Этот способ, часто называемый реостатным,
является весьма простым по своей
реализации и поэтому широко используется
для регулирования скорости, тока и
момента ДПТ. Семейство искусственных
(регулировочных) характеристик ДПТ
можно получить, проанализировав,
например, как изменяется скорость
холостого ДПТ 0и наклон его характеристик при варьировании
сопротивления добавочного резистораRд,.Из (3.6а)
видно, что0не зависит отRд,поэтому все искусственные характеристики
пересекаются на оси скорости в точке с
координатой=0;I=0;М=0.
Кроме того, наклон характеристики,
определяемый перепадом скорости
![]() ,
,
пропорционален (при фиксированных
значениях токаIи
моментаМ) полному сопротивлению
якоря. Поэтому по мере увеличенияRд,наклон характеристик также увеличивается,
они становятся более мягкими.
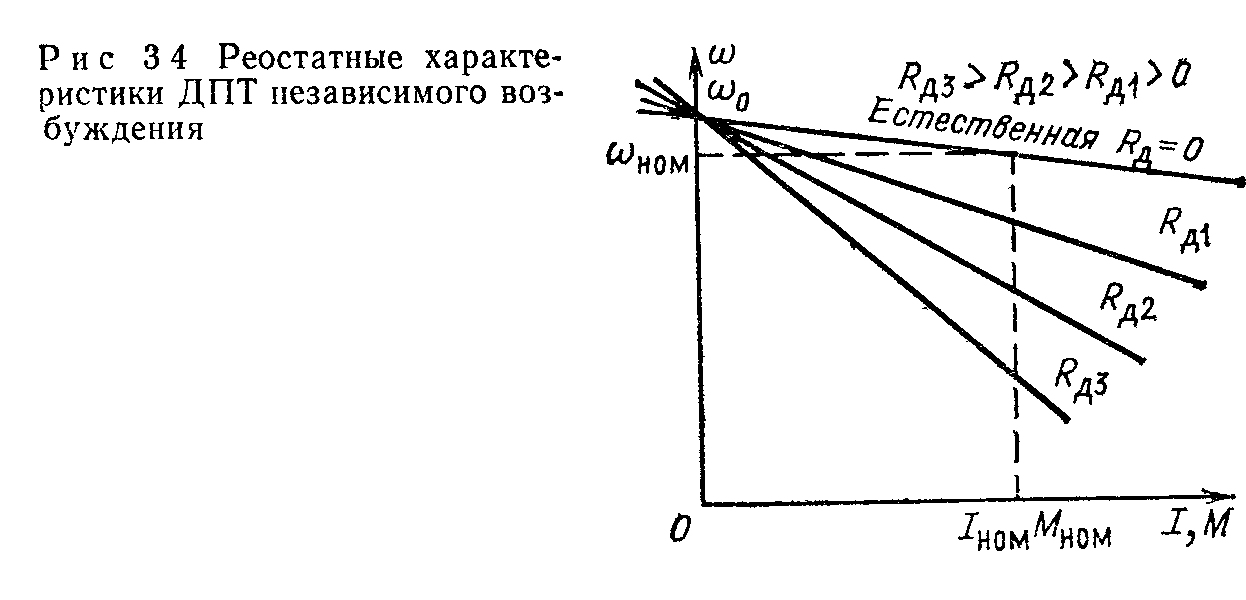
Проведенный
анализ позволяет изобразить искомое
семейство электромеханических и
механических характеристик в виде
совокупности линий, показанных на рис.
3.4. При Rд=0 ДПТ
имеет естественные механическую и
электромеханическую характеристики,
на которых находится точка номинального
режима с координатамином,Iномином,Мном.
а) Регулирование скорости.Оценим
данный способ регулирования скорости
по основным показателям, рассмотренным
в § 2.2.
1.Диапазон регулирования
скорости небольшой и обычно не превосходит
2–3. Причина этого заключается в снижении
жесткости характеристик по мере
увеличенияRди, как будет показано далее, в значительных
потерях мощности при больших диапазонах
регулирования скорости.
2.Направление регулирования
скорости–вниз от естественной
характеристики.
3.Плавность регулирования
скорости определяется плавностью
измененияRд.Если сопротивление этого резистора
изменяется плавно, то данный способ
обеспечивает плавное регулирование
скорости, если жеRдизменяется ступенчато, то и регулирование
скорости будет неплавным. Чаще всего
рассматриваемый способ обеспечивает
ступенчатое регулирование скорости.
4.Стабильность скорости
снижается по мере увеличения диапазона
регулирования и в общем случае является
невысокой.
5Экономичность регулирования
скорости оценим, сопоставив требуемые
капитальные затраты на реализацию
данного способа и стоимость потерь
мощности при регулировании. Капитальные
затраты на приобретение добавочных
резисторов невелики, так как стоимость
используемых резисторов обычно мала.
В то же время потери мощности и
соответственно расход электроприводом
электрической энергии и ее стоимость
оказываются значительными. Покажем это
Потери мощности в ДПТ Ропределяются разностью мощностей,
потребляемой из сети,P1=UIи полезной механическойP2=M,отданной с вала,
![]()
Выполнив
несложные преобразования, получим
![]() ,(3.9)
,(3.9)
где
![]() – относительный перепад скорости.
– относительный перепад скорости.
Из (3 9) видно, что уже при снижении скорости
в 2 раза по сравнению со скоростью
идеального холостого хода 0,
т. е. при![]() и
и![]() ,половина всей потребляемой из сети
,половина всей потребляемой из сети
мощностиP1идет
на потери мощности в самом ДПТ. Таким
образом, КПД привода уже приD=2
не превышает 50 %, а при больших диапазонах
снижается в еще большей степени
6.Допустимую нагрузку
ДПТ на искусственных характеристиках
найдем, если в (3.3) положим Ф=ФномиI=Iном.
Тогда получаемое выражение определит
допустимый по условиям нормального
нагрева момент ДПТ
![]() , (3.10)
, (3.10)
который оказывается равным номинальному
моменту двигателя Мном. Таким
образом, при работе ДПТ на искусственных
характеристиках он может быть нагружен
моментом нагрузки, равным номинальному
моменту ДПТ, находясь при этом в нормальном
тепловом режиме. Это заключение полностью
справедливо для тех ДПТ независимого
возбуждения, у которых условия охлаждения
не изменяются по мере снижения их
скорости. К таким ДПТ относятся, например
ДПТ с независимой внешней вентиляцией
и закрытые ДПТ без вентилятора. В тех
же случаях, когда ДПТ охлаждается за
счет собственного вентилятора на валу,
при снижении скорости его охлаждение
ухудшается, что требует соответствующего
снижения момента нагрузки.
Несмотря на не очень высокие
технико-экономические показатели,
реостатное регулирование скорости
из-за простоты своей реализации
используется достаточно широко тогда,
когда требуется небольшой диапазон
регулирования скорости движения
исполнительного органа или когда работа
на пониженных скоростях имеет
кратковременный характер. В частности,
такое регулирование применяется в
электроприводах подъемных кранов,
некоторых металлорежущих станков,
лифтов.
б) Регулирование (ограничение) тока и
момента.Получаемые искусственно
характеристики широко используются
для регулирования (ограничения) тока и
момента ДПТ независимого возбуждения
в переходных процессах, в которых ток
и момент могут принять недопустимо
большие значения для ДПТ. Так, в первый
момент пуска ДПТ находится в режиме
короткого замыкания (=0;E=0) и ток короткого
замыкания при его пуске по естественной
характеристике определяется соотношением![]() .
.
Из-за малостиRя(доли ома или единицы ом)![]() ,
,
в то время как допустимый для ДПТ
общепромышленного назначения ток![]() .
.
Таким образом, возникает необходимость
ограничения тока (и тем самым момента)
при пуске ДПТ, что может быть достигнуто
введением в цепь якоря добавочных
пусковых резисторов. Такая же необходимость
возникает при реверсе и торможении ДПТ
независимого возбуждения.
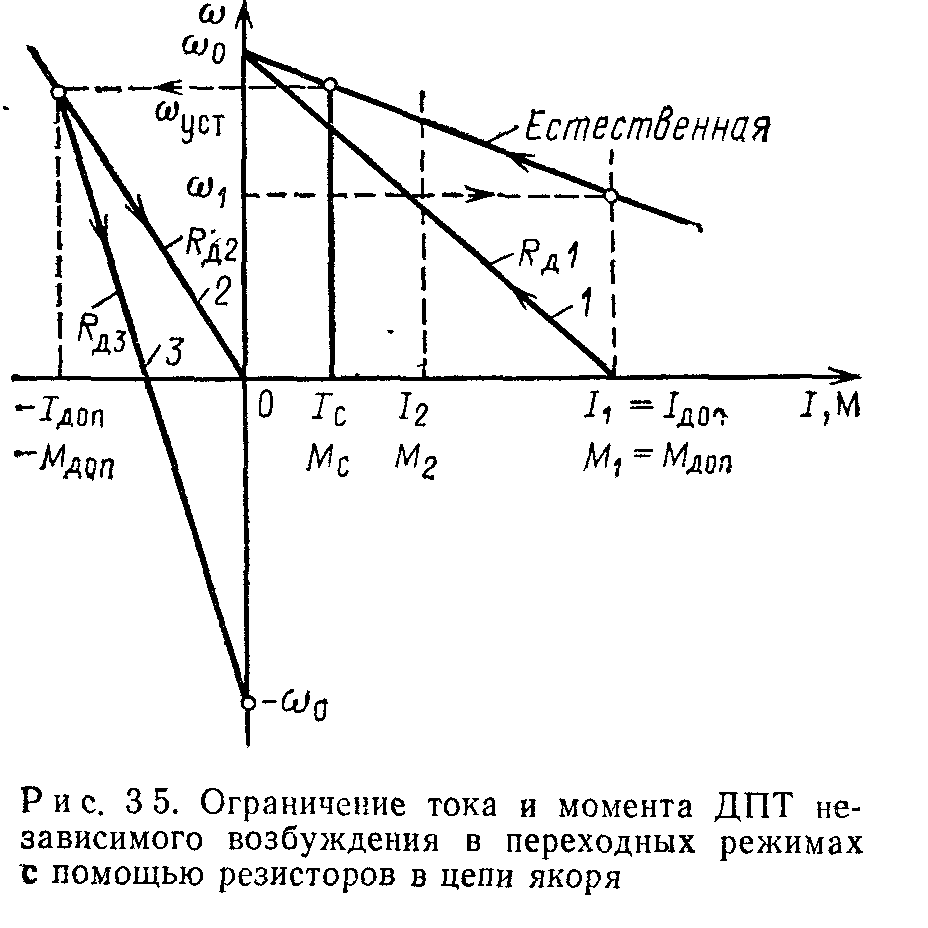
Для ограничения тока и момента при пуске
в простейшем случае используется одна
искусственная характеристика 1(рис. 3.5). Порядок пуска ДПТ следующий:
вначале он начинает работать по
характеристике1при наличии в цепи
якоря добавочного резистораRд1.
Далее при скорости1резисторRд1закорачивается и ДПТ переходит на
естественную характеристику. Сопротивление
резистораRд1выбирается из условия обеспечения
допустимого тока в начальный момент
пуска
![]() , (3.11)
, (3.11)
где Iдоп
– допустимый ток.
Во многих случаях при пуске ДПТ
используется не одна, а несколько
искусственных характеристик. Их
количество зависит от момента нагрузки
электропривода и требований плавности
переходных процессов.
Динамическое торможение ДПТ осуществляется
отключением якоря от сети и замыканием
его по схеме рис. 3.2 на резистор Rд2.
Двигатель переходит на характеристику
динамического торможения2(рис.
3.5), по которой и происходит торможение.
Сопротивление резистора Rд2определяется по допустимому броску
тока в первый момент перехода в режим
динамического торможения. Так как в
этот момент![]() ,
,
тоEU,и сопротивлениеRд2определится как
![]() (3.12)
(3.12)
Реверс или торможение противовключением
осуществляется изменением полярности
напряжения на якоре ДПТ с одновременным
