольких ведущих (master) устройств в одной сети
- широкий диапазон скоростей работы
- высокая устойчивость интерфейса к помехам
- кроме того, есть механизм обнаружения «сбойных» узлов с последующим удалением таких узлов из сети.
Первоначально стандарт был разработан для автомобильной промышленности. И занималась этим компания Bosch в 1980-х годах. Основная идея заключалась в том, чтобы уйти от использования огромного количества проводов, соединяющих многочисленные узлы автомобиля. И протокол CAN позволил этого достичь. С тех пор CAN является основным механизмом соединения устройств, узлов и датчиков автомобиля между собой. Помимо этого, интерфейс CAN активно используется в промышленной автоматизации, а также в системах «умного дома».
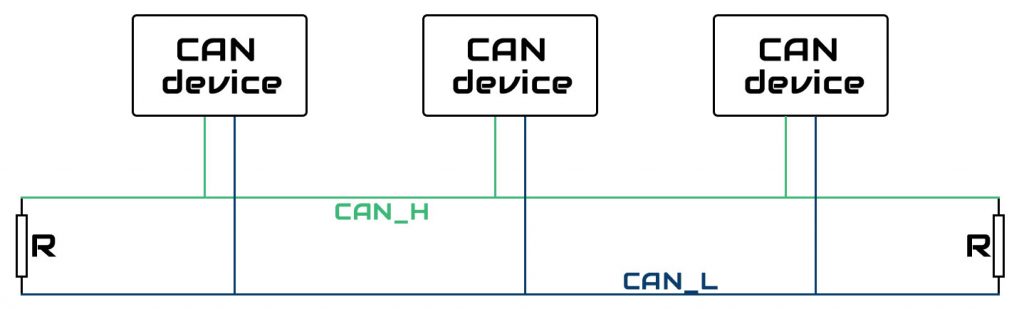
Давайте перейдем к физическому уровню протокола. В интернете можно найти много противоречивой информации на этот счет, но истина тут одна ) Стандарт CAN компании Bosch не регламентирует физический уровень передачи данных, поэтому могут использоваться абсолютно разные варианты, например, оптоволокно. На практике же чаще всего используется соединение посредством двухпроводной дифференциальной линии (витой пары). Ориентировочная максимальная длина линии для разных скоростей передачи данных составляет:
| Скорость | Длина линии |
|---|---|
| 1 Мбит/с | 50 м |
| 500 кбит/с | 100 м |
| 125 кбит/с | 500 м |
| 10 кбит/с | 5 км |
Важным условием работоспособности шины является наличие на концах витой пары согласующих резисторов, которые также называют терминаторами, с сопротивлением 120 Ом:
В отличие от многих других протоколов в CAN не рекомендуется описание битов данных как «логического нуля» и «логической единицы». Здесь используются понятия доминантный и рецессивный бит.
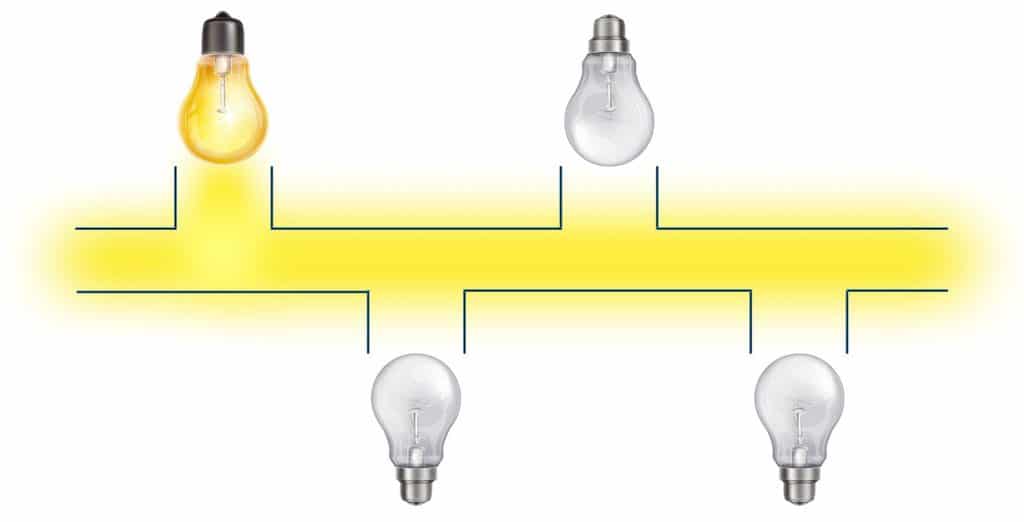
Важнейшим свойством является то, что если один из узлов сети хочет выставить на линии рецессивный бит, а другой доминантный, то в итоге на линии окажется доминантный бит. В общем-то отсюда и следует его название, от слова «доминировать» ) Очень хорошо этот процесс иллюстрирует пример с оптоволоконной линией. Как вы помните, в оптоволокне для передачи данных используется «свет», либо он есть (единица), либо его нет (ноль). При использовании в CAN-сети «свет» — доминантный бит, соответственно, отсутствие света или «темнота» — рецессивный.
Вспоминаем про важнейшее свойство передачи данных в сети. Пусть один узел выставляет на линии рецессивный бит, то есть «темноту». Второй узел, напротив, выставляет доминантный бит — «свет». В итоге на линии будет «свет», то есть доминантный бит, что в точности соответствует требованиям сети:
При использовании электрического сигнала устройство, желающее передать в линию доминантный бит, может подтянуть линию к земле. Это и приведет к тому, что на линии будет доминантный бит независимо от того, что выдают на линию другие участники коммуникации.
Это свойство используется для арбитража в сети CAN. Пусть несколько устройств хотят передать данные. Каждый из этих передатчиков сравнивает значение, которое он передает, со значением, фактически присутствующим на линии. В том случае, если передаваемое значение совпадает со считанным, устройство продолжает высылать свои данные. Если значения совпали у нескольких устройств, то все они продолжают передачу как ни в чем не бывало.
Продолжается это до того момента, когда значения станут различными. Если несколько устройств хотят передать рецессивный бит, а одно — доминантный, то в соответствии с правилом, которое мы обсудили выше, на линии окажется доминантный бит. В таком случае отправленные и считанные значения для устройств, пытающихся выдать на линию рецессивное состояние, не совпадут. В этом случае они должны прекратить передачу. А тот узел, который в этот момент передавал доминантный бит, продолжит свою работу. Доминирование в чистом виде )
Сигналы, которые передаются по витой паре, получили название CAN_H и CAN_L (High и Low). Доминантное состояние соответствует случаю, когда потенциал сигнала CAN_H выше потенциала CAN_L. Рецессивное — когда потенциалы равны (разница потенциалов не превышает допустимого отклонения, 0.5 В).
С этим вроде бы разобрались, давайте двигаться дальше! Пришло время определить, как биты объединяются в кадры. Протокол CAN определяет 4 вида кадров:
- Кадр данных (data frame)
- Кадр удаленного запроса (remote frame)
- Кадр перегрузки (overload frame)
- Кадр ошибки (error frame)
Для кадра данных возможны два варианта — базовый формат и расширенный. Вот так выглядит структура базового формата:
| Поле | Длина | Описание |
|---|---|---|
| Начало кадра (SOF) | 1 бит | Начало передачи кадра |
| Идентификатор (ID) | 11 бит | Идентификатор сообщения |
| Запрос на передачу (RTR) | 1 бит | Доминантный бит |
| Бит расширения идентификатора (IDE) | 1 бит | Бит определяет длину идентификатора, для базового формата — доминантный бит |
| Зарезервированный бит | 1 бит | Зарезервировано |
| Длина данных (DLC) | 4 бита | Количество байт данных |
| Данные | 0 — 8 байт | Данные |
| Контрольная сумма (CRC) | 15 бит | Контрольная сумма |
| Разграничитель контрольной суммы | 1 бит | Рецессивный бит |
| Промежуток подтверждения (ACK) | 1 бит | Для приемника — доминантный бит, для передатчика — рецессивный |
| Разграничитель подтверждения | 1 бит | Рецессивный бит |
| Конец кадра (EOF) | 7 бит | Все биты рецессивные |
А это структура расширенного:
| Поле | Длина | Описание |
|---|---|---|
| Начало кадра (SOF) | 1 бит | Начало передачи кадра |
| Идентификатор A (ID A) | 11 бит | Первая часть идентификатора |
| Подмена запроса на передачу (SRR) | 1 бит | Рецессивный бит |
| Бит расширения идентификатора (IDE) | 1 бит | Бит определяет длину идентификатора, для расширенного формата — рецессивный бит |
| Идентификатор B (ID B) | 18 бит | Вторая часть идентификатора |
| Запрос на передачу (RTR) | 1 бит | Доминантный бит |
| Зарезервированные биты | 2 бита | Зарезервировано |
| Длина данных (DLC) | 4 бита | Количество байт данных |
| Данные | 0 — 8 байт | Данные |
| Контрольная сумма (CRC) | 15 бит | Контрольная сумма |
| Разграничитель контрольной суммы | 1 бит | Рецессивный бит |
| Промежуток подтверждения (ACK) | 1 бит | Для приемника — доминантный бит, для передатчика — рецессивный |
| Разграничитель подтверждения | 1 бит | Рецессивный бит |
| Конец кадра (EOF) | 7 бит | Все биты рецессивные |
Результирующий идентификатор получается в результате объединения полей «Идентификатор A» и «Идентификатор B«.
Кадр удаленного запроса (remote frame) представляет из себя кадр данных, описанный выше, но без поля данных и с рецессивным битом RTR. Он используется в случае, когда один узел хочет запросить данные у другого узла.
Кадр ошибки (error frame) передает устройство, обнаружившее ошибку в сети. Фрейм ошибки имеет наивысший приоритет и принимается всеми устройствами сети в обязательном порядке.
Кадр перегрузки (overload frame) используется очень редко. Его идея и назначение заключаются в том, что с его помощью устройство, которое в данный момент не может принять данные, запрашивает повторную передачу этих же данных.
Давайте вернемся чуть назад, к арбитражу данных, и рассмотрим, что это может означать на практике. Итак, несколько устройств начинают передачу сообщения, а точнее кадра данных. Передается бит начала кадра и затем начинается передача идентификатора сообщения. Как вы помните, приоритет будет у того устройства, которое будет передавать доминантный бит, в тот момент, когда все остальные будут передавать рецессивный. То есть чем «позже» среди битов идентификатора появится «рецессивный бит», тем выше будет его приоритет. Другими словами: более высокий приоритет при использовании интерфейса CAN имеют сообщения с меньшим значением идентификатора.
Первые два типа кадров — кадр данных и кадр удаленного запроса — отделяются от других кадров специальным межкадровым промежутком (паузой). А для фреймов ошибки и перегрузки предусмотрена передача без пауз, чтобы обеспечить их скорейшую обработку узлами сети.
Итак, что у нас на очереди теперь? Конечно же контроль ошибок — важнейший аспект работы протокола CAN. Стандарт предусматривает несколько механизмов:
- Во-первых, это контроль передачи битов — уровень сигнала в сети сравнивается с передаваемым для каждого бита.
- Второй механизм заключается в использовании дополнительных битов (stuffing bit). После передачи любых пяти одинаковых битов автоматически добавляется передача бита противоположного значения. Таким образом, при передаче шести одинаковых битов диагностируется ошибка stuffing’а. Этот механизм используется для кодирования всех полей фреймов данных и запроса. Исключением являются только поля промежутка подтверждения, разграничителя контрольной суммы и EOF.
- Стандартная процедура проверки контрольной суммы. Передатчик вычисляет контрольную сумму для текущего кадра и передает ее в линию. В свою очередь, приемник также вычисляет контрольную сумму для принимаемых данных и сравнивает ее с тем значением, которое было отправлено передатчиком. В случае не совпадения значений диагностируется ошибка CRC.
- Также выполняется контроль битов фрейма, которые должны иметь заранее определенное значение. В случае, если реальное значение не совпадает с тем, которое ожидается, возникает ошибка.
Благодаря всем этим механизмам, вероятность необнаружения ошибки является очень низкой, что, конечно же, не может не радовать 👍
Кроме того, если один из узлов обнаружил ошибку в сообщении, он сообщает об этом в сеть CAN при помощи фрейма ошибки. А поскольку сеть у нас широковещательная, то о возникновении ошибки становится известно всем участникам коммуникации. И если в сообщении была обнаружена ошибка, его передача будет осуществлена еще раз.
И на этом еще не все! Каждый узел может находиться в одном из трех состояний:
- Error Active
- Error Passive
- Bus Off
Протокол CAN предусматривает, что изначально, после старта, узел находится в первом из этих состояний — Error Active. Каждое устройство имеет два счетчика ошибок:
- Счетчик ошибок передачи
- Счетчик ошибок приема
Существуют определенные правила обслуживания этих счетчиков, которые сводятся к следующему. Передатчик, обнаруживший ошибку, увеличивает свой счетчик ошибок передачи быстрее, чем приемники увеличивают свои счетчики ошибок приема. Это связано с предположением, что при ошибке, вероятность того, что сбой произошел именно в передатчике, а не в приемнике, достаточно велика. На практике ошибка передачи увеличивает соответствующий счетчик на 8, а ошибка приема лишь на 1. При приеме или передаче корректного сообщения как счетчик ошибок передачи, так и счетчики ошибок приема уменьшаются на 1.
Если значение любого из этих двух счетчиков узла превысит значение 127, то узел переходит в состояние Error Passive. А если величина одного из счетчиков превысит 255, то узел перейдет в состояние Bus Off.
Разница между этими состояниями заключается в действиях узла при диагностировании ошибки:
- Узел в состоянии Error Active при обнаружении ошибки передает в шину Active Error Flags — 6 доминантных бит. Поскольку биты доминантные, то это сообщение нарушает обычную работу шины и поэтому все устройства сети также фиксируют возникновение ошибки.
- Узел в состоянии Error Passive при обнаружении ошибки передает в шину Passive Error Flags — 6 рецессивных бит, которые игнорируются всеми другими участниками обмена. Поэтому увеличивается только величина счетчика ошибок одного конкретного узла.
- И, наконец, узел в состоянии Bus Off ничего не передает в сеть — ни фреймы ошибок, ни фреймы данных, ни какие-либо другие.
Как видите, протокол CAN крайне интересен для изучения, надежен, безопасен, и удобен в использовании. И на этой позитивной ноте на сегодня заканчиваем, скоро займемся практической реализацией протокола, также поговорим о микросхемах и устройствах, обеспечивающих работу с CAN. Так что подписывайтесь на обновления, буду рад снова видеть вас на нашем сайте 🤝
What are Error Active, Error Passive, and Bus off of CAN Bus?
Just to give a little background to the answer:
In order to prevent malfunctioning nodes from disturbing, or even blocking, an entire system, the CAN protocol implements a sophisticated fault confinement mechanism. The CAN protocol is intended to be orthogonal, i.e. all nodes address faults in the same manner. Fault confinement is provided where each node constantly monitors its performance with regard to successful and unsuccessful message transactions. A Transmit Error Counter (TEC) and a Receive Error Counter (REC) create a metric for communication quality based on historic performance. Each node will act on its own bus status based on its individual history. As a result, a graceful degradation allows a node to disconnect itself from the bus i.e. stop transmitting. This means that a permanently faulty device will cease to be active on the bus (go into Bus Off state), but communications between other nodes can
continue unhindered. If the bus media is severed, shorted or suffers from some other failure mode the ability to continue communications is dependent upon the condition and the physical interface used.
Fault confinement is a checking mechanism that makes it possible to distinguish between short disturbances (e.g. switching noise from a nearby power cable couples into the transmission media) and permanent failures (e.g. a node is malfunctioning and disturbs the bus).
Manipulation of the error counters is asymmetric. On a successful transmission, or reception, of a message, the respective error counter is decremented if it had not been at zero. In the case of a transmit or receive error the counters are incremented, but by a value greater than the value they would be decrement by following a successful message transaction.
If a node detects a local error condition (e.g. due to local conducted noise, application software, etc.), its resulting error flag (primary error flag) will subsequently cause all other nodes to respond with an error flag too (secondary error flags). It is important that a distinction is made between the nodes that detected an error first and the nodes which responded to the primary error flag. If a node transmits an active error frame, and it monitors a dominant bit after the sixth bit of its error flag, it considers itself as the node that has detected the error first. In the case where a node detects errors first too
often, it is regarded as malfunctioning, and its impact to the network has to be limited. Therefore, a node can be in one of three possible error states:
Error active
Both of its error counters are less than 128. It takes part fully in bus communication and signals an error by transmission of an active error frame.This consists of sequence of 6 dominant bits followed by 8 recessive bits, all other nodes respond with the appropriate error flag, in response to the violation of the bit stuffing rule.
Error passive
A node goes into error passive state if at least one of its error counters is greater than 127. It still takes part in bus activities, but it sends a passive error frame only, on errors. Furthermore, an error passive node has to wait an additional time (Suspend Transmission Field, 8 recessive bits after Intermission Field) after transmission of a message, before it can initiate a new data transfer. The primary passive error flag consists of 6 passive bits and thus is “transparent” on the bus and will not “jam” communications.
Bus Off
If the Transmit Error Counter of a CAN controller exceeds 255, it goes into the bus off state. It is disconnected from the bus (using internal logic) and does not take part in bus activities anymore. In order to reconnect the protocol controller, a so-called Bus Off recovery sequence has to be executed. This usually involves the re-initialization and configuration of the CAN controller by the host system, after which it will wait for 128 * 11 recessive bit times before it commences communication.
-
When a receiver detects an error, the REC will be increased by 1, except when the detected error was a Bit Error during the sending of an Active error Flag or an Overload Flag.
-
When a receiver detects a dominant bit as the first bit after sending an Error Flag, the REC will be increased by 8.
-
When a transmitter sends an Error Flag, the TEC is increased by 8. Exception 1: If the transmitter is Error Passive and detects an ACK Error because of not detecting a dominant ACK and does not detect a dominant bit while sending its Passive Error Flag. Exception 2: If the transmitter sends an Error Flag because a Stuff Error occurred during arbitration, and should have been recessive, and has been sent as recessive but monitored as dominant.
-
If the transmitter detects a Bit Error while sending an Active Error Flag or an Overload Frame, the TEC is increased by 8.
-
If a receiver detects a Bit Error while sending an Active Error Flag or an Overload Flag, the REC is increased by 8.
-
Any node tolerates up to 7 consecutive dominant bits after sending an Active Error Flag, Passive Error Flag or Overload Flag. After detecting the fourteenth consecutive dominant bit (in case of an Active Error Flag or an Overload Flag) or after detecting the eighth consecutive dominant bit following a Passive Error Flag, and after each sequence of additional eight consecutive dominant bits, ever y transmitter increases its TEC by 8 and every receiver increases its REC by 8.
-
After successful transmission of a frame (getting ACK and no error until EOF is finished), the TEC is decreased by 1 unless it was already 0.
-
After the successful reception of a frame (reception without error up to the ACK Slot and the successful sending of the ACK bit), the REC is decreased by 1, if it was between 1 and 127. If the REC was 0, it stays 0, and if it was greater than 127, then it will be set to a value between 119 and 127.
-
A node is Error Passive when the TEC equals or exceeds 128, or when the REC equals or exceeds 128. An error condition letting a node become Error Passive causes the node to send an Active Error Flag.
-
A node is Bus Off when the TEC is greater than or equal to 256.
-
An Error Passive node becomes Error Active again when both the TEC and the REC are less than or equal to 127.
-
A node which is Bus Off is permitted to become Error Active (no longer Bus Off) with its error counters both set to 0 after 128 occurrence of 11 consecutive recessive bits have been monitored on the bus.

