Содержание
- Частотное регулирование
- Схемы регуляторов оборотов асинхронного двигателя
- Заключение
Асинхронные двигатели переменного тока являются самыми применяемыми электродвигателями абсолютно во всех хозяйственных сферах. В их преимуществах отмечается конструктивная простота и небольшая цена. При этом немаловажное значение имеет регулирование скорости асинхронного двигателя. Существующие способы показаны ниже.
Согласно структурной схеме скоростью электродвигателя можно управлять в двух направлениях, то есть изменением величин:
- скорость электромагнитного поля статора;
- скольжение двигателя.
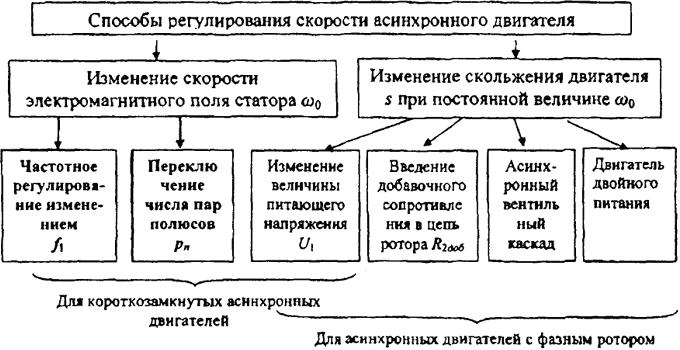
Первый вариант коррекции, используемый для моделей с короткозамкнутым ротором, осуществляется за счет изменения:
- частоты,
- количества полюсных пар,
- напряжения.
В основе второго варианта, применяемого для модификации с фазным ротором, лежат:
- изменение напряжения питания;
- присоединение элемента сопротивления в цепь ротора;
- использование вентильного каскада;
- применение двойного питания.
Вследствие развития силовой преобразовательной техники на текущий момент в широком масштабе изготовляются всевозможные виды частотников, что определило активное применение частотно-регулируемого привода. Рассмотрим наиболее распространённые методы.
Частотное регулирование
Всего десять лет назад в торговой сети регуляторов частоты вращения скорости ЭД было небольшое количество. Причиной тому служило то, что тогда ещё не производились дешёвые силовые высоковольтные транзисторы и модули.
На сегодня частотное преобразование – самый распространённый способ регулирования скорости двигателей. Трёхфазные преобразователи частоты создаются для управления 3-фазными электродвигателями.
Однофазные же двигатели управляются:
- специальными однофазными преобразователями частоты;
- 3-фазными преобразователями частоты с устранением конденсатора.
Схемы регуляторов оборотов асинхронного двигателя
Для двигателей повседневного предназначения легко можно выполнить необходимые расчеты, и своими руками произвести сборку устройства на полупроводниковой микросхеме. Пример схемы регулятора электродвигателя приведён ниже. Такая схема позволяет добиться контроля параметров приводной системы, затрат на техническое обслуживание, снижения потребления электричества наполовину.
Принципиальная схема регулятора оборотов вращения ЭД для повседневных нужд значительно упрощается, если применить так называемый симистор.
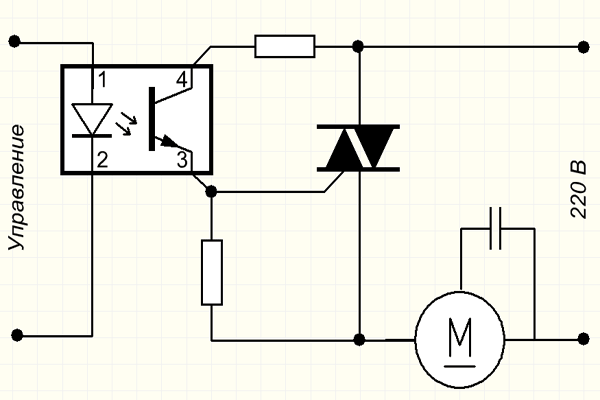
Обороты вращения ЭД регулируются с помощью потенциометра, определяющего фазу входного импульсного сигнала, открывающего симистор. На изображении видно, что в качестве ключей применяются два тиристора, подключённых встречно-параллельно. Тиристорный регулятор оборотов ЭД 220 В достаточно часто применяется для регулирования такой нагрузки, как диммеры, вентиляторы и нагревательная техника. От оборотов вращения асинхронного ЭД зависят технические показатели и эффективность работы двигательного оборудования.