вводом в якорь резистора Rд3.
Двигатель переходит на характеристику3(рис. 3.5), попадая в режим торможения
противовключением. В этом режиме ЭДС и
напряжение сети совпадают по направлению,
поэтому резисторRд3определяется по выражению
![]() .(3.13)
.(3.13)
В некоторых случаях для достижения
более точного регулирования тока и
момента в переходных режимах используется
не одна искусственная характеристика,
а несколько, как, например, при реализации
пусковой диаграммы ДПТ (см. рис. 3.8).
Отметим, что в рассматриваемом случае
резисторы вводятся в цепь якоря только
в переходных режимах работы ДПТ.
в) Расчет регулировочных резисторов.Выражения (3.11)–(3.13) позволяют рассчитать
сопротивления добавочных резисторов
в цепи якоря ДПТ по критерию допустимого
тока. Рассмотрим теперь общие методы
расчета сопротивлений регулировочных
резисторов.
Задача формируется следующим образом:
известны технические данные ДПТ и его
естественная электромеханическая
характеристика.
По условиям регулирования скорости,
тока или момента задана искусственная
характеристика (прямые 1–3на
рис. 3.6). Требуется определить сопротивление
добавочного резистора, при включении
которого в цепь якоря будет обеспечена
заданная характеристика.
Метод отрезков. Для получения расчетной
формулы этого метода запишем согласно
(3.4) выражение для скорости ДПТ на заданной
искусственной характеристике при
номинальных токе, моменте, магнитном
потоке и напряжении
![]() . (3.14)
. (3.14)
Так как
![]() ,
,
то (3.14) можно записать так:
![]() (3.15)
(3.15)
где
![]() – так называемое номинальное сопротивление
– так называемое номинальное сопротивление
ДПТ, Ом.
Из (3.15) получаем следующее соотношение:
![]() , (3.16)
, (3.16)
которое
отражает очень важное свойство ДПТ:
относительный перепад скорости ДПТ
![]() равен относительному активному
равен относительному активному
сопротивлению цепи якоряR/Rном.
Отметим, забегая вперед, что это свойство
характерно и для других типов двигателей,
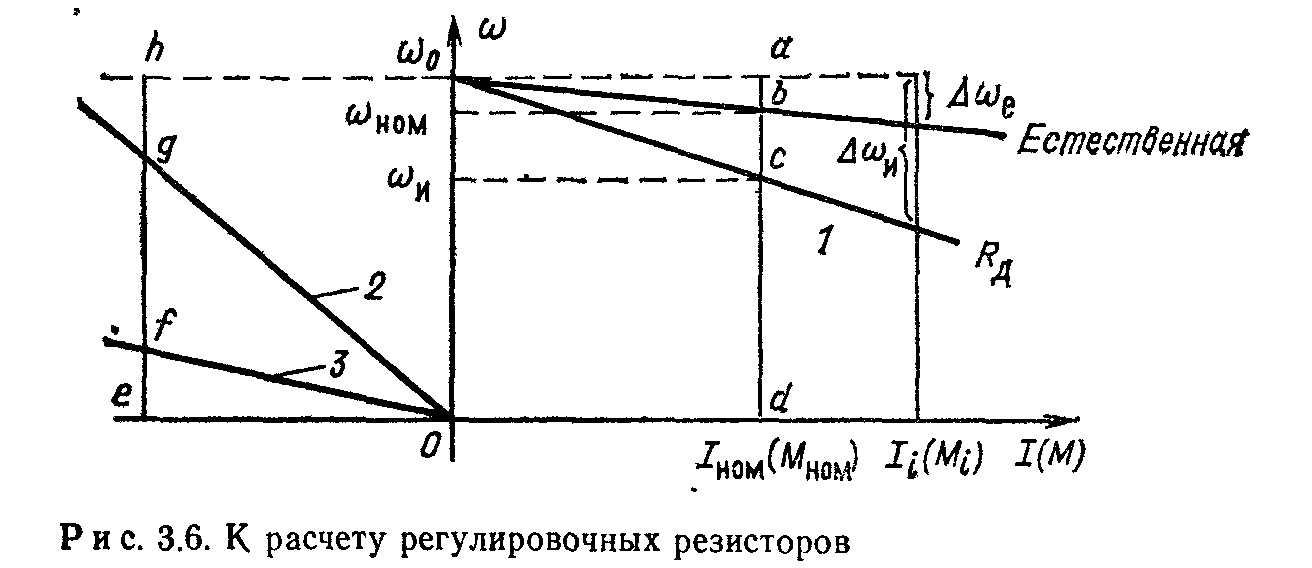
в частности асинхронных. Пропорцию
(3.16) удобно решать графически, для чего
обратимся к рис. 3.6. Обозначим на нем
характерные точкиа,b,
с, dи отметим, что
![]() ;
;![]() .
.
Тогда
![]() ; (3.17)
; (3.17)
![]() ; (3.18)
; (3.18)
![]() . (3.19)
. (3.19)
Таким образом, для нахождения Rд
следует по характеристикам определить
длины отрезковbcиadпри номинальном токе, рассчитать
номинальное сопротивление![]() и затем воспользоваться формулой (3.18).
и затем воспользоваться формулой (3.18).
Этот же порядок расчета сохраняется
тогда, когда исходными являются
механические характеристики ДПТ. В этом
случае длины отрезков определяются при
номинальном моменте.
Данный метод справедлив также и при
расчете резисторов в схеме динамического
торможения. Опуская вывод, который может
быть сделан аналогичным образом, приведем
окончательную формулу для расчета Rд,т,обеспечивающего характеристику
динамического торможения вида2 на
рис. 3.6,
![]() . (3.20)
. (3.20)
Отметим, что характеристика 3 на этом
рисунке соответствует Rд,т=0
и располагается параллельно естественной
характеристике.
Метод пропорций. При применении этого
метода используется выражение для
перепада скорости
на характеристиках ДПТ. Если согласно
(3.6) записать выражения дляна естественной и искусственной
электромеханической или механической
характеристике при одном и том же токеIiили моментеМi(рис. 3.6), а затем найти их отношение, то
получится следующая пропорция:
![]() . (3.21)
. (3.21)
Определяя из (3.21) Rд,получаем формулу для расчетаRдметодом пропорций
![]() (3.22)
(3.22)
Значения eиинаходятся, как и ранее, по характеристикам
рис. 3.6.
При расчетах
регулировочных резисторов в цепях якоря
ДПТ независимого возбуждения необходимо
знать собственное сопротивление якоря
ДПТ Rя. Назовем
возможные способы его нахождения.
1.Некоторые заводы-изготовители
приводят в каталогах значениеRя.
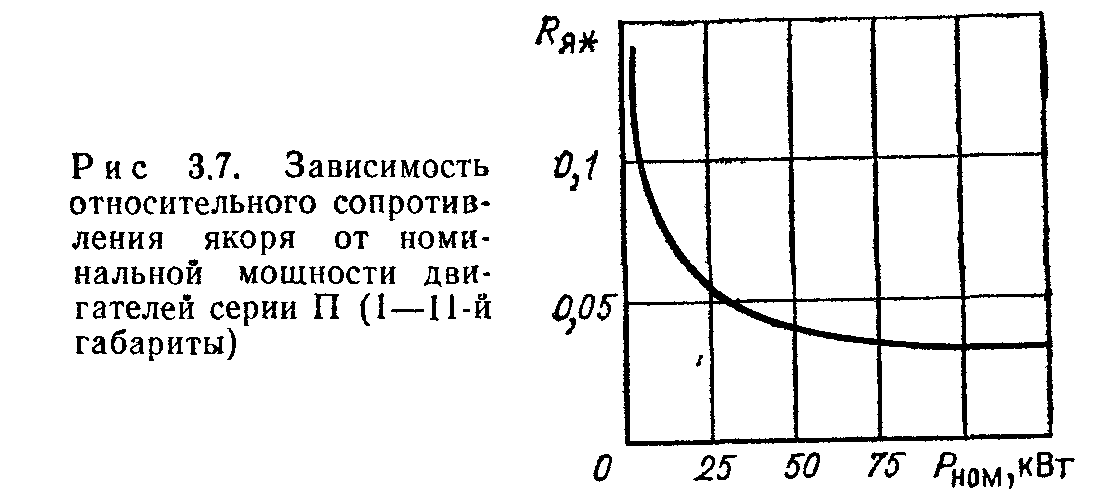
2.В справочной литературе
по электрическим машинам, например
[41], даются обобщенные зависимости
относительного сопротивления якоря![]() от мощностиРномдля ДПТ
от мощностиРномдля ДПТ
некоторых серий. Для примера на рис. 3.7
приведена эта зависимость для ДПТ серии
Л (1–11-й габариты).
3.При наличии ДПТ
сопротивлениеRяможет быть определено экспериментально,
путем непосредственного измерения его
между щетками ДПТ
4.При невозможности
воспользоваться указанными выше
способами может быть применена следующая
приближенная формула для определенияRяпо номинальным
паспортным данным ДПТ:
![]() (3.23)
(3.23)
где ном– номинальный КПД двигателя.
5.При наличии экспериментально
снятой электромеханической или
механической характеристики ДПТ значениеRяможет быть
определено по методу отрезков с помощью
формулы (3.19).
Пример 3.1.Рассчитать и построить
естественные электромеханическую и
механическую характеристики ДПТ,
имеющего следующие паспортные данные:Рном=2,2 кВт;Uном=220
В;Iном=13 А;nном=1000 об/мин;ном=77 %;Iв,ном=0,73 А;Rо,в=300 Ом.
Для построения искомых характеристик,
которые представляют собой прямые
линии, достаточно определить координаты
двух точек: номинального режима и
холостого хода
1.Для точки номинального
режима определяем номинальную угловую
скорость
![]()
номинальный
момент
![]()
номинальное
сопротивление ДПТ
![]()
2.Далее по приближенной
формуле (3.23) находим сопротивление
якорной цепи
![]()
3.Используя (34), определяем
значение![]()
![]()
4.Скорость идеального
холостого хода согласно (3.6а) равна
![]()
5.По координатам точек
холостого хода (0,
0) и номинального режима (ном,Iном) на рис 38
построена естественная электромеханическая
характеристика ДПТ независимого
возбуждения Естественная механическая
характеристика также может быть построена
по этим же двум точкам
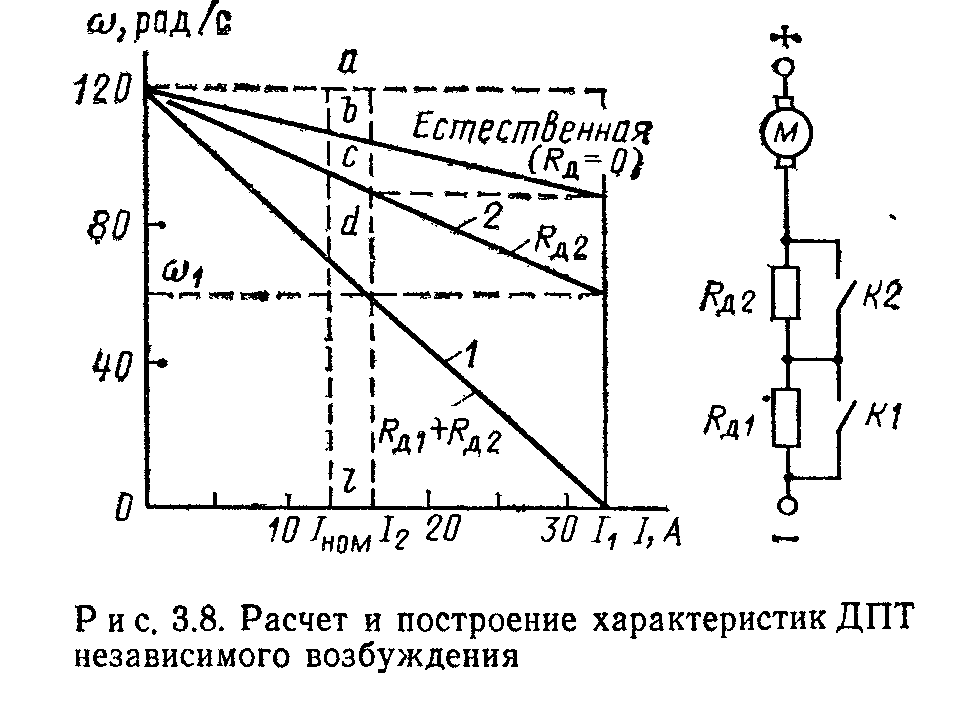
Пример 3.2.Расчитать и построить для
ДПТ (см. пример 3 1) пусковую диаграмму
при использовании двух ступеней пускового
резистора.
Построение пусковой диаграммы ДПТ
осуществляется в следующем порядке.
1.Рассчитывается максимально
допустимый при пуске токI1=Iдоп.
Для рассматриваемого примера примем
![]()
2.Определяется ток
переключения I2,значение которого можно получить двумя
путями;
а) подбором с таким расчетом, чтобы число
искусственных характеристик равнялось
двум, а ток в переходном процессе не
превосходил Iдоп;
б) расчетом с помощью следующей формулы,
которая приводится без вывода:
![]() (3.24)
(3.24)
где т –число заданных ступеней
пускового резистора.
Методом подбора из рис. 3.8 находим I2=16
А. Отметим, что если пуск ДПТ осуществляется
под нагрузкой, то токI2должен на 10–20 % превосходить ток нагрузкиIс, т. е. должно
соблюдаться равенство:
![]()
3.С помощью метода отрезков
определяем сопротивление ступеней
пускового резистора