Need a practical intro to CAN bus errors?
In this tutorial you’ll learn about the basics of CAN error handling, the 5 CAN bus error types, the CAN
error frame and CAN node error states.
To get practical, we’ll also generate & record CAN errors in 6 experiments.
In this article
- What are CAN bus errors?
- The CAN error frame
- 5 CAN error types
- States & error counters
- 6 practical experiments
- LIN bus errors
- CAN error logging use cases
- FAQ

What are CAN bus errors?
As explained in our simple intro
to CAN
bus, the Controller Area Network is today the de facto standard across automotives and industrial
automation
systems.
A core benefit is the robustness of CAN, making it ideal for safety critical
applications.
Here, it is worth noting:
Error handling is vital to the robustness of CAN.
CAN bus errors can occur for several reasons — faulty cables, noise, incorrect termination, malfunctioning
CAN nodes etc. Identifying, classifying and resolving such CAN errors is key to ensuring the continued
performance of the overall CAN system.
In particular, error handling identifies and rejects erroneous messages, enabling a sender to
re-transmit the message. Further, the process helps identify and disconnect CAN nodes that
consistently transmit erroneous messages.

How does CAN error handling work?
Error handling is a built-in part of the CAN standard and every CAN controller. In other words, every
CAN node handles fault identification and confinement identically. Below we’ve made a simple illustrative example:

- CAN node 1 transmits a message onto the CAN bus — and reads every bit it sends
- In doing so, it discovers that one bit that was sent dominant was read recessive
- This is a ‘Bit Error’ and node 1 raises an Active Error Flag to inform other nodes
- In practice, this means that node 1 sends a sequence of 6 dominant bits onto the bus
- In turn, the 6 dominant bits are seen as a ‘Bit Stuffing Error’ by other nodes
- In response, nodes 2 and 3 simultaneously raise an Active Error Flag
- This sequence of raised error flags comprise part of a ‘CAN error frame’
- CAN node 1, the transmitter, increases its ‘Transmit Error Counter’ (TEC) by 8
- CAN nodes 2 and 3 increase their ‘Receive Error Counter’ (REC) by 1
- CAN node 1 automatically re-transmits the message — and now succeeds
- As a result, node 1 reduces its TEC by 1 and nodes 2 and 3 reduce their REC by 1
The example references a number of concepts that we will detail shortly: Error frames, error
types, counters and states.
The CAN bus error frame
In the illustrative example, the CAN nodes ‘raise Active Error Flags’, thus creating an ‘error frame’ in
response to detecting a CAN error.
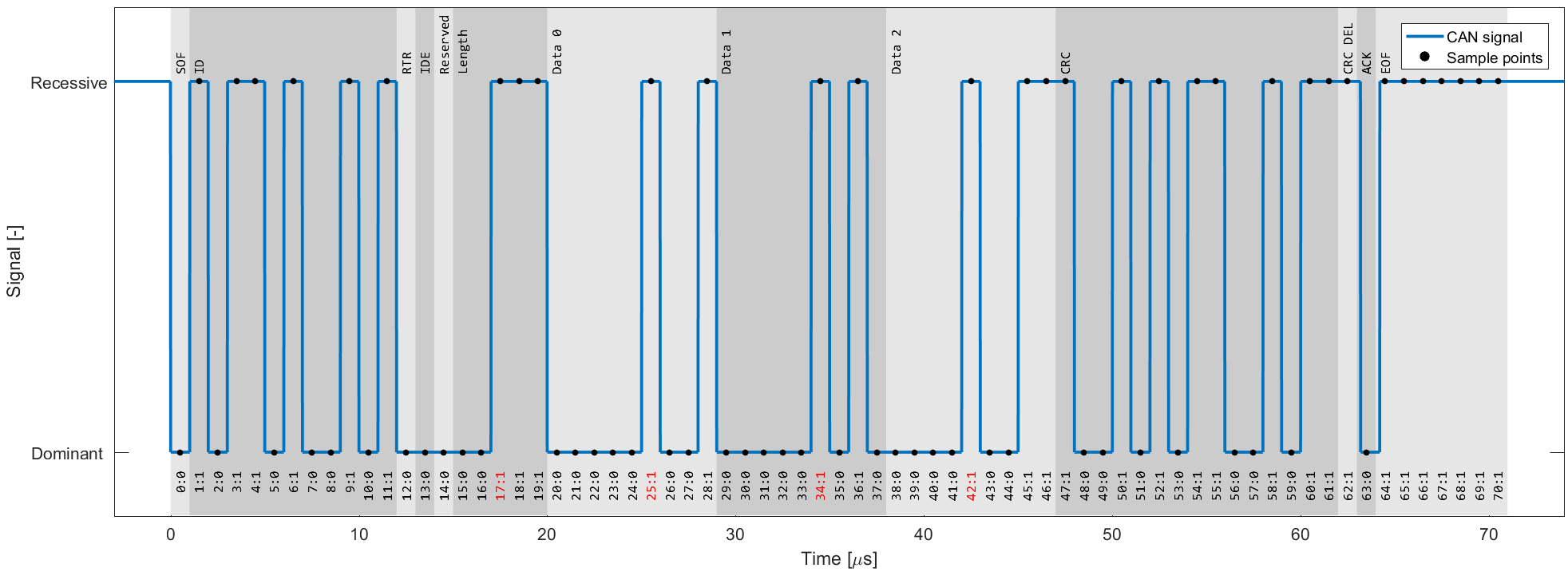
To understand how this works, let us first look at a «normal» CAN frame (without errors):

CAN bus bit stuffing
Notice that we highlighted ‘bit stuffing’ across the CAN frame.
Bit stuffing is a subtle, but vital part of the CAN standard. Basically it states that whenever a CAN node
sends five bits of the same logic level (dominant or recessive), it must send one bit of the opposite level.
This extra bit is automatically removed by the receiving CAN nodes. This process helps ensure continuous
synchronisation of the network.
As per the previous example, when CAN node 1 detects an error during the transmission of a CAN message, it
immediately transmits a sequence of 6 bits of the same logic level — also referred to as raising an Active
Error Flag.
If we measure the transmission of a CAN frame via an oscilloscope and digitize the result, we can also
see the stuff bits in practice (see the red timestamp marks):


Active Error Flags
As we just learned, such a sequence is a violation of the bit stuffing rule — aka a ‘Bit Stuffing Error’.
Further, this error is visible to all CAN nodes on the network (in contrast to the ‘Bit Error’ that resulted
in this error flag being raised). Thus, the raising of error flags can be seen as a way of
«globalizing» the discovery of an error, ensuring that every CAN node is informed.
Note that the other CAN nodes will see the Active Error Flag as a Bit Stuffing Error. In
response they also raise an Active Error Flag.
As we’ll explain shortly, it is important to distinguish between the error flags. In particular, the first
error flag
(from the ‘discovering’ node) is often referred to as a ‘primary’ Active Error Flag, while
the error flags of
subsequent ‘reacting’ nodes are referred to as the ‘secondary’ Active Error Flag(s).
3 CAN error frame examples
Let’s look at three example scenarios:
Example 1: 6 bits of error flags
Here, all CAN nodes simultaneously discover that an error exists in a CAN message and raise their error
flags at the same time.
The result is that the error flags all overlap and the total sequence of dominant
bits lasts for 6 bits in total. All CAN nodes will in this case consider themselves the ‘discovering’ CAN
nodes.
This type of simultaneous discovery is less common in practice. However, it could e.g. happen as a
result of Form
Errors (such as a CRC delimiter being dominant instead of recessive), or if a CAN transmitter
experiences a bit error during the writing of a CRC field.


Example 2: 12 bits of error flags
Here, CAN node 1 transmits a dominant bit, but reads it as recessive — meaning that it discovers a Bit Error.
It immediately transmits a sequence of 6 dominant bits.
The other nodes only discover the Bit Stuffing Error
after the full 6 bits have been read, after which they simultaneously raise their error flags, resulting in
a subsequent sequence of 6 dominant bits — i.e. 12 in total.
Example 3: 9 bits of error flags
Here, CAN node 1 has already transmitted a sequence of 3 dominant bits when it discovers a Bit Error and
begins sending 6 dominant bits.
Once halfway through the primary Active Error Flag, nodes 2 and 3 recognize
the Bit Stuffing Error (due to the 3 initial dominant bits being followed by another 3 dominant bits) and
they begin raising their error flags. The result is that the sequence of dominant bits from error flags
becomes 9 bit long.

The above logic of raising error flags is reflected in what we call an ‘active’ CAN error frame.

Note in particular how the secondary error flags raised by various nodes overlap each other — and how the
primary and secondary flags may overlap as well. The result is that the dominant bit sequence from raised
error
flags may be 6 to 12 bits long.
This sequence is always terminated by a sequence of 8 recessive bits, marking the end of the error frame.
In practice, the active error frame may «begin» at different places in the erroneous CAN frame, depending on
when the
error is discovered. The result, however, will be the same: All nodes discard the erroneous CAN frame and
the
transmitting node can attempt to re-transmit the failed message.
Passive Error Flags
If a CAN node has moved from its default ‘active’ state to a ‘passive’ state (more on this shortly), it will only be
able to raise so-called ‘Passive Error Flags’. A Passive Error Flag is a sequence of 6 recessive bits as seen below.
In this case it’s relevant to distinguish between a Passive Error Flag raised by a transmitting node and a receiving
node.

Example 4: Transmitter is Error Passive
As shown in the illustration (Example 4), if a transmitter (such as CAN node 1 in our example) raises a
Passive Error Flag (e.g. in response to a Bit Error), this will correspond to a consecutive sequence of 6
recessive bits.
This is in turn detected as a Bit Stuffing Error by all CAN nodes. Assuming the other CAN
nodes are still in their Error Active state, they will raise Active Error Flags of 6 dominant bits. In other
words, a passive transmitter can still «communicate» that a CAN frame is erroneous.
Example 5: Receiver is Error Passive
In contrast, if a receiver raises a Passive Error Flag this is in practice «invisible» to all other CAN nodes
on the bus (as any dominant bits win over the sequence of recessive bits) — see also Example 5.
Effectively,
this means that an Error Passive receiver no longer has the ability to destroy frames transmitted by
other CAN nodes.

CAN error types
Next, let us look at what errors may cause CAN nodes to raise error flags.
The CAN bus protocol specifies 5 CAN error types:
- Bit Error [Transmitter]
- Bit Stuffing Error [Receiver]
- Form Error [Receiver]
- ACK Error (Acknowledgement) [Transmitter]
- CRC Error (Cyclic Redundancy Check) [Receiver]
We’ve already looked at Bit Errors and Bit Stuffing Errors briefly, both of which are evaluated at the bit
level. The remaining three CAN error types are evaluated at the message level.
Below we detail each error type:


#1 Bit Error
Every CAN node on the CAN bus will monitor the signal level at any given time — which means that a
transmitting CAN node also «reads back» every bit it transmits. If the transmitter reads a different data
bit level vs. what it transmitted, the transmitter detects this as a Bit Error.
If a bit mismatch occurs during the arbitration process (i.e. when sending the CAN ID), it is not
interpreted as a Bit Error. Similarly, a mismatch in the acknowledgement slot (ACK field) does not cause
a Bit Error as the ACK field specifically requires a recessive bit from the transmitter to be
overwritten by a dominant bit from a receiver.

#2 Bit Stuffing Error
As explained, bit stuffing is part of the CAN standard. It dictates that after every 5 consecutive bits of
the same logical level, the 6th bit must be a complement. This is required to ensure the on-going
synchronization of the network by providing rising edges. Further, it ensures that a stream of bits are not
mis-interpreted as an error frame or as the interframe space (7 bit recessive sequence) that marks the end
of a message. All CAN nodes automatically remove the extra bits.
If a sequence of 6 bits of the same logical level is observed on the bus within a CAN message (between the
SOF and CRC field), the receiver detects this as a Bit Stuffing Error aka Stuff Error.

#3 Form Error
This message-level check utilises the fact that certain fields/bits in the CAN message must always be of a
certain logical level. Specifically the 1-bit SOF must be dominant, while the entire 8-bit EOF field must be
recessive. Further, the ACK and CRC delimiters must be recessive. If a receiver finds that any of these are
bits are of an invalid logical level, the receiver detects this as a Form Error.

#4 ACK Error (Acknowledgement)
When a transmitter sends a CAN message, it will contain the ACK field (Acknowledgement), in which the
transmitter will transmit a recessive bit. All listening CAN nodes are expected to send a dominant bit in
this field to verify the reception of the message (regardless of whether the nodes are interested in the
message or not). If the transmitter does not read a dominant bit in the ACK slot, the
transmitter detects this as an ACK Error.

#5 CRC Error (Cyclic Redundancy Check)
Every CAN message contains a Cyclic Redundancy Checksum field of 15 bits. Here, the transmitter has
calculated the CRC value and added it to the message. Every receiving node will also calculate the CRC on
their own. If the receiver’s CRC calculation does not match the transmitter’s CRC, the
receiver detects this as a CRC Error.
CAN node states & error counters
As evident, CAN error handling helps destroy erroneous messages — and enables CAN nodes to retry the
transmission of
erroneous messages.
This ensures that short-lived local disturbances (e.g. from noise) will not
result in
invalid/lost data. Instead, the transmitter attempts to re-send the message. If it wins arbitration
(and there
are no errors), the message is successfully sent.
However, what if errors are due to a systematic malfunction in a transmitting node? This could
trigger an endless loop of sending/destroying the same message — jamming the CAN bus.
This is where CAN node states and error counters come in.


In short, the purpose of CAN error tracking is to confine errors by gracefully reducing the privileges of
problematic CAN nodes.
Specifically, let’s look at the three possible states:
-
Error Active: This is the default state of every CAN node, in which
it is able to
transmit data
and raise ‘Active Error Flags’ when detecting errors -
Error Passive: In this state, the CAN node is still able to
transmit data, but it now
raises
‘Passive Error Flags’ when detecting errors. Further, the CAN node now has to wait for an extra 8 bits
(aka
Suspend Transmission Time) in addition to the 3 bit intermission time before it can resume data
transmission (to
allow other CAN nodes to take control of the bus) -
Bus Off: In this state, the CAN node disconnects itself from the
CAN bus and can no
longer
transmit data or raise error flags
Every CAN controller keeps track of its own state and acts accordingly.
CAN nodes shift state depending on the value of their error counters. Specifically, every CAN node
keeps track on a Transmit Error Counter (TEC) and Receive Error Counter
(REC):
- A CAN node
enters the Error Passive state if the REC or TEC exceed 127 - A CAN node
enters the Bus Off state if the TEC exceeds 255
How do the error counters change?
Before we get into the logic of how error counters are increased/reduced, let us revisit the CAN error frame
as well
as the primary/secondary error flags.
As evident from the CAN error frame illustration, a CAN node that observes a dominant bit after its
own
sequence of 6
dominant bits will know that it raised a primary error flag. In this case, we can call this CAN
node the
‘discoverer’ of the error.
At first, it might sound positive to have a CAN node that repeatedly discovers errors and reacts promptly by
raising
an error flag before other nodes. However, in practice, the discoverer is typically also the culprit causing
errors
— and hence it is punished more severely as per the overview.