Заключение
На технорынке сегодня предлагаются в большом ассортименте регуляторы и частотные преобразователи для асинхронных электродвигателей переменного тока.
Управление способом варьирования частоты на данный момент – самый оптимальный способ, т. к. он позволяет плавно регулировать скорость асинхронного ЭД в широчайшем диапазоне, без значительных потерь и снижения перегрузочных способностей.
Тем не менее, на основе расчёта, можно самостоятельно собрать простое и эффективное устройство с регулированием оборотов вращения однофазных электродвигателей с помощью тиристоров.
n2
=n1(1
— s) = (f160/
p)(l —
s).
(15.2)
Из
этого выражения следует, что частоту
вращения ротора асинхронного двигателя
можно регулировать изменением какой —
либо из трех величин: скольжения s,
частоты
тока в обмотке статора f1
или числа полюсов в обмотке статора 2р.
Регулирование
частоты вращения изменением скольжения
s
возможно
тремя способами: изменением подводимого
к обмотке статора напряжения, нарушением
симметрии этого напряжения и изменением
активного сопротивления обмотки ротора.
Регулировка
частоты вращения изменением скольжения
происходит только в нагруженном
двигателе. В режиме холостого хода
скольжение, а следовательно, и частота
вращения остаются практически неизменными.
Регулирование
частоты вращения изменением подводимого
напряжения. Возможность
этого способа регулирования подтверждается
графиками М = f(s),
построенными для разных значений U1
(см. рис. 13.5). При неизменной нагрузке на
валу двигателя увеличение подводимого
к двигателю напряжения вызывает рост
частоты вращения. Однако диапазон
регулирования частоты вращения
получается небольшим, что объясняется
узкой зоной устойчивой работы двигателя,
ограниченным значением критического
скольжения и недопустимостью значительного
превышения номинального значения
напряжения. Последнее объясняется тем,
что с превышением номинального напряжения
возникает опасность чрезмерного
перегрева двигателя, вызванного резким
увеличением электрических и магнитных
потерь. В то же время с уменьшением
напряжения U1
двигатель
утрачивает перегрузочную способность,
которая, как известно, пропорциональна
квадрату напряжения сети (см. § 13.2).
Подводимое к
двигателю напряжение изменяют либо
регулировочным автотрансформатором,
либо реакторами, включаемыми в разрыв
линейных проводов.
Узкий
диапазон регулирования и неэкономичность
(необходимость в дополнительных
устройствах) ограничивают область
применения этого способа регулирования
частоты вращения.
Регулирование
частоты вращения нарушением симметрии
подводимого напряжения. При
нарушении симметрии подводимой к
двигателю трехфазной системы напряжения
вращающееся поле статора становится
эллиптическим (см. § 9.4). При этом поле
приобретает обратную составляющую
(встречное поле), которая создает
момент Мобр,
направленный встречно вращающему
моменту Мпр.
В итоге результирующий электромагнитный
момент двигателя уменьшается (М = Мпр
— Мобр).
Механические
характеристики двигателя при этом
способе регулирования располагаются
в зоне между характеристикой при
симметричном напряжении (рис. 15.10, а,
кривая 1) и характеристикой при однофазном
питании двигателя (кривая 2) — пределом
несимметрии трехфазного
напряжения.
Для
регулировки несимметрии подводимого
напряжения можно в цепь одной из фаз
включить однофазный регулировочный
автотрансформатор (AT)
(рис. 15.10, б). При уменьшении напряжения
па выходе AT
несимметрия увеличивается и частота
вращения ротора уменьшается. Недостатками
этого способа регулирования являются
узкая зона

Рис. 15.10. Механические
характеристики (а) и схема включения
(б) асинхронного двигателя при регулировании
частоты вращения изменением симметрии
трехфазной системы
регулирования и
уменьшение КПД двигателя по мере
увеличения несимметрии напряжения.