Искусственная характеристика Iна рис. 3.8 соответствует наличию в цепи
якоря обеих ступеней пускового резистораRд1+Rд2,
а характеристика2–второй ступениRд2. На рис. 3.8
изображена также схема якорной цепи
двигателя при реализации этой пусковой
диаграммы.
Форум РадиоКот • Просмотр темы — Ток якоря ДПТ.
Сообщения без ответов | Активные темы
| ПРЯМО СЕЙЧАС: |
| Автор | Сообщение | ||
|---|---|---|---|
|
|
Заголовок сообщения: Ток якоря ДПТ.
|
||
Зарегистрирован: Ср сен 24, 2014 20:43:50 Рейтинг сообщения: 0
|
Здравствуйте ! Вот есть двигатель постоянного тока , возбуждение независимое. Вот я подаю на обмотку якоря его номинальное напряжение. На обмотку возбуждения подаю так же номинальное напряжение. Двигатель должен выйти на номинальные обороты. Ток якоря должен быть меньше номинального, так как отсутствует нагрузка на валу. Я прав? Второй вопрос. Меняем условия. Уменьшаем напряжение на обмотке возбуждения. Напряжение на якоре остается номинальным. Обороты должны возрасти?, а ток якоря снизится или возрастет? |
||
| Вернуться наверх |
Профиль
|
||