There are some additions/exceptions to the above rules, see e.g. this overview.
Most are pretty straight-forward based on our previous illustrative example. For example, it seems clear that CAN
node 1 would increase the TEC by 8 as it discovers the Bit Error and raises an error flag. The other nodes in
this
case increase their REC by 1.
This has the intuitive consequence that the transmitting node will quickly reach the Error Passive and eventually
Bus
Off states if it continuously produces faulty CAN messages — whereas the receiving nodes do not change state.
The case where a receiver raises the primary error flag may seem counter-intuitive. However, this could for
example
be the case if a receiver CAN node is malfunctioning in a way that causes it to incorrectly detect errors in
valid
CAN messages. In such a case, the receiver would raise the primary error flag, effectively causing an error.
Alternatively, it can happen in cases where all CAN nodes simultaneously raise error flags.
CAN/LIN data & error logger
The CANedge1 lets you easily
record data from 2 x CAN/LIN buses to an 8-32 GB SD card — incl. support for logging CAN/LIN errors. Simply
connect it to e.g. a car or truck to start logging —
and decode the data via free
software/APIs.
Further, the CANedge2
adds WiFi, letting you auto-transfer data to your own server — and update devices over-the-air.
learn
about the CANedge
Examples: Generating & logging error frames
We have now covered the theoretical basics of CAN errors and CAN error handling. Next, let us look at generating and
logging errors in practice. For this we will use a couple of CANedge devices — and for some tests a
PCAN-USB device.
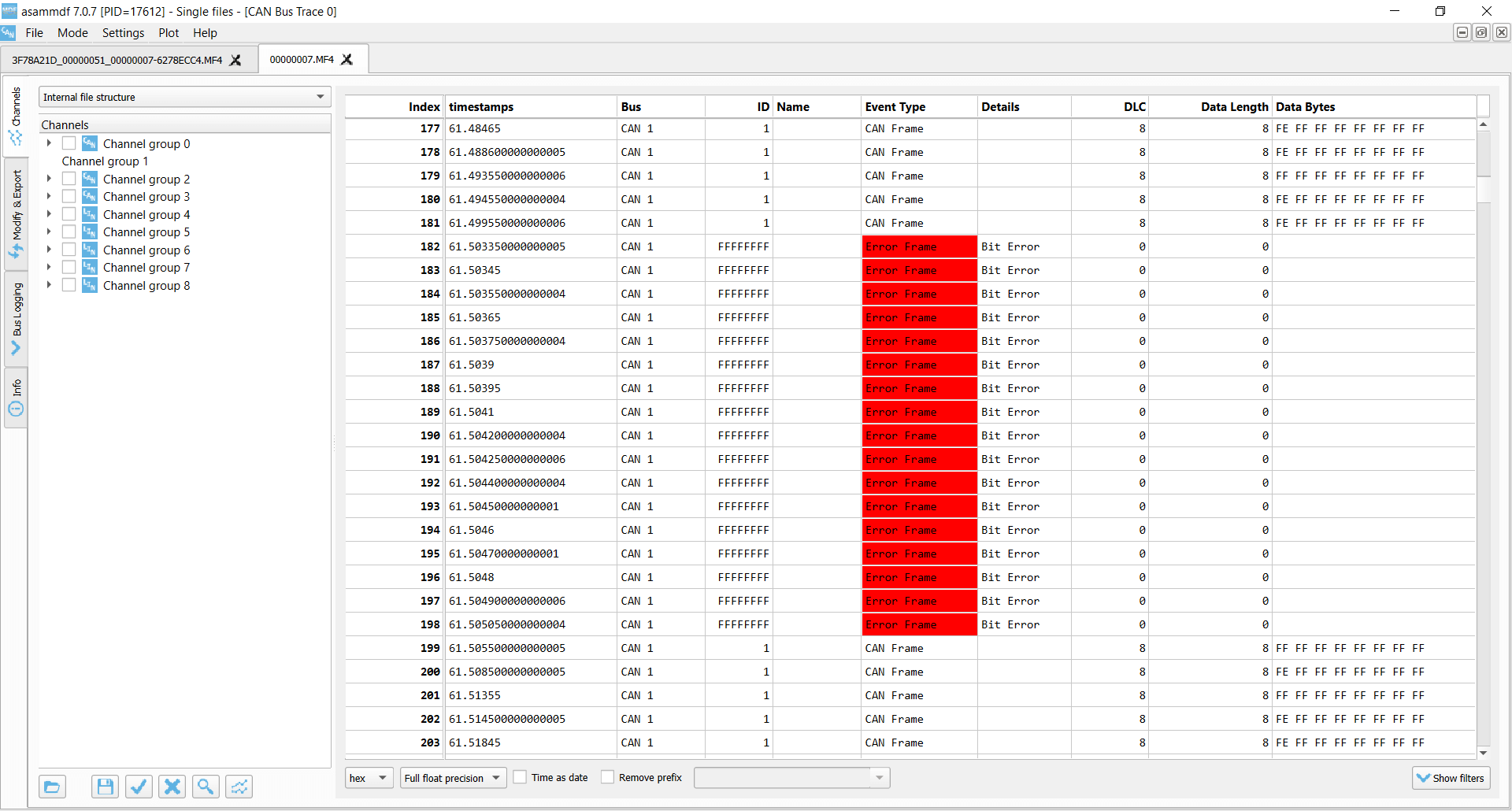
Tip: Download the MF4 data for the tests to view the data in asammdf or CANalyzer.
download data
Test #1: No CAN bus errors
As a benchmark, we start with a test involving no CAN bus errors. Here, a CANedge2 ‘transmitter’ sends
data to another CANedge2 ‘receiver’ — and both log CAN bus errors.
By loading the MF4 log
file in the asammdf GUI we
verify that no CAN errors occurred during this test, which is to be expected.


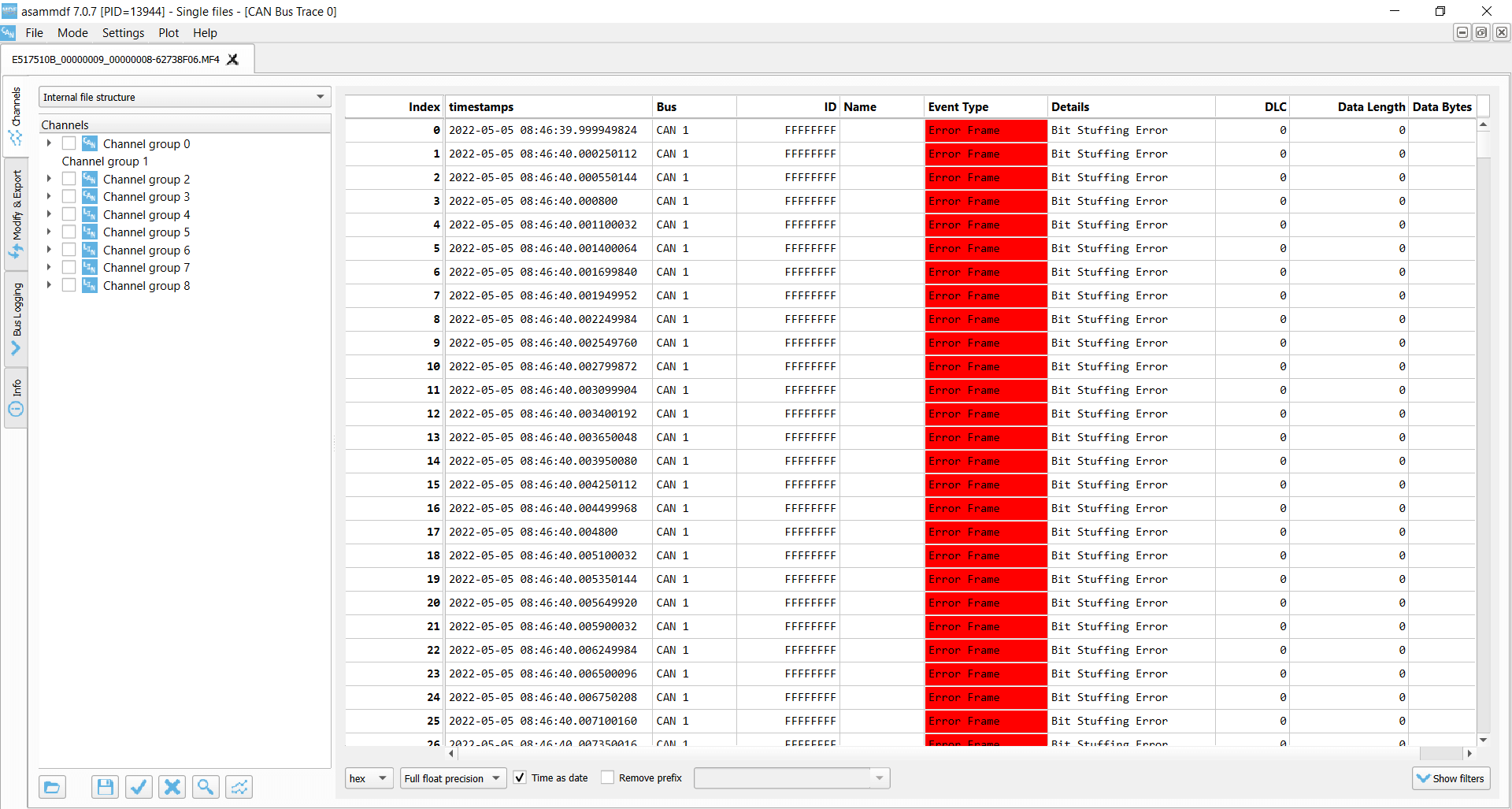
Test #2: Removing the CAN bus terminal resistor
In this test, we remove the CAN termination in the middle of a log session. This effectively corresponds to
immediately setting the bit level to dominant. As a result, the CANedge2 transmitter immediately starts
logging Bit Errors (which occur when it attempts to transmit a recessive bit, but reads a
dominant bit). The
CANedge2 Receiver logs Bit Stuffing Errors as it detects 6 consecutive dominant bits.
These errors are
recorded until the termination is added again.
Lack of termination is rarely a practical issue if you’re recording data from a vehicle, machine etc.
However, it’s a common issue when working with ‘test bench’ setups. Here, the lack of termination may
cause confusion as it can be difficult to distinguish from an inactive CAN bus. If in doubt, enabling
error frame logging on the CANedge can be useful in troubleshooting.

Transmitter Bit Errors

Receiver Bit Stuffing Errors
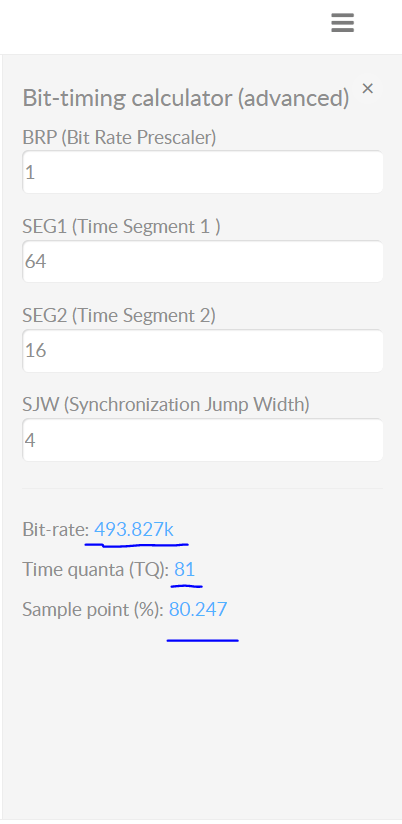
Test #3: Setting an incorrect baud rate
In this test we configure the CANedge receiver node to have a baud rate of 493.827K vs. the baud rate of the
transmitter of 500K. This is a fairly extreme difference and results in ACK Errors for the
transmitter and Bit
Stuffing Errors for the receiver.
In more realistic scenarios, smaller differences in the baud
rate
configuration of
various nodes may cause intermittent error frames and thus message loss.
This example is rather extreme. However, in practice we have sometimes seen CAN buses that use standard
bit rates
(250K, 500K, …), but with specific bit timing settings that differ from the ones that are typically
recommended
(and hence used by the CANedge). This will not lead to a complete shut-down of the communication, but
rather
periodic frame loss of a few percentages. To resolve this, you can construct an ‘advanced bit rate’ in
the
CANedge configuration, essentially setting up the bit-timing to better match the CAN bus you’re logging
from.

Transmitter ACK Error
Receiver Bit Stuffing Errors
Test #4: Removing the acknowledging CAN node
In this test, we use three CANedge units configured as follows:
-
CANedge1: Configured to
acknowledge data -
CANedge2 A:
Configured in ‘silent mode’ (no acknowledgement) -
CANedge2 B:
Configured to transmit a CAN frame every 500 ms
In the default setup, data is transmitted by the CANedge2 B onto the CAN bus and recorded with no errors.
However, if we remove the CANedge1 from the bus there are no longer any CAN nodes to acknowledge the frames
sent by the transmitter.
As a result, the transmitter detects ACK Errors. In response, it increases its
Transmit Error Counter and raises Active Error Flags onto the CAN bus. These are in turn
recorded by CANedge2 A (which silently monitors the bus) as Form Errors.
This is due to the fact that the transmitter raises them upon identifying the lack of a dominant
bit in the ACK slot. As soon as a dominant bit is observed by the receiver in the subsequent EOF field
(which should be recessive), a Form Error is detected.
As evident, the transmitter broadcasts 16 Active Error Flags as its TEC is increased from 0 to 16 x 8 =
128.
The transmitter has now exceeded the threshold of a TEC of 127 and enters Error Passive mode. As a
result,
the transmitter still experiences ACK Errors, but now only raises Passive Error Flags (not visible to
the
receiver). At this point, the transmitter keeps attempting to transmit the same frame — and the receiver
keeps recording this retransmission sequence.
This type of error is one we often encounter in our support tickets. Specifically, users may be trying to
use our CAN loggers to record data from a single CAN node (such as a sensor-to-CAN module like our
CANmod). If they decide to enable ‘silent mode’ on the CANedge in such an installation, no CAN nodes
will acknowledge the single CAN node broadcasting data — and the result will either be empty log files,
or log files filled with retransmissions of the same CAN frame (typically at very high frequency).


Transmitter ACK Errors

Receiver Form Errors
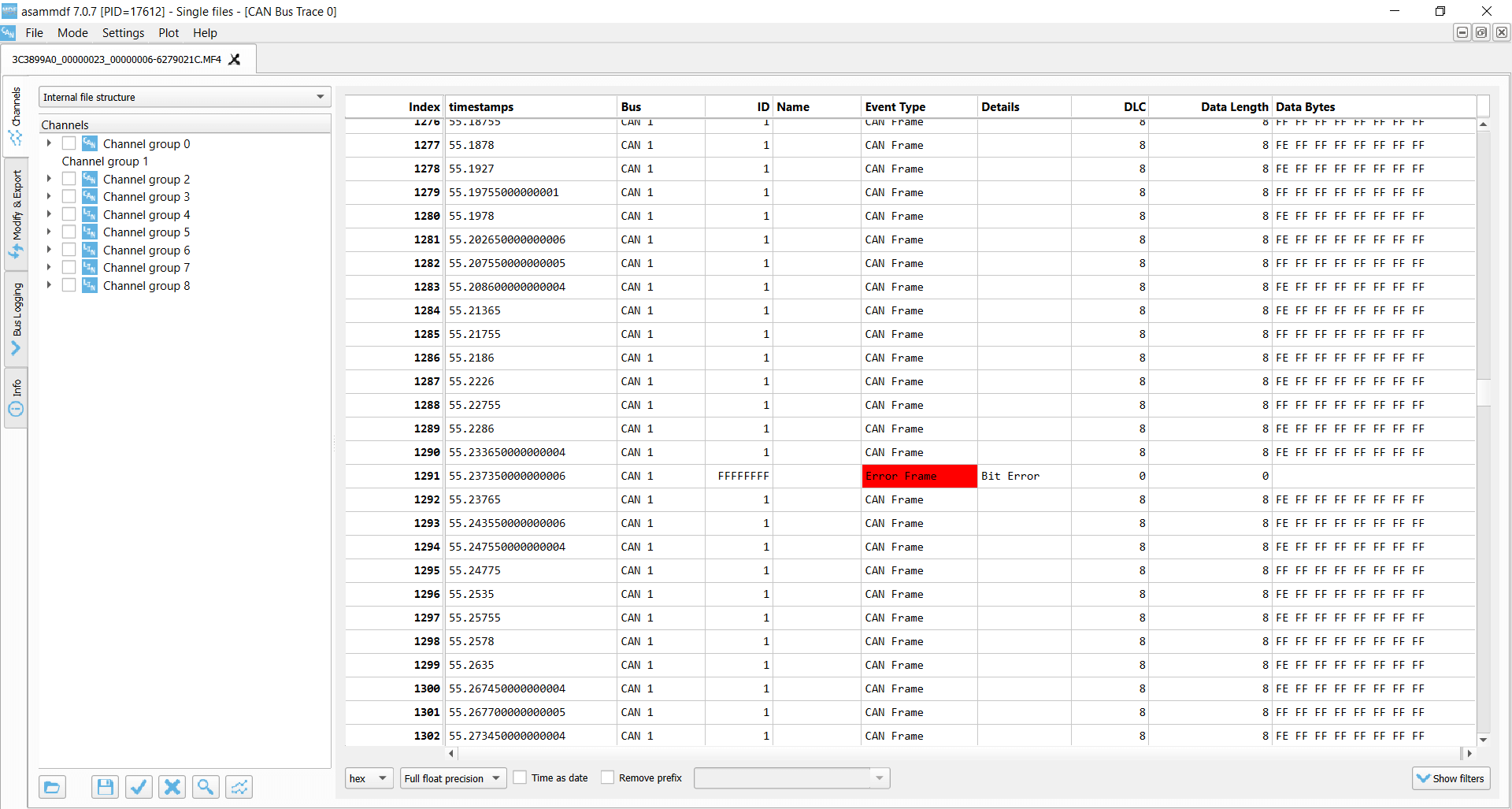
Test #5: CAN frame collisions (no retransmission)
When setting up a CAN bus, it is key to avoid overlapping CAN IDs. Failing to do so can result in frame
collisions
as two CAN nodes may both believe they’ve won the arbitration — and hence start transmitting their frames at
the same time.
To simulate this, we use the same setup as in test #4. In addition, we connect a PCAN-USB device as a
secondary
transmitter.
The CANedge2 transmitter is now configured to output a single CAN frame every 10 ms with CAN ID 1 and a
payload of
eight 0xFF bytes. Further, we configure the CANedge2 to disable retransmission of frames that were disrupted
by
errors. The PCAN-USB outputs an identical CAN frame every 2 ms with the 1st byte of the payload changed to
0xFE. The
PCAN device has retransmissions enabled.
This setup quickly creates a frame collision, resulting in the CANedge and PCAN transmitters detecting a
Bit
Error.
In response to this, both raise an Active Error Flag, which is detected as a Bit Stuffing
Error by the
CANedge
receiver. The PCAN device immediately attempts a retransmission and succeeds, while the CANedge waits with
further
transmission until the next message is to be sent.
This type of error should of course never happen in e.g. a car, since the design and test processes will
ensure
that all CAN nodes communicate via globally unique CAN identifiers. However, this problem can easily
occur if
you install a 3rd party device (e.g. a sensor-to-CAN module) to inject data into an existing CAN bus. If
you do
not ensure the global uniqueness of the CAN IDs of external CAN nodes, you may cause frame collisions
and hence
errors on the CAN bus. This is particularly important if your external CAN node broadcasts data with
high
priority CAN IDs as you may then affect safety critical CAN nodes.