Обычно этот способ регулирования частоты
вращения применяют лишь в двигателях
малой мощности.
Регулирование
частоты вращения изменением активного
сопротивления в цепи ротора. Этот
способ регулирования частоты вращения
возможен лишь в двигателях с фазным
ротором. Механические характеристики
асинхронного двигателя, построенные
для различных значений активного
сопротивления цепи ротора (см. рис.
13.6), показывают, что с увеличением
активного сопротивления ротора
возрастает скольжение, соответствующее
заданному нагрузочному моменту.
Частота вращения двигателя при этом
уменьшается. Зависимость скольжения
(частоты вращения) от активного
сопротивления цепи ротора выражается
формулой, полученной преобразованием
(13.13):
s
= m1I/22
r’2/
(ω1
М).
(15.3)
Практически
изменение активного сопротивления цепи
ротора достигается включением в цепь
ротора регулировочного реостата (РР),
подобного пусковому реостату (ПР) (см.
рис. 15.2), но рассчитанного на длительный
режим работы. Электрические потери в
роторе пропорциональны скольжению (Рэ2
= sPэм),
поэтому уменьшение частоты вращения
(увеличение скольжения) сопровождается
ростом электрических потерь в цепи
ротора и снижением КПД двигателя. Так,
если при неизменном нагрузочном моменте
на валу двигателя увеличить скольжение
от 0,02 до 0,5, что соответствует
уменьшению частоты вращения примерно
вдвое, то потери в цепи ротора составят
почти половину электромагнитной
мощности двигателя. Это свидетельствует
о неэкономичности рассматриваемого
способа регулирования. К тому же
необходимо иметь в виду, что рост потерь
в роторе сопровождается ухудшением
условий вентиляции из-за снижения
частоты вращения, что приводит к перегреву
двигателя (см. § 31.1).
Рассматриваемый
способ регулирования имеет еще и тот
недостаток, что участок механической
характеристики, соответствующий
устойчивой работе двигателя, при
введении в цепь ротора добавочного
сопротивления становится более
пологим и колебания нагрузочного
момента на валу двигателя сопровождаются
значительными изменениями частоты
вращения ротора. Это иллюстрирует
рис. 15.11, на котором видно, что если
нагрузочный момент двигателя изменится
на ΔМст= М/ст– М//ст,
то изменение частоты

Рис. 15.11. Влияние
сопротивления цепи ротора на
колебания частоты
вращения при изменении нагрузки
вращения
при выведенном регулировочном реостате
( rд‘
= 0 ) составит Δn2I,
а при введенном реостате — Δn2II.
В последнем случае изменение частоты
вращения значительно больше.
Но несмотря на
указанные недостатки, рассмотренный
способ регулирования частоты вращения
широко применяется в асинхронных
двигателях с фазным ротором. В зависимости
от конструкции регулировочного
реостата этот способ регулирования
частоты вращения может быть плавным
(при плавном изменении сопротивления
РР) или ступенчатым (при ступенчатом
изменении сопротивления РР).
Способ обеспечивает
регулирование частоты вращения в
широком диапазоне, но только вниз от
синхронной частоты вращения. Вместе
с тем он обеспечивает двигателю улучшенные
пусковые свойства (см. § 15.1).
Регулирование
частоты вращения изменением частоты
тока в статоре. Этот
способ регулирования (частотное
регулирование) основан на изменении
синхронной частоты вращения n1
= f1
60/ р
.
Для
осуществления этого способа регулирования
необходим источник питания двигателя
переменным током с регулируемой частотой.
В качестве таких источников могут
применяться электромашинные, ионные
или полупроводниковые преобразователи
частоты (ПЧ). Чтобы регулировать частоту
вращения, достаточно изменить частоту
тока f1.