| Реклама | |
|
|
|
|
kaetzchen |
Заголовок сообщения: Re: Ток якоря ДПТ.
|
|
Карма: 43 Рейтинг сообщения: 0
|
Отбрасывая возможные индукционные токи и эффекты, если питание от переменки, считаем, что запитываем постоянкой ,то |
| Вернуться наверх | |
| Реклама | |
|
|
|

|
Глеб 987 |
Заголовок сообщения: Re: Ток якоря ДПТ.
|
||
Зарегистрирован: Ср сен 24, 2014 20:43:50 Рейтинг сообщения: 0
|
Благодарю |
||
| Вернуться наверх | |||
|
Глеб 987 |
Заголовок сообщения: Re: Ток якоря ДПТ.
|
||
Зарегистрирован: Ср сен 24, 2014 20:43:50 Рейтинг сообщения: 0
|
Насколько можно снизить ток возбуждения? |
||
| Вернуться наверх | |||
| Реклама | |
|
|
Выгодные LED-драйверы для решения любых задач КОМПЭЛ представляет со склада и под заказ широкий выбор LED-драйверов производства MEAN WELL, MOSO, Snappy, Inventronics, EagleRise. Линейки LED-драйверов этих компаний, выполненные по технологии Tunable White и имеющие возможность непосредственного встраивания в систему умного дома (димминг по шине KNX), перекрывают практически полный спектр применений: от простых световых указателей и декоративной подсветки до диммируемых по различным протоколам светильников внутреннего и наружного освещения. Подобрать LED-драйвер>> |
|
musor |
Заголовок сообщения: Re: Ток якоря ДПТ.
|
||
Карма: 112 Рейтинг сообщения: 0
|
регулировку оборотов ослаблением поля делают не боле чем 3кратной…. |
||
| Вернуться наверх | |||
| Реклама | |
|
|
|
| Реклама | |
|
|
LIMF – источники питания High-End от MORNSUN со стандартным функционалом на DIN-рейку На склад Компэл поступили ИП MORNSUN (крепление на DIN-рейку) с выходной мощностью 240 и 480 Вт. Данные источники питания обладают 150% перегрузочной способностью, активной схемой коррекции коэффициента мощности (ККМ; PFC), наличием сухого контакта реле для контроля работоспособности (DC OK) и возможностью подстройки выходного напряжения. Источники питания выполнены в металлическом корпусе, ПП с компонентами покрыта лаком с двух сторон, что делает ее устойчивой к соляному туману и пыли. Изделия соответствуют требованиям ANSI/ISA 71.04-2013 G3 на устойчивость к коррозии, а также нормам ATEX для взрывоопасных зон. Подробнее>> |
|
Глеб 987 |
Заголовок сообщения: Re: Ток якоря ДПТ.
|
||
Зарегистрирован: Ср сен 24, 2014 20:43:50 Рейтинг сообщения: 0
|
Т.е. если максимальный ток возбуждения 15А, то снизить его можно до 5А, правильно? |
||
| Вернуться наверх | |||
|
Vovan555 |
Заголовок сообщения: Re: Ток якоря ДПТ.
|
||
Карма: 45 Рейтинг сообщения: 0
|
В, принципе, правильно, но есть одно но.. Снижать возбуждение, и не сразу, а постепенно, можно при работающем и набравшем определённые обороты двигателе. |
||
| Вернуться наверх | |||

|
Глеб 987 |
Заголовок сообщения: Re: Ток якоря ДПТ.
|
||
Зарегистрирован: Ср сен 24, 2014 20:43:50 Рейтинг сообщения: 0
|
Вот табличка на дпт https://yadi.sk/i/VCxVvY953PxiNX. Там написано что возбуждение 220/110 и обороты 500/1000. Это значит ,что если подать на возбуждение 220, то обороты будут 500, а если 110, то 1000? |
||
| Вернуться наверх | |||
|
Vovan555 |
Заголовок сообщения: Re: Ток якоря ДПТ.
|
||
Карма: 45 Рейтинг сообщения: 0
|
Согласно табличке, да.. Но желательно разводку проверить. Возбуждение может иметь несколько выводов под разные напряжения.. |
||
| Вернуться наверх | |||
|
Глеб 987 |
Заголовок сообщения: Re: Ток якоря ДПТ.
|
||
Зарегистрирован: Ср сен 24, 2014 20:43:50 Рейтинг сообщения: 0
|
Спасибо |
||
| Вернуться наверх | |||
|
musor |
Заголовок сообщения: Re: Ток якоря ДПТ.
|
||
Карма: 112 Рейтинг сообщения: 0
|
ДЛЯ ЗАПУСКА ДПТ без применения тиристорных систем и DCDC на базе шим |
||
| Вернуться наверх | |||
|
Rokl |
Заголовок сообщения: Re: Ток якоря ДПТ.
|
|
Карма: 17 Рейтинг сообщения: 0
|
Насколько можно снизить ток возбуждения? У разных по конструктиву движков ток возбуждения можно снижать в три — четыре раза (дальше снижать ток возбуждения бессмыслено из-за уменьшения крутящего момента на валу двигателя), но это приводит к потере крутящего момента на валу двигателя примерно во столько же раз во сколько уменьшили ток возбуждения. Потому второй контур управления скоростью движка (по ослаблению магнитного поля возбуждения уменьшением тока в катушке возбуждения) используют только при значительном (в разы) запасе крутящего момента на валу двигателя П.Т. При уменьшении поля катушки возбуждения ток двигателя уменьшается (т.к. уменьшается ток в обмотке возбуждения). Теоретически при минимальном возбуждении обороты двигателя должны уйти в бесконечность, движок разрушиться(пойти в разнос). На мощных движках ПТ (десятки киловатт) ставится защита от отсутствия тока в катушке возбуждения двигателя. |
| Вернуться наверх | |
|
Глеб 987 |
Заголовок сообщения: Re: Ток якоря ДПТ.
|
||
Зарегистрирован: Ср сен 24, 2014 20:43:50 Рейтинг сообщения: 0
|
А вот такая ситуация. На якорь подали половину номинального напряжения(условно 100 от 200В) , на возбуждение подано номинальное напряжение. Вал дпт не нагружен. Следовательно обороты будут равны половине +- от номинальных. Теперь нагружаем вал дпт. Ток в якоре начинает расти, а что будет с напряжением на якоре? Теоретически оно должно остаться неизменным( если позволяют параметры источника питания) ? И обороты не должны падать? |
||
| Вернуться наверх | |||
|
Vovan555 |
Заголовок сообщения: Re: Ток якоря ДПТ.
|
||
Карма: 45 Рейтинг сообщения: 0
|
Цитата: подали половину номинального напряжения. …обороты будут равны половине +- от номинальных. Примерно так.. Цитата: Теперь нагружаем вал дпт. ….что будет с напряжением на якоре? Должно остаться неизменныи, если ИП позволит.. Цитата: И обороты не должны падать? В электродвигателях независимого возбуждения разность, между частотой вращения якоря на хх и под номинальной нагрузкой, составляет, примерно, 5-10%, зависит от конструкции двигателя. |
||
| Вернуться наверх | |||
|
mickbell |
Заголовок сообщения: Re: Ток якоря ДПТ.
|
||
Карма: 110 Рейтинг сообщения: 0
|
У мощных машин постоянного тока бывают дополнительные полюса, нейтрализующие реакцию якоря (влияние поля якоря от его тока на поле возбуждения), а также дополнительная компенсационная обмотка на полюсах обмотки возбуждения, поток которой направлен встречно потоку возбуждения. Обе эти обмотки включаются в якорную цепь последовательно с якорем. Рассказывали, что иногда попадаются перекомпенсированные машины, у которых обороты под нагрузкой не только не падают, а даже немного растут. |
||
| Вернуться наверх | |||

|
musor |
Заголовок сообщения: Re: Ток якоря ДПТ.
|
||
Карма: 112 Рейтинг сообщения: 0
|
эт да сменников такое сплош и рядом |
||
| Вернуться наверх | |||
|
Дмитрий М |
Заголовок сообщения: Re: Ток якоря ДПТ.
|
||
Карма: 49 Рейтинг сообщения: 0
|
И такие машины называют смешанного питания. Обычно это от нескольких киловатт и выше. У них кроме шунтовой (параллельного возбуждения) Ш и якорной Я появляется последовательная С и дополнительная Д . Обычно они внутри двигателя частично неразъемно соединены. И в таких двигателях сложно организовывать реверс. |
||
| Вернуться наверх | |||

|
musor |
Заголовок сообщения: Re: Ток якоря ДПТ.
|
||
Карма: 112 Рейтинг сообщения: 0
|
реверс таи делаеься просто реверсом спарки якор+д относитьено с и ш Последний раз редактировалось musor Пн ноя 27, 2017 19:38:50, всего редактировалось 1 раз. |
||
| Вернуться наверх | |||
|
Глеб 987 |
Заголовок сообщения: Re: Ток якоря ДПТ.
|
||
Зарегистрирован: Ср сен 24, 2014 20:43:50 Рейтинг сообщения: 0
|
Благодарю |
||
| Вернуться наверх | |||
|
Глеб 987 |
Заголовок сообщения: Re: Ток якоря ДПТ.
|
||
Зарегистрирован: Ср сен 24, 2014 20:43:50 Рейтинг сообщения: 0
|
Новая ситуация. Берем дпт с независимым возбуждением к валу которого подсоединен другой двигатель с большим количеством оборотов . На якорь подаем номинальное напряжение , на возбуждение подаем номинальное напряжение. Двигатель крутится с определенными оборотами. Теперь включаем второй двигатель и он начинает крутить вал со своей скоростью, которая больше. Что будет происходить с током якоря и с напряжением на нем ? |
||
| Вернуться наверх | |||
Кто сейчас на форуме |
|
Сейчас этот форум просматривают: нет зарегистрированных пользователей и гости: 27 |
| Вы не можете начинать темы Вы не можете отвечать на сообщения Вы не можете редактировать свои сообщения Вы не можете удалять свои сообщения Вы не можете добавлять вложения |