USB-to-CAN transmitter Bit Error
CANedge transmitter Bit Error
CANedge receiver Bit Stuffing Error
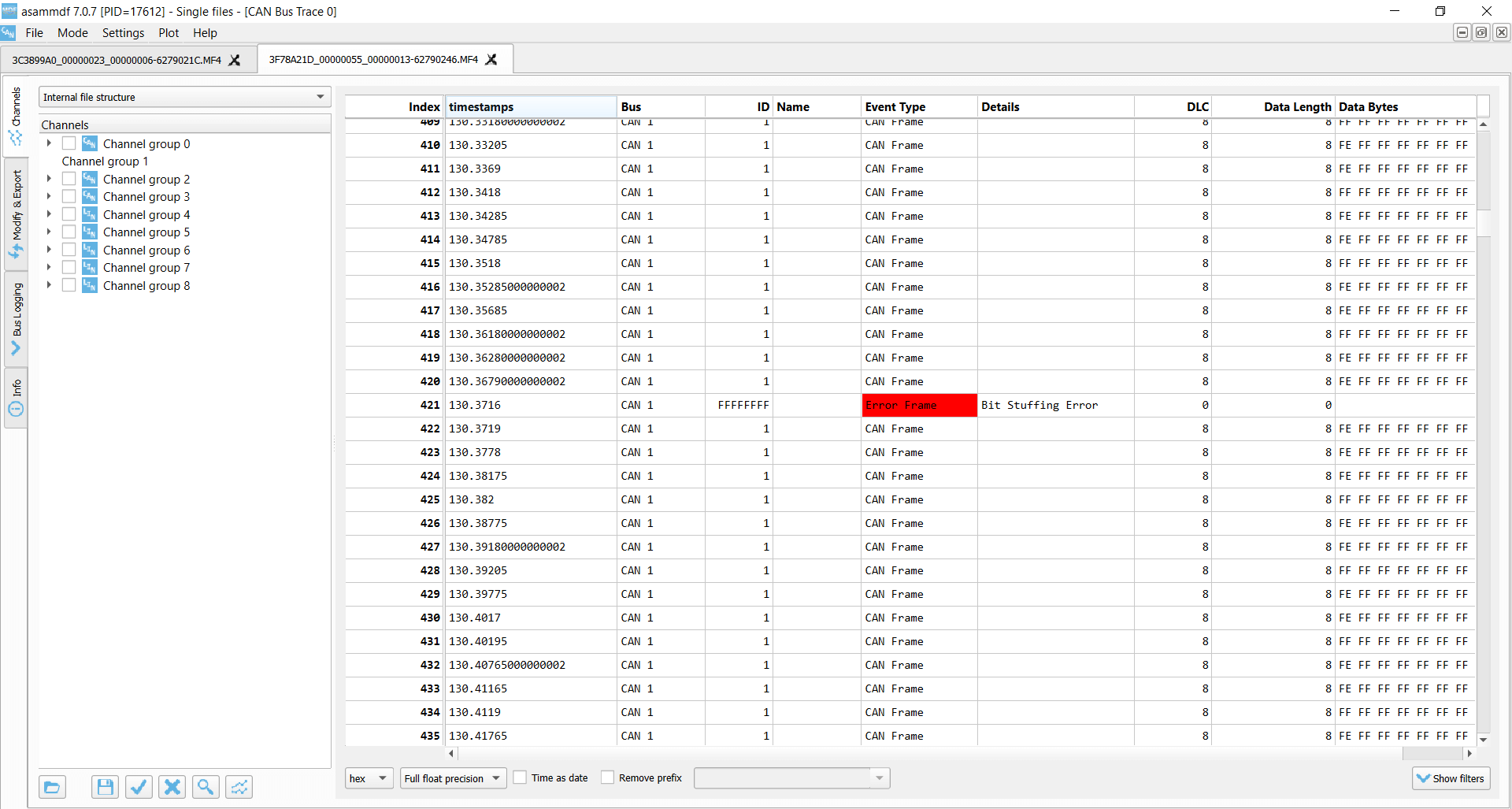
Test #6: CAN frame collisions (incl. retransmission)
In this test, we use the same setup as before, but we now enable retransmissions on the CANedge2 transmitter.
In this case, the frame collision results in a sequence of subsequent frame collisions as both the CANedge2
and the PCAN-USB device attempt to re-transmit their disrupted messages.
Due to the resulting Bit Errors, both raise a total of 16 Active Error Flags, which are detected as
Bit Stuffing Errors
by the silent CANedge2 receiver. Both transmitters then enter Error Passive mode and stop raising Active Error
Flags, meaning none of them can destroy CAN frames on the bus. As a result, one of the transmitters will
succeed in transmitting a full message, thus ending the retransmission frenzy — and enabling both devices to
resume transmission. However, this only lasts for a few seconds before another collision occurs.
The collision handling is a good example of how effective the CAN error handling is at ‘shutting down’
potentially
problematic sequences and enabling CAN nodes to resume communication. If a frame collision occurs, it is likely
that both CAN nodes will be set up to attempt retransmission, which would cause a jam if not for the error
handling and confinement.
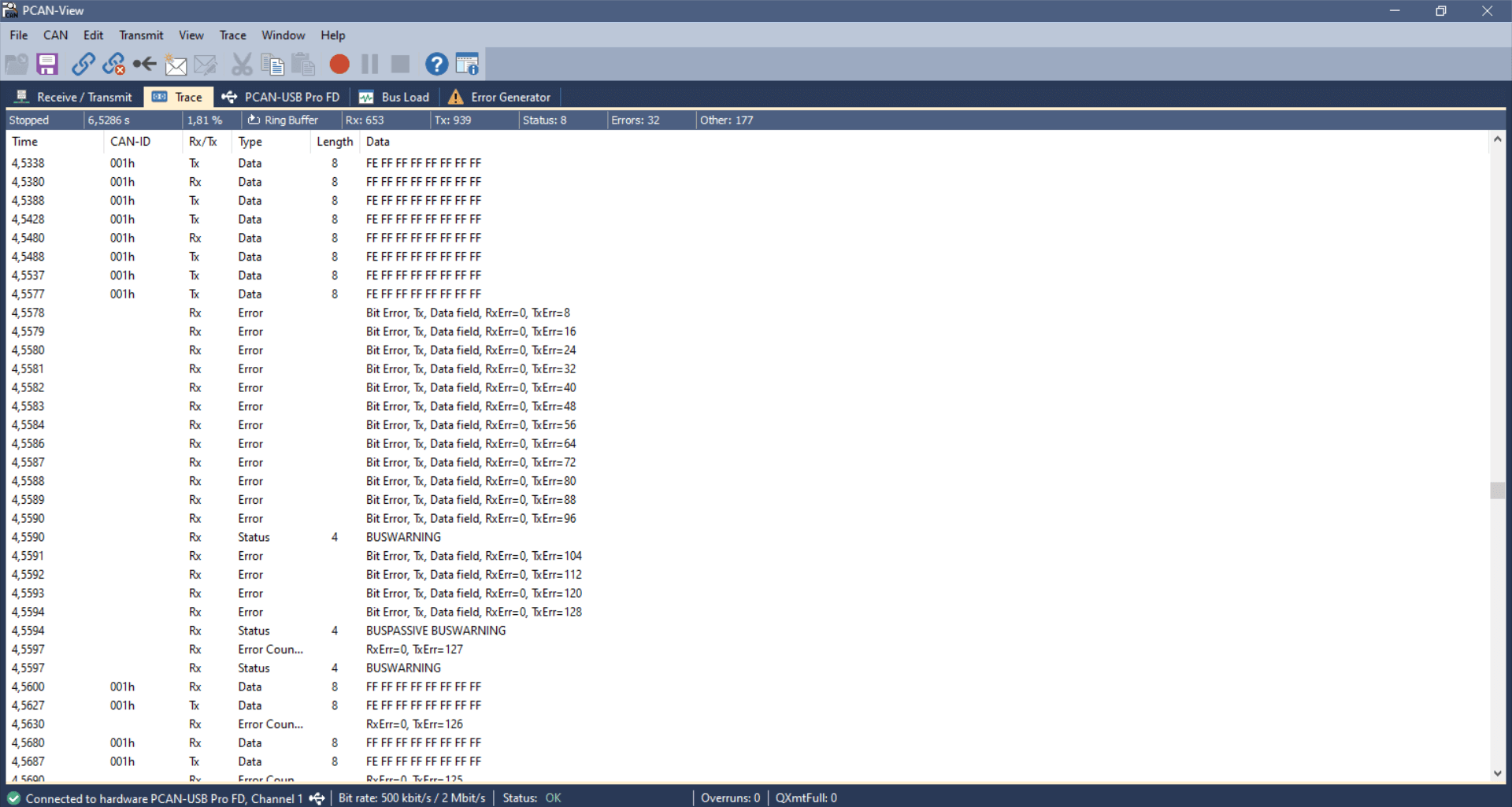
USB-to-CAN transmitter Bit Errors x 16
CANedge transmitter Bit Errors x 16

CANedge receiver Bit Stuffing Errors x 16
Similar to CAN bus errors, the LIN protocol also specifies a set of four error types, which we outline briefly below.
The CANedge supports both CAN/LIN error frame logging.
As for the CAN CRC Error, this error type implies that a LIN node has calculated a different checksum vs. the one
embedded in the LIN bus frame by the transmitter. If you’re using the CANedge as a LIN Subscriber, this error
may indicate that you’ve configured the device ‘frame table’ with incorrect identifiers for some of the LIN
frames on the bus.
This can in turn be used to ‘reverse engineer’ the correct lengths and IDs of proprietary LIN frames via a
step-by-step procedure. See the CANedge Docs for details.
These occur if a specific part of the LIN message does not match the expected value, or if there is a mismatch
between what is transmitted vs. read on the LIN bus.
This error indicates an invalid synchronization field in the start of the LIN frame. It can also indicate a large
deviation between the configured bit rate for a LIN node vs. the bit rate detected from the synchronization
field.
Transmission errors can occur for LIN identifiers registered as SUBSCRIBER messages. If there are no nodes
responding to a SUBSCRIBER message, a transmission error is logged.
Example use cases for CAN error frame logging
CAN bus diagnostics in OEM prototype vehicles
An automotive OEM may have the need to record CAN error frames in the field during late stage prototype
testing. By deploying a CANedge, the OEM engineering team will both be able to troubleshoot issues based on
the actual CAN signals (speed, RPM, temperatures) — as well as issues related with the lower layer CAN
communication in their prototype systems. This is particularly vital if the issues of interest are
intermittent and e.g. only happen once or twice per month. In such scenarios, CAN bus interfaces are not
well suited — and it becomes increasingly relevant to have a cost-effective device to enable scalable
deployments for faster troubleshooting.


Remotely troubleshooting CAN errors in machinery
An OEM or aftermarket user may need to capture rare CAN error events in their machines. To do so, they deploy
a CANedge2 to record the CAN data and related error frames — and automatically upload the data via WiFi to
their own cloud server. Here, errors are automatically identified and an alert is sent to the engineering
team to immediately allow for diagnosing and resolving the issue.
FAQ
No, error frame logging is a highly specific functionality — and only relevant if you know that you need to
record this information. Typically, it’s mainly of value during diagnostics by OEM engineers — and less so for
aftermarket users. In addition, if systematic errors occur they can quickly bloat the log file size.
With the CANedge2 you can of course enable/disable error frame logging over-the-air.
Yes, the CANedge is able to record all CAN/LIN error types. It does, however, not currently record its own error
counter status as this is deemed less relevant from a logging perspective.
The CANedge is only able to raise error flags onto the CAN bus if it is configured in its ‘normal’ mode, in which
it is also able to transmit messages. If in ‘restricted’ mode it can listen to CAN frames and acknowledge CAN
frames — but not raise Active Error Flags onto the bus. In ‘monitoring’ mode (aka ‘silent mode’) it can listen
to the CAN bus traffic, but not acknowledge messages nor raise Active Error Flags.
The CANedge will always record internal CAN/LIN error frames.
If a CAN frame is erroneous, resulting in an error frame, the CANedge generally only records the error type —
without any data related to the erroneous frame (beyond the timestamp). One exception to this rule is for
acknowledgement errors, where the CANedge will still record unacknowledged CAN frames (incl. from retransmission
attempts).
Some researchers have pointed out the risk that ‘bad actors’ could utilize the CAN bus error handling
functionality to enforce remote ‘bus off’ events for safety-critical ECUs. This is a good example of why CAN bus
data loggers & interfaces like the CANedge2 with remote
over-the-air data transfer and updates need to be highly secure (see also our intro to CAN
cybersecurity). For a nice overview of a remote bus off attack, see this
intro by Adrian Colyer.
For more intros, see our guides section — or download the
‘Ultimate Guide’ PDF.
Need to log CAN bus data & errors?
Get your CAN logger today!
Recommended for you
CAN Error Detection and Confinement
One of the most important and useful features of CAN is its high reliability, even in extremely noisy environments. CAN provides a variety of mechanisms to detect errors in frames. This error detection is used to retransmit the frame until it is received successfully. CAN also provides an error confinement mechanism used to remove a malfunctioning device from the CAN network when a high percentage of its frames result in errors. This error confinement prevents malfunctioning devices from disturbing the overall network traffic.
Error Detection
Whenever any CAN device detects an error in a frame, that device transmits a special sequence of bits called an error flag. This error flag is normally detected by the device transmitting the invalid frame, which then retransmits to correct the error. The retransmission starts over from the start of frame, and thus arbitration with other devices can occur again.
CAN devices detect the following errors, which are described in the following sections:
- Bit error
- Stuff error
- CRC error
- Form error
- Acknowledgment error
Bit Error
During frame transmissions, a CAN device monitors the bus on a bit-by-bit basis. If the bit level monitored is different from the transmitted bit, a bit error is detected. This bit error check applies only to the Data Length Code, Data Bytes, and Cyclic Redundancy Check fields of the transmitted frame.
Stuff Error
Whenever a transmitting device detects five consecutive bits of equal value, it automatically inserts a complemented bit into the transmitted bit stream. This stuff bit is automatically removed by all receiving devices. The bit stuffing scheme is used to guarantee enough edges in the bit stream to maintain synchronization within a frame.
A stuff error occurs whenever six consecutive bits of equal value are detected on the bus.
CRC Error
A CRC error is detected by a receiving device whenever the calculated CRC differs from the actual CRC in the frame.
Form Error
A form error occurs when a violation of the fundamental CAN frame encoding is detected. For example, if a CAN device begins transmitting the Start Of Frame bit for a new frame before the End Of Frame sequence completes for a previous frame (does not wait for bus idle), a form error is detected.
Acknowledgment Error
An acknowledgment error is detected by a transmitting device whenever it does not detect a dominant Acknowledgment Bit (ACK).
Error Confinement
To provide for error confinement, each CAN device must implement a transmit error counter and a receive error counter. The transmit error counter is incremented when errors are detected for transmitted frames, and decremented when a frame is transmitted successfully. The receive error counter is used for received frames in much the same way. The error counters are increased more for errors than they are decreased for successful reception/transmission. This ensures that the error counters will generally increase when a certain ratio of frames (roughly 1/8) encounter errors. By maintaining the error counters in this manner, the CAN protocol can generally distinguish temporary errors (such as those caused by external noise) from permanent failures (such as a broken cable). For complete information on the rules used to increment/decrement the error counters, refer to the CAN specification (ISO 11898).
With regard to error confinement, each CAN device may be in one of three states: error active, error passive, and bus off.
Error Active State
When a CAN device is powered on, it begins in the error active state. A device in error active state can normally take part in communication, and transmits an active error flag when an error is detected. This active error flag (sequence of dominant 0 bits) causes the current frame transmission to abort, resulting in a subsequent retransmission. A CAN device remains in the error active state as long as the transmit and receive error counters are both below 128. In a normally functioning network of CAN devices, all devices are in the error active state.
Error Passive State
If either the transmit error counter or the receive error counter increments above 127, the CAN device transitions into the error passive state. A device in error passive state can still take part in communication, but transmits a passive error flag when an error is detected. This passive error flag (sequence of recessive 1 bits) generally does not abort frames transmitted by other devices. Since passive error flags cannot prevail over any activity on the bus line, they are noticed only when the error passive device is transmitting a frame. Thus, if an error passive device detects a receive error on a frame which is received successfully by other devices, the frame is not retransmitted.
One special rule to keep in mind: When an error passive device detects an acknowledgment error, it does not increment its transmit error counter. Thus, if a CAN network consists of only one device (for example, if you do not connect a cable to the National Instruments CAN interface), and that device attempts to transmit a frame, it retransmits continuously but never goes into bus off state (although it eventually reaches error passive state).
Bus Off State
If the transmit error counter increments above 255, the CAN device transitions into the bus off state. A device in the bus off state does not transmit or receive any frames, and thus cannot have any influence on the bus. The bus off state is used to disable a malfunctioning CAN device which frequently transmits invalid frames, so that the device does not adversely affect other devices on the network. When a CAN device transitions to bus off, it can be placed back into error active state (with both counters reset to zero) only by manual intervention. For sensor/actuator types of devices, this often involves powering the device off then on. For NI-CAN network interfaces, communication can be started again using an API function.
Now when we have studied CAN bus protocol and its functioning, it would be easy to understand how it faces errors and deals with them. Of course, no system is an ideal system. Errors are always bound to happen, but a sound system will always know how to detect the Error, omit it and resend the rectified data. CAN bus in similar manner experiences such errors but fights them effectively.
Before we begin let’s understand the Data frame of the CAN bus:

A more detailed version of the Standard CAN data frame helps one understand how error bits are located and worked upon. Here the placement of Delimiter bits has been specified.