Но с изменением частоты f1
= ω1p/
(2π) будет изменяться и максимальный
момент [см. (13.18)]. Поэтому для сохранения
неизменными перегрузочной способности,
коэффициента мощности и КПД двигателя
на требуемом уровне необходимо
одновременно с изменением частоты
f1
изменять и напряжение питания U1.
Характер одновременного изменения f1
и U1
зависит от закона изменения момента
нагрузки и определяется уравнением
U/1
/U1
= (f1
//f1)![]()
(15.4)
где
U1
и М — напряжение и момент при частоте
f1
; U’1
и М’ -напряжение и момент при частоте f
‘1.
Если
частота вращения двигателя регулируется
при условии постоянства момента нагрузки
( М = М’ = const),
то подводимое к двигателю напряжение
необходимо изменять пропорционально
изменению частоты тока:
U‘1
= U1
f
‘1/f1
(15.5)
При
этом мощность двигателя увеличивается
пропорционально нарастанию частоты
вращения. Если же регулирование
производится при условии постоянства
мощности двигателя ( Рэм
= Мω1
= const),
то подводимое напряжение следует
изменять в соответствии с законом
U‘1
= U1![]() .
.
(15.6)
Частотное
регулирование двигателей позволяет
плавно изменять частоту вращения в
широком диапазоне (до 12:1). Однако источники
питания с регулируемой частотой тока
удорожают установку. Поэтому частотное
регулирование до последнего времени
применялось в основном для одновременного
регулирования группы двигателей,
работающих в одинаковых условиях
(например, рольганговых двигателей).
Но благодаря развитию силовой
полупроводниковой техники в последние
годы созданы устройства частотного
регулирования, технико-экономические
показатели которых оправдывают их
индивидуальное применение для
регулирования частоты вращения
одиночных двигателей.
Использование
асинхронных двигателей, укомплектованных
такими устройствами для частотного
регулирования, наиболее целесообразно
в пожаро- и взрывоопасных средах
(химическая и нефтеперерабатывающая
промышленность), где применение
коллекторных двигателей (см. гл. 29)
недопустимо.
Регулирование частоты вращения
изменением числа полюсов обмотки
статора. Этот способ
регулирования частоты вращения дает
ступенчатую регулировку. Так, при
f1
=50 Гц и р = 1÷5 пар полюсов можно получить
следующие синхронные частоты вращения:
3000, 1500, 1000, 750, 600 об/мин.
Изменять
число полюсов в обмотке статора можно
либо укладкой
на
статоре двух обмоток с разным числом
полюсов, либо укладкой на статоре одной
обмотки, конструкция которой позволяет
путем переключения катушечных групп
получать различное число полюсов.
Последний способ получил наибольшее
применение.
Принцип
преобразования четырехполюсной обмотки
в двухполюсную (для одной фазы) показан
на рис. 15.12: при последовательном
согласном соединении двух катушек
возбуждаемое ими магнитное поле образует
четыре полюса (рис. 15.12, а); при
последовательном встречном (рис.
15.12, б) или параллельном соединениях
(рис. 15.12, в) — два полюса. Таким образом,
принцип образования полюсно переключаемой
обмотки основан на том, что
каждая фаза обмотки делится на части
(катушечные группы), изменяя

Рис 15.12. Схемы
включения обмотки статора
на
разное число
полюсов
схему соединения которых
получают разное число полюсов.
Возможны два
режима работы асинхронных двигателей
с полюсно переключаемыми обмотками:
режим
постоянного момента (рис. 15.13, а) — при
переключении двигателя с одной частоты
вращения на другую вращающий момент на
валу двигателя М2
остается неизменным, а мощность Р2
изменяется пропорционально частоте
вращения n2:

Рис. 15.13. Схемы переключения
числа полюсов и механические
характеристики в режимах постоянного
момента (а) и постоянной скорости (б)
Р2
= 0,105 М2
n2
(15.7)
режим
постоянной мощности (рис. 15.13, б) — при
переключении двигателя с одной частоты
вращения на другую мощность P2
остается примерно одинаковой, а момент
на валу M2
изменяется соответственно изменению
частоты вращения n2:
М2
=
9,55 Р2/
n2.