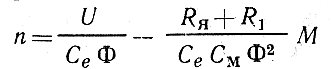
Способы регулирования частоты вращения двигателей оцениваются следующими показателями: плавностью регулирования; диапазоном регулирования, определяемым отношением наибольшей частоты вращения к наименьшей; экономичностью регулирования, определяемой стоимостью регулирующей аппаратуры и потерями электроэнергии в ней.
Из (29.5) следует, что регулировать частоту вращения двигателя независимого возбуждения можно изменением сопротивления в цепи якоря, изменением основного магнитного потока Ф, изменением напряжения в цепи якоря.
![clip_image002[5]](https://electrikam.com/wp-content/uploads/2014/10/clip_image0025_thumb1.gif "clip_image002[5]") (29.5)
(29.5)
Регулирование частоты вращения ДПТ НВ введение дополнительного сопротивления в цепь якоря
Дополнительное сопротивление (реостат rд) включают в цепь якоря аналогично пусковому реостату (ПР). Однако в отличие от последнего оно должно быть рассчитано на продолжительное протекание тока.
При включении сопротивления rд в цепь якоря выражение частоты (29.5) принимает вид
 , (29.12)
, (29.12)
где ![]() — частота вращения в режиме х.х.;
— частота вращения в режиме х.х.;
![]() — изменение частоты вращения, вызванное падением напряжения в цепи якоря.
— изменение частоты вращения, вызванное падением напряжения в цепи якоря.
С увеличением rд возрастает ![]() , что ведет к уменьшению частоты вращения. Зависимость n = f(rд) иллюстрируется также и механическими характеристиками двигателя независимого возбуждения (рис. 29.4, а): с повышением rд увеличивается наклон механических характеристик, а частота вращения при заданной нагрузке на валу (M = Mном ) уменьшается. Этот способ обеспечивает плавное регулирование частоты вращения в широком диапазоне (только в сторону уменьшения частоты от номинальной), однако он неэкономичен из-за значительных потерь электроэнергии в регулировочном реостате (I2a *rД), которые интенсивно растут с увеличением мощности двигателя.
, что ведет к уменьшению частоты вращения. Зависимость n = f(rд) иллюстрируется также и механическими характеристиками двигателя независимого возбуждения (рис. 29.4, а): с повышением rд увеличивается наклон механических характеристик, а частота вращения при заданной нагрузке на валу (M = Mном ) уменьшается. Этот способ обеспечивает плавное регулирование частоты вращения в широком диапазоне (только в сторону уменьшения частоты от номинальной), однако он неэкономичен из-за значительных потерь электроэнергии в регулировочном реостате (I2a *rД), которые интенсивно растут с увеличением мощности двигателя.

Рис. 29.4. Механические характеристики двигателя параллельного возбуждения:
а — при введении в цепь якоря добавочного сопротивления;
б — при изменении основного магнитного потока;
в — при изменении напряжения в цепи якоря
Регулирование частоты вращения ДПТ НВ изменением основного магнитного потока
Этот способ регулирования в двигателе независимого возбуждения реализуется посредством реостата rрег в цепи обмотки возбуждения. Так, при уменьшении сопротивления реостата возрастает магнитный поток обмотки возбуждения, что сопровождается понижением частоты вращения [см. (29.5)]. При увеличении rрег частота вращения растет. Зависимость частоты вращения от тока возбуждения выражается регулировочной характеристикой двигателя n=f(IВ) при ![]() и
и ![]() .
.
Из выражения (29.5) следует, что с уменьшением магнитного потока Ф частота вращения n увеличивается по гиперболическому закону (рис. 29.5,а). Но одновременно уменьшение Ф ведет к росту тока якоря Ia = M/(Cм*Ф). При потоке ![]() ток якоря достигает значения
ток якоря достигает значения ![]() , т. е. падение напряжения в цепи якоря достигает значения, равного половине напряжения, подведенного к якорю
, т. е. падение напряжения в цепи якоря достигает значения, равного половине напряжения, подведенного к якорю ![]() . В этих условиях частота вращения двигателя достигает максимума nmax. При дальнейшем уменьшении потока
. В этих условиях частота вращения двигателя достигает максимума nmax. При дальнейшем уменьшении потока ![]() частота вращения двигателя начинает убывать, так как из-за интенсивного роста тока Ia второе слагаемое выражения (29.9) нарастает быстрее первого.
частота вращения двигателя начинает убывать, так как из-за интенсивного роста тока Ia второе слагаемое выражения (29.9) нарастает быстрее первого.
При небольшом нагрузочном моменте на валу двигателя максимальная частота вращения nmax во много раз превосходит номинальную частоту вращения двигателя nном и является недопустимой по условиям механической прочности двигателя, т. е. может привести к его «разносу». Учитывая это, при выборе реостата rрег необходимо следить за тем, чтобы при полностью введенном его сопротивлении частота вращения двигателя не превысила допустимого значения.
Например, для двигателей серии 2П допускается превышение частоты вращения над номинальной не более чем в 2—3 раза. Необходимо также следить за надежностью электрических соединений в цепи обмотки возбуждения двигателя, так как при разрыве этой цепи магнитный поток уменьшается до значения потока остаточного магнетизма Фост, при котором частота вращения может достигнуть опасного значения.
Вид регулировочных характеристик n = f(Ф) зависит от значения нагрузочного момента M2 на валу двигателя: с ростом M2 максимальная частота вращения nmax уменьшается (рис. 29.5, б).
Рис. 29.5. Регулировочные характеристики двигателя независимого возбуждения
Недостаток рассмотренного способа регулирования частоты вращения состоит в том, что при изменении магнитного потока Ф меняется угол наклона механической характеристики двигателя.
Рассмотренный способ регулирования частоты вращения прост и экономичен, так как в двигателях независимого возбуждения ток IВ = (0,01 — 0,07)Iа, а поэтому потери в регулировочном реостате ![]() невелики.
невелики.
Однако диапазон регулирования обычно составляет nMAX/nMIN = 2 — 5. Объясняется это тем, что нижний предел частоты вращения обусловлен насыщением машины, ограничивающим значение магнитного потока Ф, а верхний предел частоты опасностью «разноса» двигателя и усилением влияния реакции якоря, искажающее действие которого при ослаблении основною магнитного потока Ф усиливается и ведет к искрению на коллекторе или же к появлению кругового огня.
Регулирование частоты вращения ДПТ НВ изменение напряжения в цепи якоря
Регулирование частоты вращения двигателя изменением питающего напряжения применяется лишь при IB = const, т. е. при раздельном питании цепей обмотки якоря и обмотки возбуждения при независимом возбуждении.
Частота вращения в режиме х.х. n0 пропорциональна напряжению, а ![]() от напряжения не зависит, поэтому механические характеристики двигателя при изменении напряжения не меняют угла наклона к оси абсцисс, а смещаются по высоте, оставаясь параллельными друг другу (см. рис. 29.4, в). Для осуществления этого способа регулирования необходимо цепь якоря двигателя подключить к источнику питания с регулируемым напряжением. Для управления двигателями малой и средней мощности в качестве такого источника можно применить регулируемый выпрямитель, в котором напряжение постоянного тока меняется регулировочным автотрансформатором (АТ), включенным на входе выпрямителя (рис. 29.6,а).
от напряжения не зависит, поэтому механические характеристики двигателя при изменении напряжения не меняют угла наклона к оси абсцисс, а смещаются по высоте, оставаясь параллельными друг другу (см. рис. 29.4, в). Для осуществления этого способа регулирования необходимо цепь якоря двигателя подключить к источнику питания с регулируемым напряжением. Для управления двигателями малой и средней мощности в качестве такого источника можно применить регулируемый выпрямитель, в котором напряжение постоянного тока меняется регулировочным автотрансформатором (АТ), включенным на входе выпрямителя (рис. 29.6,а).
Для управления двигателями большой мощности целесообразно применять генератор постоянного тока независимого возбуждения; привод осуществляется посредством приводного двигателя (ПД), в качестве которого обычно используют трехфазный двигатель переменного тока. Для питания постоянным током цепей возбуждения генератора Г и двигателя Д используется возбудитель В — генератор постоянного тока, напряжение на выходе которого поддерживается неизменным. Описанная схема управления двигателем постоянного тока (рис. 29.6, б) известна под названием системы «генератор — двигатель» (Г—Д).