Delimiter Bit: these are recessive bits that usually serve to provide time/space for completing a particular action. These bits ensure that there are bit transitions in the fields that do not have bit-stuffing applied. The bit transitions are necessary to recover timing synchronization that might not be otherwise available due to NRZ encoding. Other than providing the time for synchronization, the delimiter serves a specific purpose in Error Detection. The delimiter bits must come at a predefined place so that the form of the CAN frame is maintained.
CRC Delimiter: a CRC delimiter bit gives time or space to the ECU to calculate the CRC.
ACK Delimiter: once the data is received, the receiving end sends an acknowledgement to the transmitting node, and it requires some time, and hence ACK delimiter is used.
Bit Stuffing: after transmitting five consecutive bits of the same level by a node, it adds a sixth bit of the opposite level to the outgoing bitstream. The receiver removes this extra bit. This not only avoids excessive DC components on the Bus but also enables receivers to detect errors. Since this is a general rule, the receiver doesn’t need extra information about the location of the stuffing bits to do the de-stuffing. Bit stuffing does not ensure that transmission errors do not corrupt the data; it ensures that the transmission starts and ends at the correct places.
CAN Bus Errors
Namely, five different types of errors may affect the transmission of bits over a CAN bus.
-
Bit Error: When the bit received is not the same as the bit transmitted. Every node that receives the data reads it bit-by-bit from the Bus and compares the transmitted bit value with the received. If the bit transmitted and the bit received are not of the same value, a «bit error» occurs.
-
Stuff Error: Following the bit stuffing process, if more than five consecutive bits of the same level occur on the Bus, a «Stuff Error» is signalled.
-
Form Error: this refers to the fixed form of the field. Form check checks the CAN frame sent/received for a standard format. Violation of fixed bit format results in a Form Error. E.g. CRCD, ACKD, EOF have to be recessive bits, and the presence of any dominant bit will automatically be treated as a Form Error. Also, delimiter bits must come at a predefined place so that the form of the CAN frame is maintained; if the receiver fails to find delimiter bits at a proper place, this also generates a Form Error Frame. In this case, the fixed forms of the fields will have to be retransmitted.
-
CRC Error: The transmitting node send a 15 bit CRC value onto the Bus. The receiving node then calculates a 15-bit number based on the payload it receives on its own. Then it compares it to the CRC delimiter it received as part of the message. If the received CRC does not match with the calculated code, the receiver knows that the 8 bytes of the payload were corrupted or modified during transmission, known as CRC Error.
-
ACK Error: The ACK bit is a defined recessive «1» (transmitted by the transmitter node), and the reply from the receiver is a defined dominant «0». But, if that is not the case and the transmitter does not receive a dominant acknowledgement bit in reply, it is termed ACK Error.
Below is the ASAM standard table for CAN error:

Error Frame Format
When a node detects an error in a message, a special message known as an «error frame» is transmitted. This special message violates the formatting rules of a CAN message and causes all other nodes (connected on the network) to send an error frame as well. This intentional violation of the CAN standard (i.e. the sending of 6 dominant bits) guarantees the destruction of a faulty data or remote frame. Thus, enabling the original transmitter to retransmit the message automatically.

Error Frame consists of «6» dominant or recessive bits, depending upon the error state of the node which transmits it. It is transmitted by the node/s that detect/s any communication error, resulting in an immediate termination of transmission, and is retransmitted later. Again, this is all controlled by a controller, not application software.
Error Flag: Every CAN controller along a bus tries to detect errors within a message as error handling is built into the CAN protocol. Every CAN controller along a bus will try to detect errors within a message. If an error is found, the discovering node transmits an Error Flag, thus destroying the bus traffic. Using the error counters, a CAN node can detect faults and perform error confinement.
Error States of CAN Bus
Depending on the specific error count, a CAN controller handles the switching of the error state.

Error Active
A node starts in Error Active mode. CAN controller assumes the normal state Error Active. In this state, the CAN controller sends six dominant bits after detecting an error. When the limit is below TEC[NM1] (Transmit Error Counter) <127 and REC (Receive Error Counter) <127, an Error Active node will transmit Active Error Flags when it detects errors.
Error Passive
The Error Passive state indicates a detected error by sending six homogeneous recessive bits only. This prevents the error-detecting receivers from globalizing detected errors. When any one of the two Error Counters raises above 127(TEC>127 and REC>127), the node will enter a state known as Error Passive.