(15.8)
Если на статоре
расположить две полюсно переключаемые
обмотки, то получим четырехскоростной
двигатель. Однако возможно применение
и одной обмотки, допускающей путем
переключения катушечных групп
получение до четырех вариантов различных
чисел полюсов. Например, асинхронный
двигатель типа 4А180М12/8/6/4 имеет на
статоре обмотку, допускающую переключение
на 12,8,6,4 полюса.
Регулирование
частоты вращения изменением числа
полюсов на статоре применяют исключительно
в асинхронных двигателях с короткозамкнутым
ротором, так как число полюсов в обмотке
этого ротора всегда равно числу полюсов
статора и для изменения частоты вращения
достаточно изменить число полюсов в
обмотке ротора. В случае же фазного
ротора пришлось бы и на роторе применить
полюсно переключаемую обмотку, что
привело бы к недопустимому усложнению
двигателя.
Контрольные
вопросы
1.
Какими показателями характеризуются
пусковые свойства асинхронных двигателей?
2.
Каковы достоинства и недостатки пусковых
свойств асинхронных двигателей?
3. Как лучше, с точки
зрения улучшения пусковых свойств,
уменьшить пусковой ток: снижением
подводимого к двигателю напряжения или
увеличением активного сопротивления
в цепи обмотки ротора?
4. Каковы достоинства
и недостатки пуска асинхронных двигателей
непосредственным включением в сеть?
5. Какие существуют
способы пуска асинхронных двигателей
при пониженном напряжении?
6. В чем сущность
эффекта вытеснения тока и почему он
возникает при пуске двигателя и почти
исчезает при его работе?
7. Почему бутылочная
форма паза ротора способствует лучшему
проявлению эффекта вытеснения тока?
8. Перечислите
способы регулирования частоты вращения
асинхронных двигателей и дайте им
сравнительную оценку.
9. Почему при частотном
регулировании частоты вращения
одновременно с частотой тока необходимо
изменять напряжение?
Эксперт раздела «Вопрос электрику», автор статей.
Электромонтер по ремонту и обслуживанию электрооборудования, опыт работы более 5 лет.
Благодаря надежности и простоте конструкции асинхронные двигатели (АД) получили широкое распространение. В большинстве станков, промышленном и бытовом оборудовании применяются электродвигатели такого типа. Изменение скорости вращения АД производится механически (дополнительной нагрузкой на валу, балластом, передаточными механизмами, редукторами и т.д.) или электрическими способами. Электрическое регулирование более сложное, но и гораздо более удобное и универсальное.

Для многих агрегатов применяется именно электрическое управление. Оно обеспечивает точное и плавное регулирование пуска и работы двигателя. Электрическое управление производится за счет:
- изменения частоты тока;
- силы тока;
- уровня напряжения.
В этой статье мы рассмотрим популярные способы, как может осуществляться регулировка оборотов асинхронного двигателя на 220 и 380В.
- Изменение скорости АД с короткозамкнутым ротором
- Частотное регулирование
- Переключение числа пар полюсов
- Способы управления скоростью АД с фазным ротором
- Изменение питающего напряжения
- Активное сопротивление в цепи ротора
- Асинхронный вентильный каскад и машины двойного питания
- Плавный пуск асинхронных электродвигателей
- Как сделать устройство для изменения скорости вращения электродвигателя своими руками
Изменение скорости АД с короткозамкнутым ротором
Существует несколько способов:
- Управление вращением за счет изменения электромагнитного поля статора: частотное регулирование и изменение числа пар полюсов.
- Изменение скольжения электромотора за счет уменьшения или увеличения напряжения (может применяться для АД с фазным ротором).