Рис. 29.6. Схемы включения двигателей постоянного тока при регулировании частоты вращения изменением напряжения в цепи якоря
Изменение напряжения в цепи якоря позволяет регулировать частоту вращения двигателя вниз от номинальной, так как напряжение свыше номинального недопустимо. При необходимости регулировать частоту вращения вверх от номинальной можно воспользоваться изменением тока возбуждения двигателя.
Изменение направления вращения (реверс) двигателя, работающего по системе Г—Д, осуществляется изменением направления тока в цепи возбуждения генератора Г переключателем П, т. е. переменой полярности напряжения на его зажимах. Если двигатель постоянного тока работает в условиях резко переменной нагрузки, то для смягчения колебаний мощности, потребляемой ПД из трехфазной сети, на вал ПД помещают маховик М, который запасает энергию в период уменьшения нагрузки на двигатель Д и отдает ее в период интенсивной нагрузки двигателя.
Регулирование частоты вращения изменением напряжения в цепи якоря обеспечивает плавное экономичное регулирование в широком диапазоне nMAX/nMIN ≥ 25 . Наибольшая частота вращения здесь ограничивается условиями коммутации, а наименьшая — условиями охлаждения двигателя.
Еще одним достоинством рассматриваемого способа регулирования является то, что он допускает безреостатный пуск двигателя при пониженном напряжении.
Импульсное регулирование частоты вращения ДПТ НВ
Сущность этого способа регулирования иллюстрируется схемой, изображенной на рис. 29.7, а. Цепь обмотки якоря двигателя параллельного (независимого) возбуждения периодически прерывается ключом К. Во время замыкания цепи якоря на время t к обмотке якоря подводится напряжение U = Uимпи ток в ней достигает значения Iamax. Затем ключом К цепь якоря размыкают и ток в ней убывает, достигая к моменту следующего замыкания цепи значения Iamin (при размыкании ключа К ток в обмотке якоря замыкается через диод VD). При следующем замыкании ключа К ток достигает значения Iamax и т. д. Таким образом, к обмотке якоря подводится некоторое среднее напряжение
![]() , (29.13)
, (29.13)
где Т— отрезок времени между двумя следующими друг за другом импульсами напряжения (рис. 29.7, б); ![]() — коэффициент управления.
— коэффициент управления.
При этом в обмотке якоря проходит ток, среднее значение которого ![]() .
.
При импульсном регулировании частота вращения двигателя
![clip_image002[43]](https://electrikam.com/wp-content/uploads/2014/10/clip_image00243_thumb.gif "clip_image002[43]") . (29.14)
. (29.14)
Таким образом, импульсное регулирование частоты вращения аналогично регулированию изменением подводимого к цепи якоря напряжения. С целью уменьшения пульсаций тока в цепи якоря включена катушка индуктивности (дроссель) ![]() , а частота подачи импульсов равна 200—400 Гц.
, а частота подачи импульсов равна 200—400 Гц.
На рис. 29.7, в представлена одна из возможных схем импульсного регулирования, где в качестве ключа применен управляемый диод — тиристор VS. Открывается тиристор подачей кратковременного импульса от генератора импульсов (ГИ) на управляющий электрод (УЭ) тиристора. Цепь L1C, шунтирующая тиристор, служит для запирания последнего в период между двумя управляющими импульсами. Происходит это следующим образом: при открывании тиристора конденсатор С перезаряжается через контур L1C и создает на силовых электродах тиристора напряжение, обратное напряжению сети, которое прекращает протекание тока через тиристор. Параметрами цепи L1C определяется время (с) открытого состояния тиристора: ![]() . Здесь L1 выражается в генри (Гн); С — в фарадах (Ф).
. Здесь L1 выражается в генри (Гн); С — в фарадах (Ф).
Рис. 29.7. Импульсное регулирование частоты вращения двигателя постоянного тока
Значение среднего напряжения Uср регулируется изменением частоты следования управляющих импульсов от генератора импульсов на тиристор VS.
Жесткие механические характеристики и возможность плавного регулирования частоты вращения в широком диапазоне определили области применения двигателей независимого возбуждения в станочных приводах, вентиляторах, а также во многих других случаях регулируемого электропривода, где требуется устойчивая работа при колебаниях нагрузки.
Регулирование частоты вращения. Частоту вращения электродвигателей постоянного тока регулируют: введением резисторов в цепь якоря двигателя; изменением магнитного потока; изменением напряжения, приложенного к якорю электродвигателя.
В зависимости от способа регулирования частоты вращения получаются различные искусственные механические характеристики.
При введении резисторов в цепь якоря у двигателей с независимым и параллельным возбуждением магнитный поток не изменяется, следовательно, остается постоянной частота вращения идеального холостого хода nx, но значение сопротивления вводимого резистора оказывает большое влияние на наклон механической характеристики, так как возрастает угловой коэффициент:
Поэтому искусственная механическая характеристика двигателей с независимым и параллельным возбуждением представляет собой прямую линию 1 (рис. 2.3), проходящую через одну точку nx с естественной характеристикой 0 и наклоном β1, определяемым значением сопротивления вводимого резистора.

Рис. 2.3. Механические характеристики электродвигателя с параллельным возбуждением
Изменение сопротивления цепи якоря для двигателя с последовательным возбуждением приведет к смещению характеристики вниз в сторону уменьшения n.
Магнитный поток электродвигателей можно изменить введением дополнительного резистора в цепь обмотки возбуждения, причем уменьшаются ток возбуждения и магнитный поток двигателя.
Изменение магнитного потока приводит к увеличению частоты вращения идеального холостого хода и изменению наклона механической характеристики у двигателей с независимым, параллельным и смешанным возбуждением.
Действительно, если Ф = Ф0, то для естественной характеристики
Таким образом, искусственная механическая характеристика, полученная при введении резистора в цепь обмотки возбуждения двигателя, располагается выше естественной (характеристика 2), частота вращения идеального холостого хода и наклон характеристики увеличиваются.
Изменение питающего цепь якоря напряжения при неизменном напряжении в цепи независимой обмотки возбуждения приводит у двигателей с независимым возбуждением к изменению частоты вращения идеального холостого хода при неизменном наклоне характеристики.

Следовательно, искусственная характеристика расположится ниже естественной и будет параллельна ей (характеристика 3). У двигателя, имеющего смешанное возбуждение, искусственная характеристика также будет ниже естественной.
Анализируя полученные механические характеристики электродвигателей постоянного тока, можно установить, что при одном и том же моменте на валу электродвигателя частота вращения его на разных характеристиках будет различной. Поэтому частоту вращения электродвигателей регулируют способами, используемыми для получения искусственных характеристик. Различают параметрическое и импульсное регулирование.
При параметрическом способе изменяется какой-либо параметр, который далее остается неизменным. Импульсное регулирование характеризуется периодическим ступенчатым изменением какого-либо параметра с определенной частотой.
Каждому из параметрических способов присущи свои особенности, определившие область их применения.
Введение резистора в цепь якоря приводит к уменьшению частоты вращения, причем эффективность регулирования тем больше, чем больше нагружен двигатель. Способ не экономичен из-за больших потерь энергии в дополнительном резисторе, но все же используется вследствие его простоты.
Введение резистора в цепь обмотки возбуждения приводит к увеличению частоты вращения. Этот способ экономичен, так как ток возбуждения составляет 2—5 % тока якоря и потери в резисторе невелики. Однако этот способ не позволяет получить частоту вращения двигателя меньше номинальной.
Изменение приложенного к якорю напряжения — наиболее удачный способ регулирования. Он экономичен и допускает регулирование частоты вращения в достаточно широких пределах при любых значениях нагрузки, но требует автономных источников питания с широким диапазоном изменения напряжения. Поэтому его целесообразно применять для электроприводов с частыми пусками и большим диапазоном регулирования частоты вращения электродвигателя (рулевые электроприводы, электроприводы оперативных лебедок земснарядов, гребные электрические установки и т.п.). Автономным источником питания может служить генератор постоянного тока с независимым возбуждением. Напряжение можно регулировать с помощью управляемого выпрямителя или магнитного усилителя.
Из импульсных способов регулирования двигателей постоянного тока наиболее широкое распространение получил способ изменения времени включения приложенного к якорю напряжения при постоянной частоте включения. Этот способ называется широтно-импульсным. Среднее значение приложенного к якорю напряжения

Изменяя tp при постоянном Т (изменяя скважность), регулируют среднее значение приложенного к якорю двигателя напряжения и частоту вращения электродвигателя. Частоту включения обычно выбирают в пределах 500—1000 Гц. Возможен другой способ импульсного регулирования, когда время включения tр остается постоянным, а период Т изменяется. Такой способ принято называть частотно-импульсным.
Импульсное регулирование электродвигателей постоянного тока является перспективным для тех электроприводов, для которых применяется регулирование изменением приложенного к якорю напряжения. Основным недостатком этого способа является большое число включений, приводящих к появлению больших переходных токов и требующих специальной аппаратуры.
Пуск электродвигателей постоянного тока. Как известно из курса электротехники, вращающий момент электродвигателя при пуске