In addition, when sending two consecutive data or remote frames, CAN controllers that are in the «Error Passive» state must wait the «Suspend Transmission Time» (8 bits). An Error Passive node will transmit Passive Error Flags when it detects errors.
Bus Off
When the Transmit Error Counter raises above 255(TEC>255 and REC>255), the node will enter the Bus Off state. It happens when the CAN controller fails or at times of extreme accumulations of errors. In this case, the CAN controller disconnects itself from the CAN bus. As a result, that particular CAN node will get switched off from the CAN network; Resulting in no communication at all.
«Influx data loggers’ supports CAN error Logging in ASAM standard format.» It makes sure that your data log is checked for these errors and quality data is delivered. Your data is essential. The CAN error logging functionality on Influx Devices is tested and benchmarked with other industry-leading CAN devices. For more information about the product, please visit:
Controller Area Network или, как более привычно звучит для автомобильной диагностики — CAN шина
* Что такое CAN?
* Взаимосвязь открытых систем (Open System Interconnection (OSI))
* Controller Area Network (CAN)
* Основные принципы CAN
* Как выглядит CAN шина на примере автомобилей произведённых в Японии
Парк автомобилей на наших улицах стремительно омолаживается и вместе с этим приходится осваивать и решать новые задачи связанные с диагностикой и ремонтом. Всё чаще и чаще сталкиваешься в своей повседневной работе с проблемами коммуникации между различными бортовыми системами автомобиля. Если ещё несколько лет назад приезжающие на диагностику автомобили с ошибками по CAN шине (первый символ в классификации диагностического кода неисправности — U) были редкими гостями, то сейчас это практически повседневная практика. Информация на эту тему в принципе доступна и её достаточно много, даже очень много — что с одной стороны хорошо, а с другой представляет собой определённую сложность в поиске необходимой информации. Этой статьёй хотелось бы в первую очередь дать общее представление о системе CAN (Controller Area Network) тем, кто только начинает с ней знакомство, и тем, кто желает в этом поглубже разобраться.
Что такое CAN?
Controller Area Network — это понятие вошло в обиход после того, как в начале 1980-х годов в Robert Bosch GmbH разработали стандарт промышленной сети, ориентированный прежде всего на объединение в единую сеть различных исполнительных устройств и датчиков. Одно их первых внедрений в автомобильной промышленности было осуществлено на нескольких моделях автомобилей Mercedes-Benz в 1992 году. До этого момента электронное управление исполнительными функциями строилось по системе — один блок управления принимал электронные сигналы с различных датчиков и после их обработки посылал соответствующие команды на исполнительные устройства (такие как бензонасос, форсунки, катушки зажигания и прочие…). Увеличение объёма функций управления автомобилем, передаваемое электронике, привело к появлению таких дополнительных систем как ABS, SRS, AT, Immobilaser и других… Совмещение этих функций в одном ЭБУ привело бы к его громоздкости и чрезмерной сложности, а так же к потере надёжности, когда выход из строя одной системы мог бы привести к потере управляемости всего автомобиля. Поэтому автопроизводители пошли по пути разделения функций управления и выделения всех систем в отдельные блоки. А для того, чтобы увязать все системы в единое целое для решения общих задач управления автомобилем, на помощь пришёл коммуникационный стандарт CAN от Robert Bosch GmbH и это всё шире и шире стало применяться в автомобилестроении. На сегодняшний день практически каждый новый автомобиль оснащён этой системой.
Всё в принципе просто и понятно, но как устроена CAN шина и на чём основывается принцип её работы? Вот один из примеров взаимосвязи электронных блоков управления и устройств завязанных в единую бортовую коммуникационную сеть автомобиля,- рис. 1
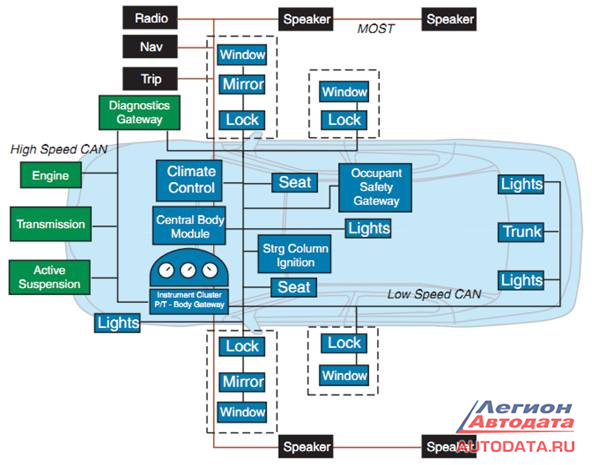
Здесь мы рассматриваем только блоки, связанные в проводную сеть, но в автомобилях 21 века находит всё большее применение и беспроводная передача информации. К примеру, система навигации, слежение за местонахождением автомобиля (защита от угона), контроль за давлением в шинах, удалённая диагностика и многие другие. В ближайшем будущем можно ожидать, что слияние воедино в бортовой сети автомобилей внутренних и внешних информационных потоков выведет управление транспортным средством на новый уровень безопасности и комфорта прежде всего в таких направлениях, как отображение информации предупреждения об опасных ситуациях на дорогах и даже активного смягчения последствий возможных столкновений автомобилей, а так же более рационального распределения транспортных потоков.
Немного предыстории — Взаимосвязь открытых систем (Open System Interconnection (OSI)).
Это очевидно, что если два или более микропроцессора взаимосвязаны в одну систему, то должен использоваться стандартный протокол который определяет, каким образом данные должны быть переданы между сетевыми блоками. Наиболее распространенным примером такого протокола является TCP/IP (Transmission Control Protocol / Internet Protocol), который используется для подключения хостингов в сети Интернет. Предшественником TCP/IP был протокол — Open System Interconnection (OSI). Этот протокол был разработан в 1982 году Международным бюро по стандартизации International Organization for Standardization (ISO 7498-1:1994 (E)). OSI протокол иногда называют как «семиуровневая» модель, поскольку он состоит из семи независимых элементов, которые определяют требования к взаимосвязи на различных уровнях взаимодействия.
Вот эти семь уровней:
1) Уровень приложений (Application Layer) — этот уровень определяет какие приложения (программы) имеют доступ к сети. Например — электронная почта, передача файлов, терминалы удалённого доступа и веб-браузеры.
2) Уровень представления данных (Presentation Layer) — этот уровень определяет такие моменты, как стандарты сжатия данных и их шифрования.
3) Уровень передачи данных (Transport Layer) — этот уровень обеспечивает стандарты передачи данных между адресатами, осуществляет контроль ошибок и безопасности.
4) Сетевой уровень (Network Layer) — этот уровень отвечает за вопросы маршрутизации сетевого трафика данных.
5) Уровень каналов связи (Data Link Layer) — этот уровень обеспечивает синхронизацию передачи данных и контроль ошибок.
6) Уровень контроля за сеансами связи (Session Layer) — этот уровень обеспечивает стандартизацию начала и завершения сеансов связи между различными приложениями и сетевыми блоками.
7) Физический уровень (Physical Layer) — этот уровень определяет стандарты физических характеристик устройств в сети, в том числе типы соединений и разъёмов, электрические характеристики кабелей, уровня напряжения, силы тока и тд.
Но задачи, решаемые протоколом OSI не в полной мере отвечали нуждам автомобильной электроники, и как следствие этого, инженерами Robert Bosch GmbH был разработан, в развитие протокола OSI, специальный протокол CAN, который определял стандарты физического и канального уровней модели OSI в кремнии для осуществления последовательной передачи информации между двумя или более устройствами.
Controller Area Network (CAN)
CAN был разработан Robert Bosch GmbH для автомобильной промышленности в начале 1980-х годов и официально публично выпущен в пользование в 1986 году. Эта разработка CAN от Bosch была принята в качестве стандарта ISO (ISO 11898), в 1993 переименована в CAN 2.0A, и расширена в 1995 году, чтобы позволить идентифицировать большее количество сетевых устройств в CAN 2.0B. Как правило, CAN шина соединяет в сеть модули (или узлы), используя два провода, витая пара. Многие компании и не только автомобильные, внедряют CAN протокол в свои разработки для взаимосвязи различных электронно-управляемых устройств. В неофициальной классификации устройства связанные протоколом CAN и имеющие процессоры серии MPC 5xx, называются TouCAN модули; имеющие процессоры серии MPC 55xx называются FlexCAN модули. CAN — последовательный, мульти-отправляющий, многоадресный протокол, это означает, что, когда шина свободна, любой узел, может отправить сообщение (мульти-отправляющее устройство), и все узлы могут получить и отреагировать на сообщение (многоадресно передано). Узел, который инициирует сообщение, называют передатчиком, любой узел не отправляющий сообщение называют получателем. Всем сообщениям присвоены статические приоритеты, передающий узел остаётся передатчиком до тех пор пока шина не станет неактивной или пока в сети не появилось сообщение от другого узла с более высоким приоритетом, процесс который определяет приоритет сообщений и называется — арбитраж. Сообщение по CAN шине может содержать до 8 байтов данных. Идентификатор сообщения описывает контент данных и используется получающими узлами для определения места назначения в сети (другими словами — адресата, узел которому это сообщение адресовано). В коротких сетях (≤ 40 м), скорость передачи сообщений может достигать до 1 Мбит/с. Более длинные сетевые расстояния уменьшают доступную скорость передачи, например до 125 Кбит/с в сети длиной до 500м. Высокоскоростной CAN (“High speed” CAN) сетью, считается сеть со скоростью передачи данных более 500 Кбит/с.
Основные принципы CAN
Детали спецификации CAN протокола полностью описаны в Robert Bosch GmbH, “CAN Specification 2.0,” 1991. Ознакомиться с документом в формате PDF можно по следующему адресу. Далее я дам максимально возможно краткое описание того как данные передаются по CAN, как структурированы сообщения CAN и как обрабатываются ошибки передачи сообщений.
Есть четыре типа сообщений CAN, или фреймы (frames): фрейм данных (Data Frame), удаленный фрейм (Remote Frame), ошибочный фрейм (Error Frame) и фрейм перегрузки (Overload Frame).
Data Frame — стандартное сообщение CAN, широковещательно передаваемые данные от передатчика на другие узлы сети.
Remote Frame — широковещательно передаваемое передатчиком сообщение, на запрос данных от конкретного узла сети.
Error Frame — может быть передан любым узлом, который обнаруживает ошибку в сети.
Overload Frame — используются как запрос на предоставление дополнительной паузы между получаемыми данными (Data Frame) или запросами на получение данных (Remote Frame).
Ниже проиллюстрированы различия между Data Frames для стандартов CAN 2.0A и CAN 2.0B,- рис. 2
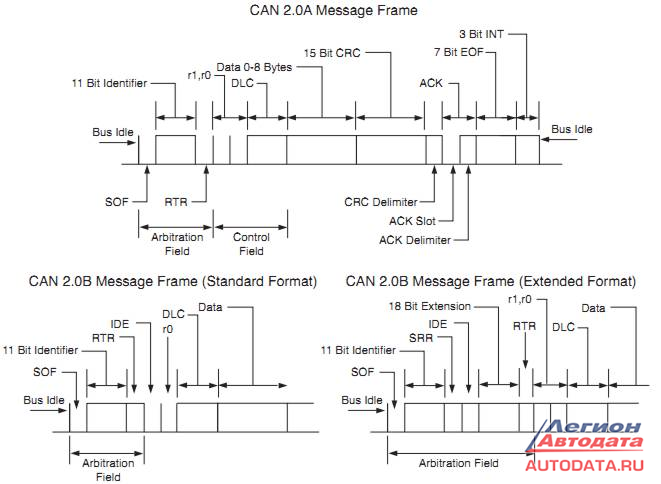
Различие между форматами CAN 2.0А и CAN 2.0B заключаются в том что фрейм данных для CAN 2.0B поддерживает как стандартный идентификатор фрейма данных — 11 бит, так и расширенный идентификатор фрейма данных — о 29 бит. Фреймы стандартного и расширенного формата могут без проблем передаваться по одной на той же шине, и даже иметь в цифровой форме эквивалентный идентификатор.
В этом случае у стандартного фрейма будет более высокий приоритет,- рис. 3
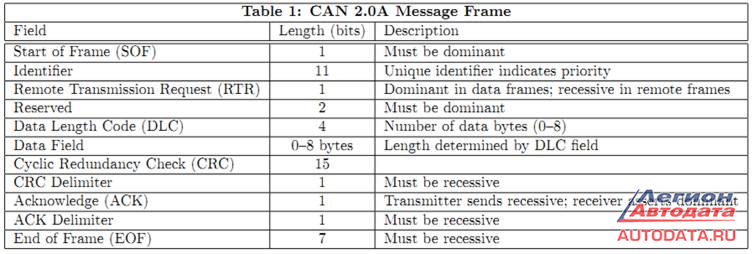
Описание фрейма сообщения стандарта CAN 2.0А
Начало сообщения (Start of Frame (SOF)) — 1 бит, должен быть доминантным.
Идентификатор (Identifier) — 11 бит, уникальный идентификатор, указывает приоритет.
Удаленный запрос на передачу (Remote Transmission Request (RTR)) — 1 бит, доминантный в сообщении и рецессивный в запросе на передачу сообщения.
Резерв (Reserved) — 2 бита, должны быть доминантными.
Длина кода данных (Data Length Code (DLC)) — 4 бита, количество байтов данных (0-8).
Поле передаваемых данных (Data Field) — от 0 до 8 байт, размер определен в поле DLC.
Контрольный циклический избыточный код (Cyclic Redundancy Check (CRC)) — 15 бит.
Разделитель CRC — 1 бит, должен быть рецессивный.
Подтверждение (Acknowledge (ACK)) — 1 бит, передатчик отправляет рецессивный; получатель подтверждает доминантным.
Разделитель ACK — 1 бит, должен быть рецессивным.
Завершение сообщения (End of Frame (EOF)) — 7 бит, должны быть рецессивными,- рис. 4
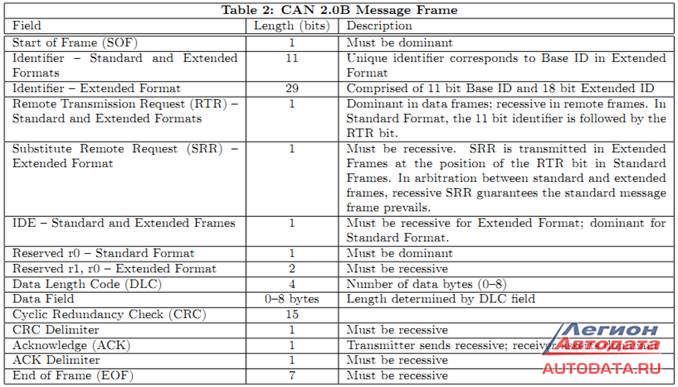
Описание фрейма сообщения стандарта CAN 2.0В
Начало сообщения (Start of Frame (SOF)) — 1 бит, должен быть доминантным.
Идентификатор стандартного и расширенного форматов (Identifier) — 11 бит, уникальный идентификатор, соответствует базовому ID в расширенном формате.
Идентификатор расширенного формата (Identifier – Extended Format) — 29 бит, состоит из 11 бит базового ID и 18 бит расширенного ID.
Удаленный запрос на передачу (Remote Transmission Request (RTR)) стандартный и расширенный форматы — 1 бит, доминантный в сообщении и рецессивный в запросе на передачу сообщения. В стандартном формате 11 бит идентификатора следуют за битом RTR.
Замещение удалённого запроса (Substitute Remote Request (SRR)). Для расширенного формата — 1 бит, должен быть рецессивный. SRR передаются в расширенных форматах сообщений на позиции бита RTR в стандартном сообщении. В арбитраже между стандартными и расширенными сообщениями, рецессивные SRR обеспечивает приоритет стандартным сообщениям.
Поле IDE – для стандартного и расширенного форматов — 1 бит, должен быть рецессивным для расширенного формата и доминантным для стандартного.
Резерв (Reserved r0) для стандартного формата — 1 бит, должен быть доминантным.
Резерв (Reserved r1, r0) для расширенного формата — 2 бита, должны быть рецессивными.
Длина кода данных (Data Length Code (DLC)) — 4 бита, количество байтов данных (0-8).
Поле передаваемых данных (Data Field) — от 0 до 8 байт, размер определен в поле DLC.
Контрольный циклический избыточный код (Cyclic Redundancy Check (CRC)) — 15 бит.
Разделитель CRC — 1 бит, должен быть рецессивный.
Подтверждение (Acknowledge (ACK)) — 1 бит, передатчик отправляет рецессивный; получатель подтверждает доминантным.
Разделитель ACK — 1 бит, должен быть рецессивным.
Завершение сообщения (End of Frame (EOF)) — 7 бит, должны быть рецессивными.
Фрейм данных CAN
Фрейм данных CAN состоит из семи полей: Начало фрейма (SOF), арбитраж, управление, данные, цикличные, проверка по избыточности (CRC), подтверждение (ACK) и конец фрейма (EOF). Биты сообщения CAN обозначены как «доминирующие» (0) или «рецессивные» (1). Поле SOF состоит из одного доминирующего бита. Все сетевые узлы синхронно ожидают команды разрешения на передачу сообщений и начинают передавать одновременно. Арбитражная схема определяет, какой из узлов, пытающихся передавать сообщения имеет главный приоритет и фактически будет управлять шиной.
Арбитраж (Arbitration)
Арбитражное поле сообщения CAN состоит из 11-или 29-разрядного идентификатора и бита удаленной передачи (RTR). Арбитражную схему CAN называют “носителем контроля с множественным доступом и обнаружением коллизий” или CSMA/CD, которая гарантирует, что самое важное сообщение с наивысшим приоритетом будет передано по всей сети в первую очередь. Приоритет сообщения определен численным значением идентификатора в арбитражном поле, поле с самым низким численным значением имеет самый высокий приоритет. Неразрушающий, интеллектуальный арбитраж разрешает конфликты среди конкурирующих передатчиков. Это означает, что шина может считаться действующей как логический элемент И (AND gate). Если какой-либо узел пишет по сети доминантный признак (0), то каждый узел читает доминирующий бит независимо от его назначения, заданного передающим узлом. Каждый передающий узел всегда читает ответ на каждый переданный бит. Если узел передает рецессивный бит запроса на отправку сообщения и получает доминирующий бит для прочтения сообщения, он сразу же прекращает передавать.
Ниже проиллюстрирован приоритет сетевого арбитража где третий узел имеет высший приоритет и первый низший,- рис. 5
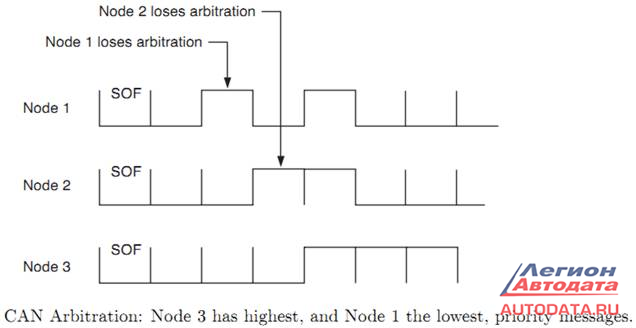
Бит RTR включён для того чтобы различать сообщения для передачи и удаленные запросы на приём сообщений. В стандартных сообщениях для передачи (Data Frame) бит RTR должен быть доминантным, а в удаленных запросах на приём сообщений (Remote Frame) должен быть быть рецессивным.
Контрольное поле и поле данных в сообщении (Control and Data Fields)
Поле управляющее длиной кода данных (DLC) состоит из 6 бит (из которых используются только 4 младших бита), они показывают количество данных в сообщении. Поскольку только до 8 байт данных может быть отправлено в одном сообщение, поле DLC может принимать значения в диапазоне от 000000 до 000111. Данные которые должны быть переданы содержатся только в поле данных. В первую очередь передается наиболее значимый байт (Most significant byte (MSB)) из байтов данных.
Обработка ошибок (Error Handling)
В протоколе CAN реализовано пять уровней обнаружения ошибок. На уровне сообщений, выполняется циклическая проверка избыточности (Cyclic Redundancy Check (CRC)), проверки сообщения и обязательное подтверждение проверок (Acknowledge (ACK)). Бит проверки уровней состоит из монитора и наполнения.
Циклические ошибки избыточности обнаруживаются, используя код CRC размером 15 битов, вычисленный передатчиком из контента сообщения. Каждый получатель, принимающий сообщение, повторно вычисляет код CRC и сравнивает его с переданным значением. Несоответствие между этими двумя вычислениями заставляет установить флаг (flag) ошибки. Проверяемые сообщения, в которых будет установлен флаг ошибки, это обнаружение получателем недопустимого бита в разделителе CRC, разделителе ACK, в завершении сообщения EOF или в 3-х битном разделяющим сообщения пространстве. В конечном итоге каждый принимающий узел записывает доминантный бит в ячейку разделителя ACK, которая затем читается отправившим это сообщение узлом. И если приём сообщения получателем не подтверждён (возможно потому что получающий узел перестал работать) то устанавливается флаг ошибки подтверждения (ACK).
На уровне битов мы уже отметили, что каждый переданный бит считывается снова передатчиком этого сообщения при контроле подтверждения о получении сообщения, присланного получателем. Если контролируемое значение отличается от отправленного, значит на уровне битов обнаружена ошибка. Дополнительно, ошибки на уровне битов обнаруживаются при помощи «вставок»: После пяти последовательных идентичных битов, которые передаются в сообщении следует «вставка», бит противоположной полярности вставляется передатчиком в поток передаваемых битов (биты «вставки» вставляются в сообщение от поля SOF до поля CRC). Получатели автоматически проверяют сообщение на наличие «вставок». Если любой из принимающих узлов сети обнаруживает в полученном сообщении шесть последовательных идентичных битов, то фиксируется ошибка (отсутствия «вставки»). В дополнение для обнаружения ошибок, «вставки» гарантируют, что есть достаточно не нулевых окончаний в потоке битов (non-return to zero (NRZ)), чтобы поддержать синхронизацию.
Сообщение об ошибке (The CAN Error Frame)
Если передающий или принимающий узел обнаруживает ошибку, он немедленно прерывает приём или передачу текущего сообщения. Сообщение об ошибке называемое «флаг» ошибки, составляется из шести доминантных битов и разделителя сообщения об ошибке состоящего из восьми рецессивных битов. Так как эта строка битов нарушает правило «вставок», все другие узлы также передают сообщение об ошибке. После критичного количества обнаруженных ошибок, узел в конце концов само-отключается. Надежность, особенно в производстве и автомобильной электронике, где применяется технология CAN, требует, чтобы сеть могла отделять случайные ошибки (из-за скачков напряжения, шумов или других временных причин) от постоянных, являющихся причиной неисправности узла из-за дефектов в оборудовании. Следовательно, узлы хранят и отслеживают число обнаруженных ошибок. Узел может быть в одном из трех режимов в зависимости от количества зафиксированных ошибок:
Если количество зафиксированных ошибок в каждом буфере передачи или приёма соответствующего узла, больше чем нуль и меньше чем 128, узел считается «активным с ошибкой» (“error active”), указывая на то, что несмотря что узел остается полностью функциональным, по крайней мере одна ошибка была обнаружена.
Если количество зафиксированных ошибок между 128 и 255, то узел переходит в «пассивный с ошибками» (“error passive”) режим. В «пассивном с ошибками» режиме узел будет передавать на более медленном уровне, отправляя 8 рецессивных битов прежде чем снова отправить сообщение, распознав что шина свободна.
Если количество зафиксированных ошибок более 255, то узел переходит в режим «отключен от сети» (“busoff”), отключив себя самостоятельно.
Ошибка при получении добавляет в общее количество учтённых ошибок 1, ошибка при передаче добавляет в общее количество учтённых ошибок 8. Последующие безошибочные сообщения постепенно уменьшают количество учтённых ошибок на 1, за каждое безошибочное сообщение. Если общее количество учтённых ошибок возвращается к нулю, узел возвращается в нормальный режим функционирования. Узел в находящийся режиме “busoff” может перейти в режим “error active” после 128 входов в сеть из 11 последовательных рецессивных битов, которые были проконтролированы. Сообщение считается безошибочным, если передающий узел не нашёл в нём ошибок вплоть до поля EOF. Повреждённые сообщения отсылаются повторно сразу как только шина становится свободной.
Запрос данных от конкретного узла сети (The CAN Remote Frame)
Узел, которому необходимы данные от другого узла сети, может запросить передачу таких данных, отправив соответствующий запрос на получение данных (Remote Frame). Например, микропроцессору управления центральным замком на вашем автомобиле необходимо знать положение селектора коробки передач от ЭБУ трансмиссии (является ли он в положении «паркинг»). Структура запроса на получение данных аналогична структуре стандартного сообщения только без поля данных (data field) и с рецессивным RTR битом.