Частотное регулирование
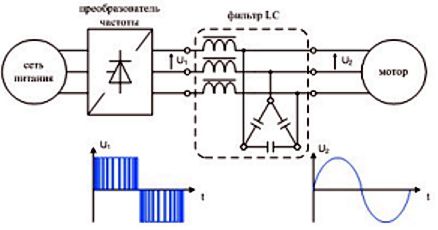
В данном случае регулировка производится с помощью подключенного к двигателю устройства для преобразования частоты. Для этого применяются мощные тиристорные преобразователи. Процесс частотного регулирования можно рассмотреть на примере формулы ЭДС трансформатора:
U1=4,44w1k1fΦ
Данное выражение означает, что для сохранения постоянного магнитного потока, означающего сохранение перегрузочной способности электромотора, следует одновременно с преобразованием частоты корректировать и уровень питающего напряжения. Если сохраняется выражение, вычисленное по формуле:
U1/f1=U’1/f’1
то это означает, что критический момент не изменен. А механические характеристики соответствуют рисунку ниже, если вы не понимаете, что значат эти характеристики, то в этом случае регулировка происходит без потери мощности и момента.
 Достоинствами данного метода являются:
Достоинствами данного метода являются:
- плавное регулирование;
- изменение скорости вращения ротора в большую и меньшую сторону;
- жесткие механические характеристики;
- экономичность.
Недостаток один — необходимость в частотном преобразователе, т.е. увеличение стоимости механизма. К слову, на современном рынке представлены модели с однофазным и трёхфазным входом, стоимость которых при мощности 2-3 кВт лежит в диапазоне 100-150 долларов, что не слишком дорого для полноценной регулировки привода станков в частной мастерской.
Переключение числа пар полюсов
Данный метод применяется для многоскоростных двигателей со сложной обмоткой, позволяющей изменять число пар ее полюсов. Самое широкое применение получили двухскоростные, трехскоростные и четырехскоростные АД. Принцип регулировки проще всего рассмотреть на основе двухскоростного АД. В такой машине обмотка каждой фазы состоит из двух полуобмоток. Скорость вращения изменяется при подключении их последовательно или параллельно.

В четырехскоростном электродвигателе обмотка выполнена в виде двух независимых друг от друга частей. При изменении числа пар полюсов первой обмотки производится изменение скорости работы электромотора с 3000 до 1500 оборотов в минуту. При помощи второй обмотки производится регулировка вращения 1000 и 500 оборотов в минуту.
При изменении числа пар полюсов происходит и изменение критического момента. Для его сохранения неизменным, требуется одновременно с изменением числа пар полюсов регулировать и питающее напряжение, например, переключением схемы звезда-треугольник и их вариациями.
Достоинства данного метода:
- жесткие механические характеристики двигателя;
- высокий КПД.
Недостатки:
- ступенчатая регулировка;
- большой вес и габаритные размеры;
- высокая стоимость электромотора.
Способы управления скоростью АД с фазным ротором
Изменение скорости вращения АД с фазным ротором производится путем изменения скольжения. Рассмотрим основные варианты и способы.
Изменение питающего напряжения
Этот способ также применяется для АД с КЗ ротором. Асинхронный двигатель подключается через автотрансформатор или ЛАТР. Если уменьшать напряжение питания, частота вращения двигателя снизится.

Но такой режим уменьшает перегрузочную способность двигателя. Этот способ применяется для регулирования в пределах напряжения не выше номинального, так как увеличение номинального напряжения приведет к выходу электродвигателя из строя.
Активное сопротивление в цепи ротора
При использовании данного метода в цепь ротора подключается реостат или набор постоянных резисторов большой мощности. Данное устройство предназначено для плавного увеличения сопротивления.

Скольжение растет пропорционально увеличению сопротивления, а скорость вращения вала электромотора при этом снижается.

Достоинства:
- большой диапазон регулирования в сторону понижения скорости вращения.
Недостатки:
- снижение КПД;
- увеличение потерь;
- ухудшение механических характеристик.
Асинхронный вентильный каскад и машины двойного питания
Изменение скорости работы асинхронных электромоторов в данных случаях выполняется путем изменения скольжения. При этом скорость вращения электромагнитного поля неизменна. Напряжение подается напрямую на обмотки статора. Регулировка происходит за счет использования мощности скольжения, которая трансформируется в цепь ротора, и образует добавочную ЭДС. Такие методы используются только в специальных машинах и крупных промышленных устройствах.