Пусковой ток может значительно превышать номинальный ток двигателя из-за отсутствия противо-э. д. с. в момент пуска.
При пуске все дополнительные резисторы в цепях независимой и параллельной обмоток возбуждения должны быть введены и последовательная обмотка не шунтирована.
Отечественная промышленность изготовляет электродвигатели, пусковой ток которых по условиям коммутации должен удовлетворять неравенству Iя.п≤2,5Iя.ном.
При этом наибольший пусковой момент двигателей с независимым и параллельным возбуждением при Ф = const будет также Мп≤2,5Мном.
При таком же пусковом токе у двигателей со смешанным и последовательным возбуждением пусковой момент будет несколько больше вследствие увеличения магнитного потока, создаваемого последователь ной обмоткой, по сравнению с номинальным.
По мере увеличения частоты вращения двигателя растет противо- э.д.с., что приводит к уменьшению тока якоря
следовательно, будет уменьшаться вращающий момент двигателя.
Для обеспечения наиболее быстрого разгона двигателя необходимо поддерживать при пуске момент и ток якоря в определенных пределах.
Различают следующие способы пуска электродвигателей постоянного тока: прямой, с ограничением пусковых токов вследствие изменения сопротивления цепи якоря и импульсный.
Прямой пуск осуществляется непосредственно включением двигателя на полное напряжение сети при отсутствии добавочных элементов в цепях якоря и возбуждения. Преимуществами этого способа являются его простота и отсутствие дополнительной пусковой аппаратуры, недостатком — большой ток в цепи якоря в первоначальный момент пуска, что вызывает искрение на коллекторе, возникновение значительного момента на валу двигателя и колебания напряжения в судовой сети. Прямой пуск применяют для двигателей постоянного тока мощностью не более 1,5 кВт.
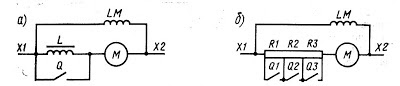
Рис. 2.4. Пуск двигателя постоянного тока
Параметрический пуск основан на предварительном изменении какого-либо параметра двигателя, ограничивающего пусковой ток, с последующим его приведением в процессе пуска к значению соответствующему номинальному режиму.
Для двигателей небольшой мощности применяют пуск с помощью реактора L, включенного последовательно в цепь якоря двигателя (рис. 2.4, а). При правильно подобранной индуктивности реактора время нарастания тока, определяемое электромагнитной постоянной времени электрической цепи,
T = (Lя+L)/Rя
соизмеримо с временем разгона электродвигателя, что значительно снижает пик пускового тока. Недостатками этого способа являются большие габаритные размеры и масса пускового реактора.
Наибольшее применение получил реостатный способ пуска, при этом способе в цепь якоря для ограничения пусковых токов включают дополнительный реостат (рис. 2.4, б), состоящий из трех-четырех резисторов. По мере разгона электродвигателя секции реостата поочередно закорачивают.
В некоторых случаях пользуются способом пуска, основанным на ступенчатом или плавном изменении напряжения, приложенного к якорю двигателя, от нуля до номинального значения. Этот способ возможен при питании якоря электродвигателя от отдельного источника с регулируемым напряжением. В качестве такого источника могут быть использованы генератор постоянного тока с независимым возбуждением, регулируемый трансформатор с выпрямителем, трансформатор с управляемым выпрямителем.
При импульсном пуске, так же как и при импульсном регулировании частоты вращения, может быть использован как широтно-импульсный, так и частотно-импульсный способ. В том и другом случае пуск осуществляется изменением скважности от нуля до номинального значения.
Реверсирование электродвигателей постоянного тока. Реверсирование— изменение направления вращения на противоположное. Для реверсирования необходимо изменить направление вращающего момента М = СмФIя, что возможно осуществить изменением направления тока в якоре электродвигателя или изменением направления магнитного потока путем изменения направления тока в обмотках возбуждения.
Для двигателей с независимым и параллельным возбуждением предпочтительнее первый способ по сравнению со вторым по сле-дующим причинам:
во-первых, при размыкании обмотки возбуждения, предшествующем ее переключению, возникает значительная э. д. с. самоиндукции
затрудняющая процесс коммутации и увеличивающая вероятность пробоя изоляции;
во-вторых, при реверсировании двигатель сначала необходимо остановить, а затем он начинает вращаться в обратную сторону. Но уменьшение магнитного потока вызовет не уменьшение, а увеличение частоты вращения.
Для двигателей со смешанным возбуждением реверсирование изменением направления магнитного потока еще более затруднено по сравнению с двигателем с параллельным возбуждением, так как у него необходимо переключать две обмотки возбуждения. Для двигателей с последовательным возбуждением оба способа равноценны.
Торможение электродвигателей постоянного тока. При режиме торможения электромагнитный момент на валу электродвигателя направлен в сторону, противоположную направлению вращения.
Режимы торможения используются, когда необходимо: остановить электропривод, вращающийся по инерции; остановить электропривод, вращающийся под действием момента, создаваемого рабочей машиной, например: под действием опускаемого подъемным краном груза; замедлить вращение электропривода при воздействии момента, создаваемого рабочей машиной.
Чтобы осуществить режим торможения электродвигателя, нужно изменить направление вращающего момента на его валу, при этом двигатель переходит в генераторный режим работы. В зависимости от использования энергии различают три вида торможения: рекуперативное, динамическое и противовключением. Рекуперативное торможение сопровождается возвратом энергии в питающую сеть. При динамическом торможении и торможении противовключением энергия превращается в тепловую в элементах цепи якоря двигателя.
Торможение с отдачей энергии в сеть, или рекуперативное торможение, наступает, тогда, когда электродвигатель под действием момента рабочей машины (идущий под уклон железнодорожный состав, опускающийся на подъемном кране груз) разгоняется до частоты вращения, превышающей частоту вращения идеального холостого хода. В этом случае э.д.с. якоря будет больше напряжения в сети, ток изменит свое направление и машина будет работать в режиме генератора, отдавая энергию в сеть. При этом направление вращения двигателя не изменится. Механическая характеристика двигателя с параллельным возбуждением О (рис. 2.5) при торможении с отдачей энергии в сеть будет являться продолжением характеристики

Рис. 2.5. Механические характеристики двигателя постоянного тока при рекуперативном торможении
в область отрицательных моментов. Область режима торможения обозначена цифрой II, область двигательного режима — цифрой I.
У двигателей со смешанным возбуждением при переходе в режим торможения ток в последовательной обмотке меняет свое направление, и поэтому она противодействует параллельной обмотке, размагничивая машину и уменьшая момент торможения (штриховая линия). Во избежание этого последовательную обмотку закорачивают или отключают (характеристика I).
Двигатели с последовательным возбуждением не могут работать в режиме торможения с отдачей энергии в сеть, так как с увеличением частоты вращения ток двигателя уменьшается и он размагничивается. Его э.д.с. никогда не может быть больше напряжения в сети.
Динамическое торможение осуществляют отключением якоря от сети и замыканием его на резистор. Различают два вида динамического торможения: с независимым возбуждением и с самовозбуждением.

Рис. 2.6. Схемы включения и механические характеристики двигателей при динамическом торможении
При торможении двигателей с независимым и параллельным возбуждением применяют торможение с независимым возбуждением (рис. 2.6, а).
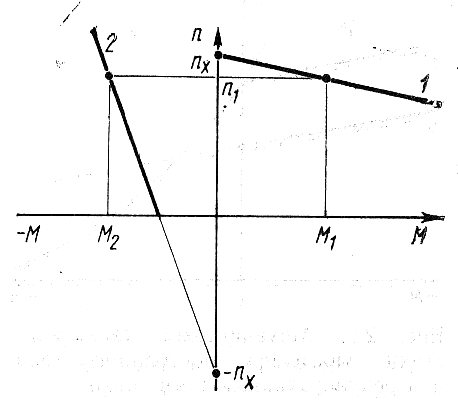
Рис. 2.7. Механическая характеристика двигателя постоянного тока с параллельным возбуждением при торможении противовключением
В этом случае якорь Двигателя отключается от питающей сети и включается на тормозной резистор R1, обмотка возбуждения остается включенной в сеть.
У двигателя со смешанным возбуждением последовательная обмотка отключается или закорачивается.
Торможение двигателя с последовательным возбуждением при питании обмотки возбуждения от сети (рис. 2.6, б) более эффективно, чем торможение с самовозбуждением (рис. 2.6, в), однако для ограничения тока в обмотке необходимо ее подключать через дополнительный резистор R2, мощность рассеяния которого должна равняться мощности электродвигателя
Уравнение механической характеристики при динамическом торможении (при U = 0)
При Ф = const (независимое возбуждение) оно представляет собой уравнение прямой линии.
При самовозбуждении в связи с изменением магнитного потока характеристика искривляется, а при некотором значении частоты вращения самовозбуждение и торможение двигателя прекращаются.
На рис. 2.6, г показаны механические характеристики для динамического торможения: 0 — для торможения с независимым возбуждением; 1 — для торможения с самовозбуждением. Штриховой линией показан участок, на котором торможение прекращается.
Торможение противовключением производится быстрым реверсированием двигателя по ходу, когда якорь по инерции продолжает вращаться в одном направлении, а обмотки включаются на противоположное. При этих режимах знаки пх и п противоположны, э. д. с. якоря двигателя совпадает по направлению с напряжением и ток якоря
так как в начале торможения Е ≈ U, сопротивление резистора R1 необходимое для ограничения тока до допустимых пределов, должно быть примерно в 2 раза больше пускового сопротивления двигателя. Механическая характеристика при этом способе торможения двигателя с параллельным возбуждением приведена на рис. 2.7 (характеристика 2).
Если двигатель предварительно работал с М1>0 и n1>0 на характеристике 1, то при торможении противовключением уравнение механической характеристики будет

При быстром реверсировании частота вращения двигателя не успеет измениться и режим торможения будет соответствовать точке с моментом М2 и частотой вращения n1 на характеристике 2.
Из рис. 2.7 видно, что при торможении противовключением в момент остановки двигателя (n = 0) момент на его валу не обращается в нуль. Поэтому после остановки двигатель может начать вращаться в обратную сторону. Во избежание этого двигатель после остановки должен быть отключен от сети.
Эра электродвигателей берёт своё начало с 30-х годов XIX века, когда Фарадей на опытах доказал способность вращения проводника, по которому проходит ток, вокруг постоянного магнита. На этом принципе Томасом Девенпортом был сконструирован и испытан первый электродвигатель постоянного тока. Изобретатель установил своё устройство на действующую модель поезда, доказав тем самым работоспособность электромотора.
Практическое применение ДПТ нашёл Б. С. Якоби, установив его на лодке для вращения лопастей. Источником тока учёному послужили 320 гальванических элементов. Несмотря на громоздкость оборудования, лодка могла плыть против течения, транспортируя 12 пассажиров на борту.
Лишь в конце XIX столетия синхронными электродвигателями начали оснащать промышленные машины. Этому способствовало осознание принципа преобразования электродвигателем постоянного тока механической энергии в электричество. То есть, используя электродвигатель в режиме генератора, удалось получать электроэнергию, производство которой оказалось существенно дешевле от затрат на выпуск гальванических элементов. С тех пор электродвигатели совершенствовались и стали завоёвывать прочные позиции во всех сферах нашей жизнедеятельности.
Устройство и описание ДПТ
Конструктивно электродвигатель постоянного тока устроен по принципу взаимодействия магнитных полей.
Самый простой ДПТ состоит из следующих основных узлов:
- Двух обмоток с сердечниками, соединенных последовательно. Данная конструкция расположена на валу и образует узел, называемый ротором или якорем.
- Двух постоянных магнитов, повёрнутых разными полюсами к обмоткам. Они выполняют задачу неподвижного статора.
- Коллектора – двух полукруглых, изолированных пластин, расположенных на валу ДПТ.
- Двух неподвижных контактных элементов (щёток), предназначенных для передачи электротока через коллектор до обмоток возбуждения.