Запрос на предоставление дополнительной паузы между получаемыми данными и свободное пространство между сообщениями (Overload Frames and Interframe Space)
Если какой-либо узел сети будет получать сообщения быстрее, чем он может их обработать, то будет сгенерирован запрос на предоставление дополнительной паузы между получаемыми данными (Overload Frames) чтобы обеспечить дополнительное время между принимаемыми данными или запросами на получение сообщений (Remote Frame). Подобно сообщению об ошибке, Overload Frame имеет два поля с битами: flag перегрузки состоящий из шести доминирующих битов и разделитель перегрузки, состоящий из восьми рецессивных битов. В отличие от сообщений об ошибке, суммарный подсчёт Overload Frames не ведётся.
Пространство между сообщениями состоит из трех рецессивных битов так же, как и время простоя шины между сообщениями или удаленными запросами на передачу. Во время перерыва никакому узлу не разрешают инициировать передачу (если доминирующий бит будет обнаружен во время Перерыва, то Overload Frame будет сгенерирован). Время простоя шины длится, пока у узла нет чего-то для передачи, а когда начинается передача, то в этот момент появление доминирующего бита на шине сигнализирует о начале передачи сообщения SOF.
Загрузка шины (Bus Loading)
CAN обеспечивает устойчивое, простое и гибкое сетевое решение для производственных, автомобильных и многих других приложений. Главный недостаток протокола CAN — что задержка сообщения не является определённой (из-за существования Error Frames, Overload Frames и повторных передач), и увеличения задержки ведёт к увеличению сетевого трафика. В целом использование шины не должно превышать 30% от максимальной мощности шины и гарантировать, что низкоприоритетные сообщения не испытывают недопустимую задержку. Использование шины определено как деление двух величин — общее количество использованных для передачи битов поделённое на общее максимально доступное количество для передачи битов , и вычисляется следующим образом:
Шаг 1 — Выбирается единица времени ≥ самого медленное зафиксированного периодического сообщение в сети (обычно 1 секунда).
Шаг 2 — Определяются все периодические сообщения.
Шаг 3 — К каждому из этих сообщений приблизительно одинакового размера, добавляются 47 служебных бит (размер служебных полей данных — SOF + Arbitration + RTR + Control + CRC + Acknowledgment + EOF +
Interframe Space = 1 + 11 + 1 + 6 + 16 + 2 + 7 + 3 = 47 bits).
Шаг 4 — Рассчитывается количество бит используемых в сообщениях путем умножения размера сообщения в битах на количество передач выполняемых в единицу времени.
Шаг 5 — Суммирование всех битов используемых в переданных сообщениях для оценки общего объёма сетевого трафика. Умножение этой величины на страховочный коэффициент 1.1 для получения наихудшего прогноза сетевого трафика.
Шаг 6 — В завершении, поделите общее количество использованных для передачи битов на общее максимально доступное количество для передачи битов (например, 125 Кбит/с или 500 Кбит/с умножаются на единицу времени) для получения предполагаемого процента загрузки шины,- рис. 6
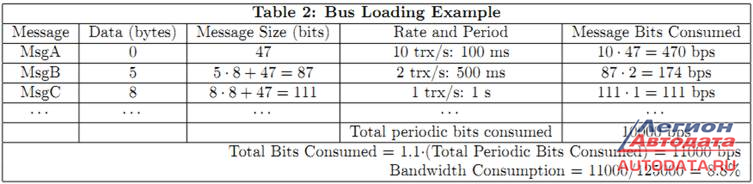
Протоколы синхронизированные по времени (Time-triggered Protocols)
Для контроля над сетью в реальном времени было бы желательно реализовать такой протокол связи, который гарантирует, что для сообщений выбираются крайние временные параметры независимо от нагрузки на шину. Пример такого протокола, который контролирует временной уровень связи CAN данных, это “time-triggered CAN,” или TTCAN (ISO 11898-4). TTCAN сообщения имеют два специальных типа, называемые «окна времени» (time windows): привилегированные окна времени (exclusive time windows), и арбитражные окна времени (arbitrating time windows). Еxclusive time windows прикреплены к специальным сообщениям, которые передаются периодически. Таким образом, Еxclusive time windows не конкурируют за доступ к шине. Аrbitrating time windows используются для сообщений не имеющих строгих ограничений по времени.
Аrbitrating time windows, как нормальные сообщения CAN, конкурируют за доступ к шине на основе приоритета через арбитраж. Тime-triggered CAN протокол, требует наличия в сети «главного узла» (master node), который периодически широковещательно передает сигнал времени сети (называемый глобальным временем (global time)) в специальном информационном сообщении. Для повышения отказоустойчивости в сети должны быть несколько потенциальных главных узлов. Если главный узел перестал работать (обнаружено отсутствие специального информационного сообщения), другие потенциальные главные узлы конкурируют за статус «главного узла» при помощи арбитража и новым «главным узлом» становится узел с самым высоким приоритетом. После этого новый главный узел начинает широковещательно передавать специальные информационные сообщения — global time. Тime-triggered CAN протокол не ретранслирует повреждённые сообщения, и при этом это не вызывает Error Frames.
У протокола TTCAN есть конкурирующий протокол FlexRay, разработанный консорциумом автомобильных производителей и поставщиков. Коммуникационное сообщение (фрейм) FlexRay состоит из периодических синициированных «статических» и «динамических» частей. Статический сегмент составлен из одинаковой длины временных интервалов, соответствующих соединенным в сеть узлам. Каждый узел передает свои сообщения синхронно в его зарезервированном слоте. Статический сегмент также передает «синхронизирующий» кадр, чтобы обеспечить глобальную переменную (timebase) для сети. В отличие от CAN, нет никакого арбитража для шины. Динамический сегмент — по существу механизм «опроса» где каждому узлу дают возможность поместить инициированное событие или асинхронное сообщение в шину в порядке приоритетов, используя механизм синхронизации «миниразделения на слоты». Для повышения отказоустойчивости, узлы сети использующей протокол FlexRay, могут быть связаны двумя шинами или каналами одновременно.
Ну вот, в принципе, вся основная информация о протоколе CAN, а теперь немного о том, как выглядит CAN шина на примере автомобилей произведённых в Японии. Сразу хочу отметить, что без надлежащего диагностического оборудования проводить диагностику и ремонт неисправностей CAN шины можно в очень ограниченном диапазоне. Всё сведётся к проверке физической целостности проводов, проверки состояния соединительных разъёмов, проверки сопротивления проводки и Terminal resistor, проверки соответствующего уровня напряжения на CANlow и CANhigh линиях. Применение в диагностике дилерского оборудования тоже лишь облегчит проверку и сузит круг поиска неисправности, с очень большой неохотой автопроизводители допускают контакт с программным обеспечением, своей интеллектуальной собственностью. В случае проблем на программном уровне возможно только перепрограммирование или замена соответствующего ЭБУ.
Пример CAN шины автомобиля Nissan 2007г.в. — Рис. 7
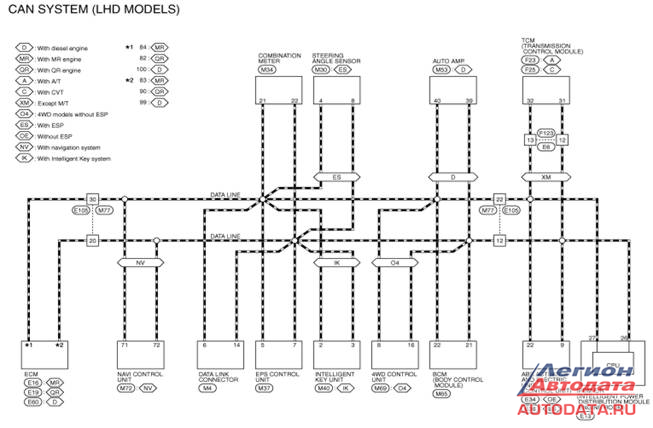
Интерфейс программы Consult III (Nissan), окно диагностики CAN шины,- рис. 8
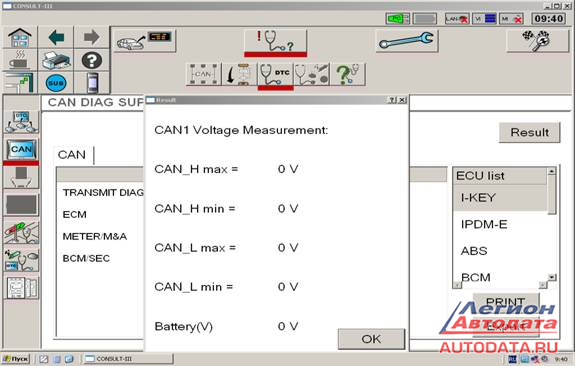
Пример CAN шины автомобиля Mitsubishi 2004г.в. – рис. 9
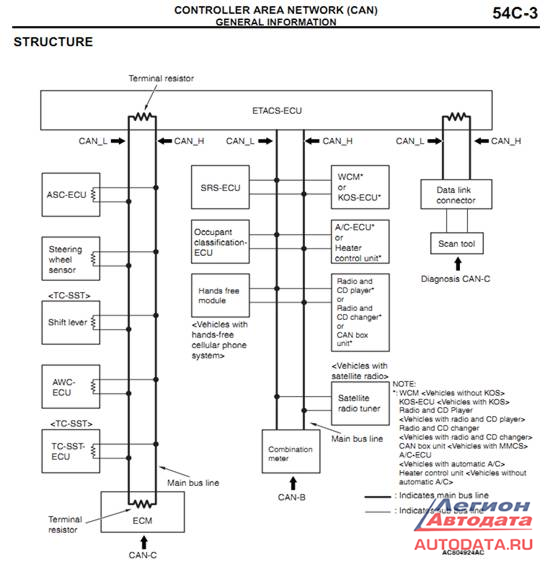
Пример CAN шины автомобиля Mazda 2004г.в. – рис. 10
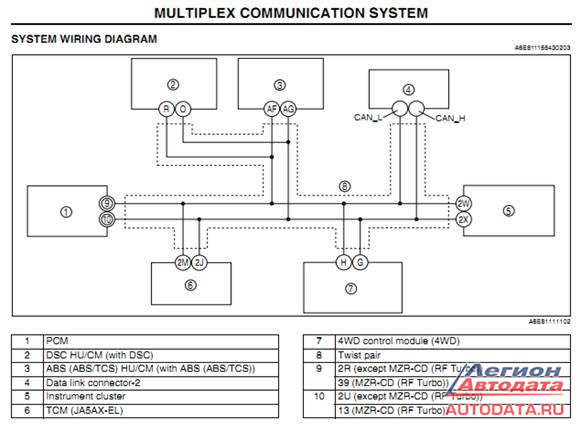
Пример CAN шины автомобиля Toyota 2007г.в. – рис. 11
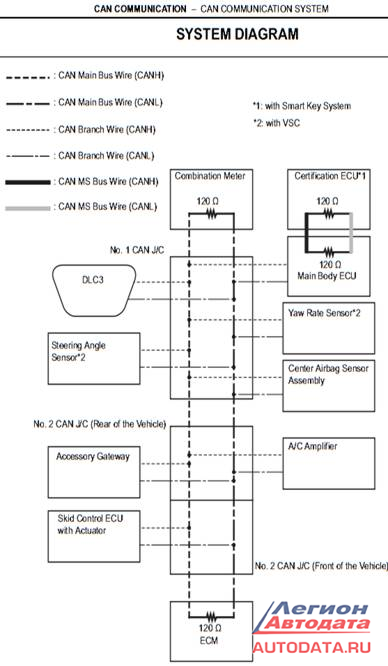
За дополнительной и полной информацией по системе каждого диагностируемого автомобиля следует обращаться к соответствующим документам автопроизводителей (WSM и TSB).
Удачных всем ремонтов и беспроблемного обслуживания своих автомобилей.
Задать вопрос или обсудить статью вы можете на форуме Легион-Автодата (нажать)
Боровиков Игорь Александрович
© Легион-Автодата
(ник на форуме Легион-Автодата – semirek)
СОЮЗ АВТОМОБИЛЬНЫХ ДИАГНОСТОВ
Автосервис «Япония Авто»
г. Калининград, ул.Портовая, 45
+7 [4012] 63 12 55, 65 60 99, +7(911) 475 9493
japanauto.ru /
Промышленная сеть реального времени CAN представляет собой сеть с общей средой передачи данных. Это означает, что все узлы сети одновременно принимают сигналы передаваемые по шине. Невозможно послать сообщение какому-либо конкретному узлу. Все узлы сети принимают весь трафик передаваемый по шине. Однако, CAN-контроллеры предоставляют аппаратную возможность фильтрации CAN-сообщений.
Каждый узел состоит из двух составляющих. Это собственно CAN контроллер, который обеспечивает взаимодействие с сетью и реализует протокол, и микропроцессор (CPU).
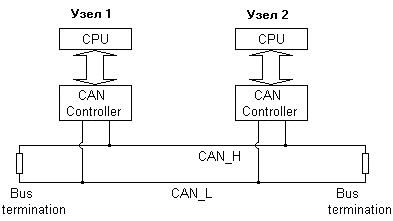 Рис. 1. Топология сети CAN.
Рис. 1. Топология сети CAN.
CAN контроллеры соединяются с помощью дифференциальной шины, которая имеет две линии — CAN_H (can-high) и CAN_L (can-low), по которым передаются сигналы. Логический ноль регистрируется, когда на линии CAN_H сигнал выше, чем на линии CAN_L. Логическая единица — в случае когда сигналы CAN_H и CAN_L одинаковы (отличаются менее чем на 0.5 В). Использование такой дифференциальной схемы передачи делает возможным работу CAN сети в очень сложных внешних условиях. Логический ноль — называется доминантным битом, а логическая единица — рецессивным. Эти названия отражают приоритет логической единицы и нуля на шине CAN. При одновременной передаче в шину лог. нуля и единицы, на шине будет зарегестрирован только логический ноль (доминантный сигнал), а логическая единица будет подавлена (рецессивный сигнал).
Типы сообщений сети CAN.
Данные в CAN передаются короткими сообщениями-кадрами стандартного формата. В CAN существуют четыре типа сообщений:
- Data Frame
- Remote Frame
- Error Frame
- Overload Frame
Data Frame — это наиболее часто используемый тип сообщения. Он состоит из следующих основных частей:
- поле арбитража (arbitration field) определяет приоритет сообщения в случае, когда два или более узлов одновременно пытаются передать данные в сеть. Поле арбитража состоит в свою очередь из:
- для стандарта CAN-2.0A, 11-битного идентификатора + 1 бит RTR (retransmit)
- для стандарта CAN-2.0B, 29-битного идентификатора + 1 бит RTR (retransmit)
Следует отметить, что поле идентификатора, несмотря на свое название никак не идентифицирует само по себе ни узел в сети, ни содержимое поля данных. Для Data кадра бит RTR всегда выставлен в логический ноль (доминантный сигнал).
- поле данных (data field) содержит от 0 до 8 байт данных
- поле CRC (CRC field) содержит 15-битную контрольную сумму сообщения, которая используется для обнаружения ошибок
- слот подтверждения (Acknowledgement Slot) (1 бит), каждый CAN-контроллер, который правильно принял сообщение посылает бит подтверждения в сеть. Узел, который послал сообщение слушает этот бит, и в случае если подтверждение не пришло, повторяет передачу. В случае приема слота подтверждения передающий узел может быть уверен лишь в том, что хотя бы один из узлов в сети правльно принял его сообщение.
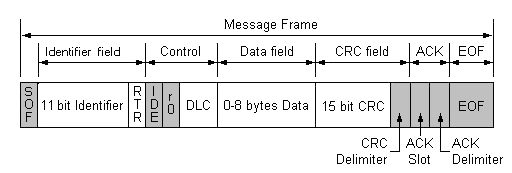 Рис. 2. Data frame стандарта CAN 2.0A.
Рис. 2. Data frame стандарта CAN 2.0A.
Remote Frame — это Data Frame без поля данных и с выставленным битом RTR (1 — рецессивные бит). Основное предназначение Remote кадра — это инициация одним из узлов сети передачи в сеть данных другим узлом. Такая схема позволяет уменьшить суммарный трафик сети. Однако, на практике Remote Frame сейчас используется редко (например, в DeviceNet Remote Frame вовсе не используется).
Error Frame — это сообщение которое явно нарушает формат солобщения CAN. Передача такого сообщения приводит к тому, что все узлы сети регистрируют ошибку формата CAN-кадра, и в свою очередь автоматически передают в сеть Error Frame. Результатом этого процесса является автоматическая повторная передача данных в сеть передающим узлом. Error Frame состоит из поля Error Flag, которое состоит из 6 бит одинакового значения (и таким образом Error frame нарушает проверку Bit Stuffing, см. ниже), и поля Error Delimiter, состоящее из 8 рецессивных битов. Error Delimiter дает возможность другим узлам сети обнаружив Error Frame послать в сеть свой Error Flag.
Overload Frame — повторяет структуру и логику работы Error кадра, с той разницей, что он используется перегруженным узлом, который в данный момент не может обработать поступающее сообщение, и поэтому просит при помощи Overload-кадра о повторной передаче данных. В настоящее время Overload-кадр практически не используется.
Контроль доступа к среде передачи (побитовый арбитраж).
Поле арбитража CAN-кадра используется в CAN для разрешения коллизий доступа к шине методом не деструктивного арбитража. Суть метода не деструктивного арбитража заключается в следующем. В случае, когда несколько контроллеров начинают одновременную передачу CAN кадра в сеть, каждый из них сравнивает, бит, который собирается передать на шину с битом, который пытается передать на шину конкурирующий контроллер. Если значения этих битов равны, оба контроллера передают следующий бит. И так происходит до тех пор, пока значения передаваемых битов не окажутся различными. Теперь контроллер, который передавал логический ноль (более приоритетный сигнал) будет продолжать передачу, а другой (другие) контроллер прервёт свою передачу до того времени, пока шина вновь не освободится. Конечно, если шина в данный момент занята, то контроллер не начнет передачу до момента её освобождения.
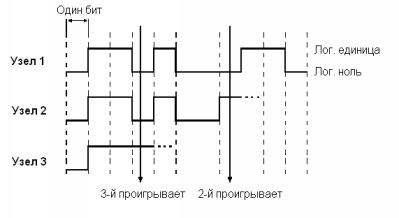 Рис. 3. Побитовый арбитраж на шине CAN.
Рис. 3. Побитовый арбитраж на шине CAN.
Методы обнаружения ошибок.
CAN протокол определяет пять способов обнаружения ошибок в сети:
- Bit monitoring
- Bit stuffing
- Frame check
- ACKnowledgement Check
- CRC Check
Bit monitoring — каждый узел во время передачи битов в сеть сравнивает значение передаваемого им бита со значением бита которое появляется на шине. Если эти значения не совпадают, то узел генерирует ошибку Bit Error. Естественно, что во время арбитража на шине (передача поля арбитража в шину) этот механизм проверки ошибок отключается.
Bit stuffing — когда узел передает последовательно в шину 5 бит с одинаковым значением, то он добавляет шестой бит с противоположным значением. Принимающие узлы этот дополнительный бит удаляют. Если узел обнаруживает на шине больше 5 последовательных бит с одинаковым значением, то он генерирует ошибку Stuff Error.
Frame Check — некоторые части CAN-сообщения имеют одинаковое значение во всех типах сообщений. Т.е. протокол CAN точно определяет какие уровни напряжения и когда должны появляться на шине. Если формат сообщений нарушается, то узлы генерируют ошибку Form Error.
ACKnowledgement Check — каждый узел получив правильное сообщение по сети посылает в сеть доминантный (0) бит. Если же этого не происходит, то передающий узел регистрирует ошибку Acknowledgement Error.
CRC Check — каждое сообщение CAN содержит CRC сумму, и каждый принимающий узел подсчитывает значение CRC для каждого полученного сообщения. Если подсчитанное значение CRC суммы, не совпадает со значением CRC в теле сообщения, принимающий узел генерирует ошибку CRC Error.
Механизм ограничения ошибок (Error confinement).
Каждый узел сети CAN, во время работы пытается обнаружить одну из пяти возможных ошибок. Если ошибка обнаружена, узел передает в сеть Error Frame, разрушая тем самым весь текущий трафик сети (передачу и прием текущего сообщения). Все остальные узлы обнаруживают Error Frame и принимают соответствующие действия (сбрасывают принятое сообщение). Кроме того, каждый узел ведет два счетчика ошибок: Transmit Error Counter (счетчик ошибок передачи) и Receive Error Counter (счетчик ошибок приема). Эти счетчики увеличиваются или уменьшаются в соответствие с несколькими правилами. Сами правила управления счетчиками ошибок достаточно сложны, но сводятся к простому принципу, ошибка передачи приводит к увеличению Transmit Error счетчика на 8, ошибка приема увеличивает счетчик Receive Error на 1, любая корректная передача/прием сообщения уменшают соответствующий счетчик на 1. Эти правила приводят к тому, что счетчик ошибок передачи передающего узла увеличивается быстрее, чем счетчик ошибок приема принимающих узлов. Это правило соответствует предположению о большой вероятности того, что источником ошибок является передающий узел.
Каждый узел CAN сети может находится в одном из трех состояний. Когда узел стартует он находится в состоянии Error Active. Когда, значение хотя бы одного из двух счетчиков ошибок превышает предел 127, узел переходит в состояние Error Passive. Когда значение хотя бы одного из двух счетчиков превышает предел 255, узел переходит в состояние Bus Off.
Узел находящийся в состоянии Error Active в случае обнаружения ошибки на шине передает в сеть Active Error Flags. Active Error Flags сотстоит из 6 доминантных бит, поэтому все узлы его регистрируют. Узел в состоянии Passive Error передает в сеть Passive Error Flags при обнаружении ошибки в сети. Passive Error Flags состоит из 6 рецессивных бит, поэтому остальные узлы сети его не замечают, и Passive Error Flags лишь приводит к увеличению Error счетчика узла. Узел в состоянии Bus Off ничего не передает в сеть (не только Error кадры, но вообще никакие другие).
Адресация и протоколы высокого уровня
В CAN не существует явной адресации сообщений и узлов. Протокол CAN нигде не указывает что поле арбитража (Identification field + RTR) должно использоваться как идентификатор сообщения или узла. Таким образом, идентификаторы сообщений и адреса узлов могут находится в любом поле сообщения (в поле арбитража или в поле данных, или присутствовать и там, и там). Точно также протокол не запрещает использовать поле арбитража для передачи данных.
Утилизация поля арбитража и поля данных, и распределение адресов узлов, идентификаторов сообщений и приоритетов в сети является предметом рассмотрений так называемых протоколов высокого уровня (HLP — Higher Layer Protocols). Название HLP отражает тот факт, что протокол CAN описывает только два нижних уровня эталонной сетевой модели ISO/OSI, а остальные уровни описываются протоколами HLP.
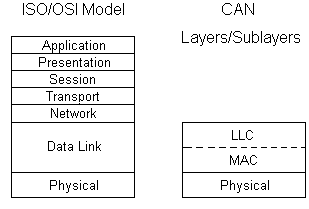 Рис. 4. Логическая структура протокола CAN.
Рис. 4. Логическая структура протокола CAN.
Существует множество таких высокоуровневых протоколов. Наиболее распространенные из них это:
- DeviceNet
- CAL/CANopen
- SDS
- CanKingdom
Физичекий уровень протокола CAN
Физический уровень (Physical Layer) протокола CAN определяет сопротивление кабеля, уровень электрических сигналов в сети и т.п. Существует несколько физических уровней протокола CAN (ISO 11898, ISO 11519, SAE J2411).
В подавляющем большинстве случаев используется физический уровень CAN определенный в стандарте ISO 11898. ISO 11898 в качестве среды передачи определяет двухпроводную дифференциальную линию с импедансом (терминаторы) 120 Ом (допускается колебание импеданса в пределах от 108 Ом до 132 Ом. Физический уровень CAN реализован в специальных чипах — CAN приемо-передатчиках (transceivers), которые преобразуют обычные TTL уровни сигналов используемых CAN-контроллерами в уровни сигналов на шине CAN. Наиболее распространенный CAN приемо-передатчик — Phillips 82C250, который полностью соответствует стандарту ISO 11898.
Махимальная скорость сети CAN в соответствие с протоколом равна 1 Mbit/sec. При скорости в 1 Mbit/sec максимальная длина кабеля равна примерно 40 метрам. Ограничение на длину кабеля связано с конечной скоростью света и механизмом побитового арбитража (во время арбитража все узлы сети должны получать текущий бит передачи одновременно, те сигнал должен успеть распространится по всему кабелю за единичный отсчет времени в сети. Соотношение между скоростью передачи и максимальной длиной кабеля приведено в таблице:
| скорость передачи | максимальная длина сети |
| 1000 Кбит/сек | 40 метров |
| 500 Кбит/сек | 100 метров |
| 250 Кбит/сек | 200 метров |
| 125 Кбит/сек | 500 метров |
| 10 Кбит/сек | 6 километров |
Разъемы для сети CAN до сих пор НЕ СТАНДАРТИЗОВАНЫ. Каждый протокол высокого уровня обычно определяет свой тип разъемов для CAN-сети.
По материалам компании Kvaser
Продолжение статьи I части.
Эта статья не претендует на полноту и абсолютную точность сведений, указанных в ней, и предназначена для ознакомления с протоколом CAN.
Содержание статьи
• Шина CAN – Введение.
• Сообщения CAN.
• Физические уровни CAN.
• Разъемы CAN.
• Тактовая синхронизация CAN.
• Обработка ошибок CAN.
Разъемы CAN
Для разъемов CAN стандартов не существует! Обычно, каждый (!) протокол более высокого уровня (Higher Layer Protocol) описывает один или несколько предпочтительных типов разъемов. Основные типы:
• 9–контактный DSUB, предложен CiA;
• 5–контактный Mini–C и/или Micro–C, используется DeviceNet и SDS;
• 6–контактный Deutsch разъем, предложенный CANHUG для транспортных гидравлических систем.
Разъемы CAN
Данное назначение контактов разъема рекомендовано CiA и фактически является промышленным стандартом.
| 1 | — | Резерв |
| 2 | CAN_L | Линия шины CAN_L (доминантная низкая) |
| 3 | CAN_GND | Заземление CAN |
| 4 | — | Резерв |
| 5 | (CAN_SHLD) | Опционально: экран CAN |
| 6 | (GND) | Опционально: заземление CAN |
| 7 | CAN_H | Линия шины CAN_H (доминантная высокая) |
| 8 | — | Резерв (линия ошибок) |
| 9 | CAN_V+ | Опционально: питание |
Для пользователей продукции KVASER: Пожалуйста заметьте, что специфическое употребление этих контактов в кабелях KVASER DRVcan описано в документе LAPcan Hardware Guide, который можно скачать на сайте компании.
Если питание подается, оно должно быть в диапазоне +7..+13 В, 100 мA. Модули оснащены разъемом типа «папа» и должны соединять внутри контакты 3 и 6.
Нумерация контактов действительна для разъема типа «папа„, при взгляде со стороны разъема, или для разъема типа “мама», при взгляде со стороны распайки. – Чтобы запомнить расположение контактов, заметьте, что контакт CAN_LOW имеет МЕНЬШИЙ (LOW) номер, а CAN_HIGH – БОЛЬШИЙ (HIGH).