Плавный пуск асинхронных электродвигателей
АД кроме безусловных преимуществ, обладают существенными недостатками. Это рывок на старте и большие пусковые токи, в 7 раз превышающие номинальные. Для мягкого старта электродвигателя используются следующие методы:
- переключение обмоток по схеме звезда – треугольник;
- включение электродвигателя через автотрансформатор;
- использование специализированных устройств для плавного пуска.
В большинстве частотных регуляторов есть функция плавного пуска двигателя. Это не только снижает пусковые токи, но и уменьшает нагрузки на исполнительные механизмы. Поэтому регулирование частоты и плавный пуск довольно сильно связаны между собой.
Как сделать устройство для изменения скорости вращения электродвигателя своими руками
Для регулировки маломощных однофазных АД можно использовать диммеры. Однако этот способ ненадежен и обладает серьезными недостатками: снижением КПД, серьезным перегревом устройства и опасностью повреждения двигателя.
Для надежного и качественного регулирования оборотов электродвигателей на 220В, лучше всего подходит частотное регулирование.
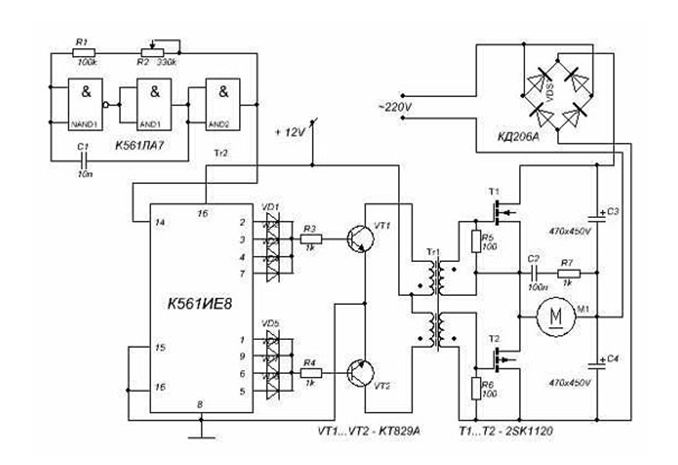
Приведенная ниже схема позволяет собрать частотное устройство для регулировки электромоторов мощностью до 500 Вт. Изменение скорости вращения производится в границах от 1000 до 4000 оборотов в минуту.
Устройство состоит из задающего генератора с изменяемой частотой, состоящего из мультивибратора, собранного на микросхеме К561ЛА7, счетчика на микросхеме К561ИЕ8, полумоста регулятора. Выходной трансформатор Т1 выполняет развязку верхнего и нижнего транзисторов полумоста.

Демпфирующая цепь С4, R7 гасит всплески напряжения опасные для силовых транзисторов VT3, VT4. Выпрямитель, удвоитель напряжения питающей сети, включает в себя диодный мост VD9, с конденсатором фильтра на которых происходит удвоение напряжения питания полумоста.
Напряжение первичной обмотки: 2х12В, вторичной обмотки 12В. Первичная обмотка трансформатора управления ключами, состоит из 120 витков медного провода сечением 0,7мм, с отводом от середины. Вторичная – две обмотки, каждая по 60 витков повода сечением 0,7 мм.
Вторичные обмотки необходимо максимально надежно заизолировать друг от друга, так как разница потенциалов между ними доходит до 640 В. Подключение выходных обмоток к затворам ключей производится в противофазе.
Вот мы и рассмотрели способы регулировки оборотов асинхронных двигателей. Если возникли вопросы, задавайте их в комментариях под статьей!
Материалы по теме:
- Как подключить трехфазный двигатель на 220 и 380 Вольт
- Типовые схемы и способы пуска синхронных двигателей
- 5 схем сборки самодельного светорегулятора
- Как выбрать диммер
Опубликовано 16.08.2019 Обновлено 17.06.2021 Пользователем Александр (администратор)