Рассмотренный выше пример – это скорее рабочая модель коллекторного электродвигателя. На практике такие устройства не применяются. Дело в том, что у такого моторчика слишком маленькая мощность. Он работает рывками, особенно при подключении механической нагрузки.
Статор (индуктор)
В моделях мощных современных двигателях постоянного тока используются статоры, они же индукторы, в виде катушек, намотанных на сердечники. При замыкании электрической цепи происходит образование линий магнитного поля, под действием возникающей электромагнитной индукции.
Для запитывания обмоток индуктора ДПТ могут использоваться различные схемы подключения:
- с независимым возбуждением обмоток;
- соединение параллельно обмоткам якоря;
- варианты с последовательным возбуждением катушек ротора и статора;
- смешанное подсоединение.
Схемы подключения наглядно видно на рисунке 2.

У каждого способа есть свои преимущества и недостатки. Часто способ подключения диктуется условиями, в которых предстоит эксплуатация электродвигателя постоянного тока. В частности, если требуется уменьшить искрения коллектора, то применяют параллельное соединение. Для увеличения крутящего момента лучше использовать схемы с последовательным подключением обмоток. Наличие высоких пусковых токов создаёт повышенную электрическую мощность в момент запуска мотора. Данный способ подходит для двигателя постоянного тока, интенсивно работающего в кратковременном режиме, например для стартера. В таком режиме работы детали электродвигателя не успевают перегреться, поэтому износ их незначителен.
Ротор (якорь)
В рассмотренном выше примере примитивного электромотора ротор состоит из двухзубцового якоря на одной обмотке, с чётко выраженными полюсами. Конструкция обеспечивает вращение вала электромотора.
В описанном устройстве есть существенный недостаток: при остановке вращения якоря, его обмотки занимают устойчивое. Для повторного запуска электродвигателя требуется сообщить валу некий крутящий момент.
Этого серьёзного недостатка лишён якорь с тремя и большим количеством обмоток. На рисунке 3 показано изображение трёхобмоточного ротора, а на рис. 4 – якорь с большим количеством обмоток.


Подобные роторы довольно часто встречаются в небольших маломощных электродвигателях.
Для построения мощных тяговых электродвигателей и с целью повышения стабильности частоты вращения используют якоря с большим количеством обмоток. Схема такого двигателя показана на рисунке 5.

Коллектор
Если на выводы обмоток ротора подключить источник постоянного тока, якорь сделает пол-оборота и остановится. Для продолжения процесса вращения необходимо поменять полярность подводимого тока. Устройство, выполняющее функции переключения тока с целью изменения полярности на выводах обмоток, называется коллектором.
Самый простой коллектор состоит из двух, изолированных полукруглых пластин. Каждая из них в определённый момент контактирует со щёткой, с которой снимается напряжение. Одна ламель всегда подсоединена к плюсу, а вторая – к минусу. При повороте вала на 180º пластины коллектора меняются местами, вследствие чего происходит новая коммутация со сменой полярности.
Такой же принцип коммутации питания обмоток используются во всех коллекторах, в т. ч. и в устройствах с большим количеством ламелей (по паре на каждую обмотку). Таким образом, коллектор обеспечивает коммутацию, необходимую для непрерывного вращения ротора.
В современных конструкциях коллектора ламели расположены по кругу таким образом, что каждая пластина соответствующей пары находится на диаметрально противоположной стороне. Цепь якоря коммутируется в результате изменения положения вала.
Принцип работы
Ещё со школьной скамьи мы помним, что на провод под напряжением, расположенный между полюсами магнита, действует выталкивающая сила. Происходит это потому, что вокруг проволоки образуется магнитное поле по всей его длине. В результате взаимодействия магнитных полей возникает результирующая «Амперова» сила:
F=B×I×L, где B означает величину магнитной индукции поля, I – сила тока, L – длина провода.
Вектор «Амперовой» всегда перпендикулярен до линий магнитных потоков между полюсами. Схематически принцип работы изображён на рис. 6.

Если вместо прямого проводника возьмём контурную рамку и подсоединим её к источнику тока, то она повернётся на 180º и остановится в в таком положении, в котором результирующая сила окажется равной 0. Попробуем подтолкнуть рамку. Она возвращается в исходное положение.
Поменяем полярность тока и повторим попытку: рамка сделала ещё пол-оборота. Логично припустить, что необходимо менять направление тока каждый раз, когда соответствующие витки обмоток проходят точки смены полюсов магнитов. Именно для этой цели и создан коллектор.
Схематически можно представить себе каждую якорную обмотку в виде отдельной контурной рамки. Если обмоток несколько, то в каждый момент времени одна из них подходит к магниту статора и оказывается под действием выталкивающей силы. Таким образом, поддерживается непрерывное вращение якоря.
Типы ДПТ
Существующие электродвигатели постоянного тока можно классифицировать по двум основным признакам: по наличию или отсутствию в конструкции мотора щеточно-коллекторного узла и по типу магнитной системы статора.
Рассмотрим основные отличия.
По наличию щеточно-коллекторного узла
Двигатели постоянного тока для коммутации обмоток, которых используются щёточно-коллекторные узлы, называются коллекторными. Они охватывают большой спектр линейки моделей электромоторов. Существуют двигатели, в конструкции которых применяется до 8 щёточно-коллекторных узлов.
Функции ротора может выполнять постоянный магнит, а ток от электрической сети подаётся непосредственно на обмотки статора. В таком варианте отпадает надобность в коллекторе, а проблемы, связанные с коммутацией, решаются с помощью электроники.
В таких бесколлекторных двигателях устранён один из недостатков –искрение, приводящее к интенсивному износу пластин коллектора и щёток. Кроме того, они проще в обслуживании и сохраняют все полезные характеристики ДПТ: простота в управлении связанном с регулировкой оборотов, высокие показатели КПД и другие. Бесколлекторные моторы носят название вентильных электродвигателей.
По виду конструкции магнитной системы статора
В конструкциях синхронных двигателей существуют модели с постоянными магнитами и ДПТ с обмотками возбуждения. Электродвигатели серий, в которых применяются статоры с потоком возбуждения от обмоток, довольно распространены. Они обеспечивают стабильную скорость вращения валов, высокую номинальную механическую мощность.
О способах подключения статорных обмоток шла речь выше. Ещё раз подчеркнём, что от выбора схемы подключения зависят электрические и тяговые характеристики двигателей постоянного тока. Они разные в последовательных обмотках и в катушках с параллельным возбуждением.
Управление
Не трудно понять, что если изменить полярность напряжения, то направление вращения якоря также изменится. Это позволяет легко управлять электромотором, манипулируя полярностью щеток.
Механическая характеристика
Рассмотрим график зависимости частоты от момента силы на валу. Мы видим прямую с отрицательным наклоном. Эта прямая выражает механическую характеристику электродвигателя постоянного тока. Для её построения выбирают определённое фиксированное напряжение, подведённое для питания обмоток ротора.

Регулировочная характеристика
Такая же прямая, но идущая с положительным наклоном, является графиком зависимости частоты вращения якоря от напряжения питания. Это и есть регулировочная характеристика синхронного двигателя.
Построение указанного графика осуществляется при определённом моменте развиваемом ДПТ.

Благодаря линейности характеристик упрощается управление электродвигателями постоянного тока. Поскольку сила F пропорциональна току, то изменяя его величину, например переменным сопротивлением, можно регулировать параметры работы электродвигателя.
Регулирование частоты вращения ротора легко осуществляется путём изменения напряжения. В коллекторных двигателях с помощью пусковых реостатов добиваются плавности увеличения оборотов, что особенно важно для тяговых двигателей. Это также один из эффективных способов торможения. Мало того, в режиме торможения синхронный электродвигатель вырабатывает электрическую энергию, которую можно возвращать в энергосеть.
Области применения
Перечислять все области применения электродвигателей можно бесконечно долго. Для примера назовём лишь несколько из них:
- бытовые и промышленные электроинструменты;
- автомобилестроение – стеклоподъёмники, вентиляторы и другая автоматика;
- трамваи, троллейбусы, электрокары, подъёмные краны и другие механизмы, для которых важны высокие параметры тяговых характеристик.
Преимущества и недостатки
К достоинствам относится:
- Линейная зависимость характеристик электродвигателей постоянного тока (прямые линии) упрощающие управление;
- Легко регулируемая частота вращения;
- хорошие пусковые характеристики;
- компактные размеры.
У асинхронных электродвигателей, являющихся двигателями переменного тока очень трудно достичь таких характеристик.
Недостатки:
- ограниченный ресурс коллектора и щёток;
- дополнительная трата времени на профилактическое обслуживание, связанное с поддержанием коллекторно-щёточных узлов;
- ввиду того, что мы пользуемся сетями с переменным напряжением, возникает необходимость выпрямления тока;
- дороговизна в изготовлении якорей.
По перечисленным параметрам из недостатков в выигрыше оказываются модели асинхронных двигателей. Однако во многих случаях применение электродвигателя постоянного тока является единственно возможным вариантом, не требующим усложнения электрической схемы.