5-контактный Mini–C
Используется как DeviceNet , так и SDS , и является совместимым для этих двух протоколов.

| Контакт | Функция | Цвет DeviceNet |
| 1 | Экран | Неизолированный |
| 2 | V+ | Красный |
| 3 | V- | Черный |
| 4 | CAN_H | Белый |
| 5 | CAN_L | Синий |
Модули оснащены разъемами типа «папа». Подаваемое напряжение 24 В ±1%
6-контактный Deutsch DT04-6P
Рекомендован CANHUG для использования в транспортных гидравлических системах
Разъемы на модулях типа «папа», разъемы шины – «мама». На данный момент нет никаких рекомендаций по вопросу подачи питания.
| Контакт | Функция | Рекомендованный цвет кабеля |
| 1 | «Минус» питания |
Черный |
| 2 | CAN_H | Белый |
| 3 | Опционально: заземление сигнала | Желтый |
| 4 | Опционально: запуск | Серый |
| 5 | «Плюс» питания | Красный |
| 6 | CAN_L | Синий |
Тактовая синхронизация CAN
Схема бита
Каждый бит, передаваемый по шине CAN, разделяется, для нужд тактовой синхронизации, как минимум на 4 части (кванта). Часть логически делится на 4 группы или сегмента:
• сегмент синхронизации
• сегмент воспроизведения
• сегмент фазы 1
• сегмент фазы 2
Схема бита данных шины CAN:

Сегмент синхронизации, который всегда имеет длину в один квант, используется для синхронизации тактовых частот. Ожидается, что край бита появится здесь при смене данных на шине.
Сегмент воспроизведения нужен для компенсации задержки на линиях шины.
Сегменты фазы могут быть сокращены (сегмент фазы 1) или удлинены (сегмент фазы 2), если это потребуется для сохранения синхронизованности тактовых частот.
Уровни шины замеряются на границе между сегментом фазы 1 и сегментом фазы 2.
Большинство контроллеров CAN также обеспечивают возможность трехкратного замера на протяжении одного бита. В таком случае, замер происходит на границах двух квантов, предшествующих точке замера и результат зависит от мажоритарного декодирования (это верно как минимум в случае 82527).
Тактовая синхронизация
Для того, чтобы регулировать встроенный в чип генератор тактовых частот шины, контроллер CAN может сократить или удлинить бит на целое число квантов. Максимальное количество таких временных поправок бита определяется параметром «ширина скачка синхронизации» (Synchronization Jump Width, SJW).
Жесткая синхронизация происходит при переходе стартового бита от рецессивного к доминантному. Отсчет времени прохождения бита начинается заново с этой границы.
Повторная синхронизация происходит когда край бита не попадает в сегмент синхронизации сообщения. Один из сегментов фазы укорачивается или удлиняется на некоторое количество квантов, зависящее от ошибки фазы сигнала; максимальное количество используемых квантов определяется параметром «ширина скачка синхронизации» (Synchronization Jump Width, SJW).
Вычисление регистра тактовой синхронизации
Большинство контроллеров CAN позволяют программисту осуществлять настройку тактовой синхронизации используя следующие параметры:
• Значение предварительного делителя тактовой частоты
• Количество квантов перед точкой замера
• Количество квантов после точки замера
• Количество квантов в «ширина скачка синхронизации» (Synchronization Jump Width, SJW)
Обычно для этих целей выделяется два регистра: btr0 и btr1. Однако они могут слегка различаться у разных контроллеров, поэтому внимательно читайте инструкцию.
В контроллерах 82c200 и SJA1000, производства NXP (ранее Philips), раскладка регистра выглядит приблизительно так:
| 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 | |
| btr0 | SJW1 | SJW0 | BRP5 | BRP4 | BRP3 | BRP2 | BRP1 | BRP0 |
| btr1 | SAM | TSEG22 | TSEG21 | TSEG20 | TSEG13 | TSEG12 | TSEG11 | TSEG10 |
• BRP0..BRP5 устанавливают значение предварительного делителя тактовой частоты
• SJW0..SJW1 устанавливают длину SJW
• TSEG10..TSEG13 устанавливают количество квантов перед точкой замера (стартовый бит не включен)
• TSEG20..TSEG22 устанавливают количество квантов после точки замера
• SAM при установке значения 1 производится три замера, при установке значения 0 – один замер
Примечание: реальные значения этих параметров несколько отличаются от значений, вписанных в регистр.
Пример: если сигнал генератора, подаваемый на SJA1000, имеет частоту 16 МГц, и мы желаем получить скорость передачи 250 кбит/с, с точкой замера в районе 62% всего бита, и SJW равным 2 квантам, мы можем установить –
BRP = 4, что дает продолжительность кванта 2 × 4 / 16000000 с = 500 нс, и
TSEG1 = 5, что дает 5 квантов перед точкой замера, и
TSEG2 = 3, что дает 3 кванта после точки замера.
Каждый бит будет содержать 5 + 3 = 8 квантов, что даст нам желаемую скорость передачи 1 / (8 × 500 нс) = 250 кбит/с. Значения регистра должны быть следующими:
| btr0= |
(SJW – 1) * 64 + (BRP -1) = (2-1)*64 + (4-1) = 67 = 0×43 |
| btr1= |
SAM * 128 + (TSEG2 – 1)* 16 + (TSEG1 – 1) = 0×128 + (3-1)*16 + (4-1) = («4» потому, что стартовый бит не включен) 35 = 0×23 |
Точка замера в районе 5/8 = 62.5% бита.
Обработка ошибок CAN
Как CAN обрабатывает ошибки
Обработка ошибок встроена в протокол CAN и очень важна для производительности системы CAN. Обработка ошибок нацелена на обнаружение ошибок в сообщениях, передающихся по шине CAN, чтобы передатчик мог повторно выслать неверно принятое сообщение. Каждый CAN–контроллер на шине будет пытаться обнаружить ошибку в сообщении. Если ошибка найдётся, обнаруживший её узел будет передавать флаг ошибки, таким образом разрушая трафик шины. Другие узлы обнаружат ошибку, вызванную флагом ошибки (если еще не обнаружили оригинальную ошибку) и предпримут соответствующие действия, т.е. отбракуют текущее сообщение.
Каждый узел обслуживается двумя счетчиками ошибок: счетчиком ошибок передачи (Transmit Error Counter) и счетчиком ошибок приёма (Receive Error Counter). Существуют правила, регламентирующие повышение и/или понижение значения этих счетчиков. По существу, передатчик определяет повышение числа сбоев в счетчике ошибок передачи быстрее, нежели слушающие узлы увеличат значения своих счетчиков ошибок передачи. Это потому, что есть немалая вероятность, что сбой именно в передатчике! Когда значение любого счетчика ошибок превышает определенную величину, узел сначала становится Error Passive – это значит, что он не будет активно разрушать трафик шины при обнаружении ошибки; а затем Bus Off – это значит, что узел вообще не будет принимать участия в передаче данных по шине.
При помощи счетчиков ошибок узел CAN может не только обнаруживать сбои, но и ограничивать ошибки.
Механизмы обнаружения ошибок
Протокол CAN описывает не менее пяти различных способов обнаружения ошибок. Два из них работают на уровне бита, а остальные три – на уровне сообщения.
1.Мониторинг битов (Bit Monitoring).
2.Вставка битов (Bit Stuffing).
3.Проверка кадра (Frame Check).
4.Проверка распознавания (Acknowledgement Check).
5.Проверка циклической избыточности (Cyclic Redundancy Check).
Мониторинг бита
Каждый передатчик шины CAN осуществляет мониторинг (т.е. повторное прочтение) переданного уровня сигнала. Если уровень прочитанного бита отличается от уровня переданного, подается сигнал ошибки бита (Bit Error). (Роста бита ошибок в процессе разрешения конфликтов не происходит.) Вставка битов
После того как узел передаст пять непрерывно следующих друг за другом битов одного уровня, он добавит к исходящему потоку битов шестой бит, противоположного уровня. Получатели будут удалять этот дополнительный бит. Это делается для предупреждения появления излишнего количества компонентов DC на шине, но также дает получателям дополнительную возможность обнаружения ошибок: если по шине передается более пяти непрерывно следующих друг за другом битов одного уровня, подается сигнал ошибки вставки.
Проверка кадра
Некоторые части сообщения CAN имеют фиксированный формат, т.е. стандарт четко определяет, какие уровни должны произойти и когда. (Эти части – ограничитель CRC (CRC Delimiter), ограничитель ACK (ACK Delimiter), конец кадра (End of Frame), а также пауза (Intermission), однако для них существуют дополнительные специализированные правила проверки на ошибки.) Если контроллер CAN обнаружит неверное значение в одном из этих полей, он подаст сигнал ошибки формы (Form Error).
Проверка распознавания
Ожидается, что все узлы шины, которые получили сообщение корректно (независимо от того, было ему это сообщение «интересно» или нет), отправят доминантный уровень в так называемой области распознавания (Acknowledgement Slot) кадра. Передатчик будет передавать рецессивный уровень. Если передатчик не сможет обнаружить доминантный уровень в области распознавания, он подаст сигнал ошибки распознавания (Acknowledgement Error).
Проверка циклической избыточности
Каждое сообщение содержит 15–битную контрольную сумму циклической избыточности (Cyclic Redundancy Checksum, CRC), и любой узел, обнаруживший что CRC в сообщении отличается от посчитанного им, подаст сигнал ошибки CRC (CRC Error).
Механизмы ограничения ошибок
Каждый контроллер CAN шины будет пытаться обнаружить описанные выше ошибки в каждом сообщении. Если ошибка обнаружится, нашедший её узел передаст флаг ошибки, таким образом разрушая передачу данных по шине. Другие узлы обнаружат ошибку, вызванную флагом ошибки (если они ещё не обнаружили оригинальную ошибку) и предпримут соответствующее действие, т.е. сбросят текущее сообщение.
Каждый узел обслуживают два счетчика ошибок: счетчик ошибок передачи и счетчик ошибок приема. Существуют правила, описывающие условия повышения и/или понижения значений этих счетчиков. По существу, передатчик, обнаруживший сбой, повышает значение своего счетчика ошибок передачи быстрее, чем слушающие узлы повысят значения своих счетчиков ошибок приема. Это потому, что есть большая вероятность, что сбоит сам передатчик!
Узел начинает работу в режиме Error Active. Когда значение любого из двух счетчиков ошибок превысит 127, узел перейдет в состояние Error Passive, а когда значение счетчика ошибок передачи превысит 255, узел перейдёт в состояние Bus Off.
• Узел в режиме Error Active при обнаружении ошибки будет передавать флаги активной ошибки (Active Error Flags).
• Узел в режиме Error Passive при обнаружении ошибки будет передавать флаги пассивной ошибки (Passive Error Flags).
• Узел в режиме Bus Off не будет передавать ничего.
Правила повышения и понижения значений счетчиков ошибок довольно сложные, но принцип прост: ошибка передачи добавляет 8 пунктов, а ошибка прием – 1 пункт. Правильно переданные и/или принятые сообщения вызывают понижение значения счетчика(ов).
Пример (слегка упрощенный): Представим, что у узла A плохой день. Всякий раз, когда A пытается передать сообщение, происходит сбой (не важно, по какой причине). При каждом сбое значение счетчика ошибок передач увеличивается на 8 пунктов и передается флаг активной ошибки. Затем он пытается послать сообщение ещё раз.. и всё повторяется.
Когда значение счетчика ошибок передачи превысит 127 пунктов (т.е. после 16 попыток), узел A перейдёт в режим Error Passive. Разница в том, что теперь он будет передавать флаги пассивной ошибки. Флаг пассивной ошибки содержит 6 рецессивных битов и не будет нарушать передачу других данных по шине – поэтому другие узлы не услышат жалобы A на ошибки шины. Однако A продолжит повышать значение счетчика ошибок передачи. Когда он превысит 255 пунктов, узел A окончательно сдастся и перейдет в режим Bus Off.
Что другие узлы думают об узле A? – После каждого флага активной ошибки, переданного узлом A, остальные узлы повышают значения своих счетчиков пассивной ошибки на 1 пункт. За всё то время, что потребуется узлу A для перехода в режим Bus Off, значения счетчиков ошибок получения остальных узлов не превысят границы Error Passive, т.е. 127. Это значение будет уменьшаться на 1 пункт при каждом корректном получении сообщения. Однако узел А будет оставаться в режиме Bus Off.
Большинство контроллеров CAN будут предоставлять биты статуса (и соответствующие прерывания) для двух состояний:
• «Предупреждение об ошибке» (Error Warning) – значение одного или обеих счетчиков ошибок превысило 96 пунктов
• Bus Off, как описано выше.
Некотрые, но не все (!), контроллеры также предоставляют бит для состояния Error Passive. Немногие контроллеры также предоставляют прямой доступ к счетчикам ошибок.
Привычка контроллеров CAN автоматически переотправлять сообщения при возникновении ошибок иногда может раздражать. На рынке имеется как минимум один контроллер (SJA1000 от Philips), поддерживающий полное ручное управление обработкой ошибок.
Режимы сбоев шины
Стандарт ISO 11898 перечисляет несколько режимов сбоев кабеля шины CAN:
1.CAN_H прерван
2.CAN_L прерван
3.CAN_H короткозамкнутый на напряжение батаре
4.CAN_L короткозамкнутый на землю
5.CAN_H короткозамкнутый на землю
6.CAN_L короткозамкнутый на напряжение батареи
7.CAN_L короткозамкнутый на провод
8.CAN_H и CAN_L прерваны в одном и том же месте
9.Потеря соединения с оконечной нагрузкой сети
Для сбоев 1–6 и 9 «рекомендовано», чтобы шина сохраняла работоспособность путём снижения соотношения сигнал/шум (S/N), а в случае сбоя 8 – чтобы исходная подсистема сохранила работоспособность. Для сбоя 7 существует «опциональная» возможность сохранения работоспособности путём снижения соотношения сигнал/шум (S/N).
На практике система CAN, построенная на приемопередатчиках типа 82C250, не сохранит работоспособность при сбоях 1–7, а при сбоях 8–9 может как сохранить, так и не сохранить.
Существуют «устойчивые к сбоям» драйверы, такие как TJA1053, способные обрабатывать все сбои. Обычно за эту устойчивость приходится платить ограничением максимальной скорости; для TJA1053 она составляет 125 кбит/с.
По материалам компании Kvaser . С оригинальными текстами на английском языке можно ознакомиться на сайте компании Kvaser , перейдя по этой ссылке .