В процессе движения комбайна по полю мотовило движется поступательно с той же скоростью и одновременно вращается вокруг своей оси. В результате его планками совершается сложное движение (по трахоиде). Форма трахоиды зависит от выбранных технологических регулировок и имеет прямое влияние на величину потерь зерна.
Правильное взаимное расположение мотовила, режущего аппарата и транспортирующих механизмов жатки, а также правильно выбранный скоростной режим данных рабочих органов позволяют обеспечить минимальные потери не только срезанным колосом, но и свободным зерном.
Расположение мотовила по высоте должно быть таким, чтобы его планки при входе в хлебостой наносили удары по центру тяжести стебля – на расстояние 1/3 длины стебля от вершины колоса.
Низкое расположение мотовила приводит к опрокидыванию срезанных стеблей через планки вперёд либо нависанию над ними, что увеличивает потери зерна срезанным колосом.
Слишком высокая установка мотовила – планки наносят удары по колосу, как следствие, повышенные потери свободным зерном.

Рис. 1. Регулировка мотовила по выносу.

Рис. 2. Регулировка мотовила по высоте.
Важное значение имеет правильная установка мотовила по горизонтали. Стебли, захваченные планкой мотовила, должны удерживаться им до тех пор, пока не будут срезаны режущим аппаратом. Если в данном положении режущий аппарат будет расположен в точке (Б) [рис. 1], либо левее её, то выскальзывание стеблей не произойдёт. Выскальзывание стеблей из-под планки свидетельствует о неправильном расположении мотовила. Его ось должна быть вынесена несколько вперёд по отношению к ножу. Вынос мотовила по отношению к ножу на расстояние больше чем (а) [рис. 1], при уборке прямостоячих хлебов ухудшает работу мотовила (потери зерна за жаткой увеличиваются).
Ширина порции стеблей, подводимых одной планкой, определяется горизонтальным расстоянием между точками (М) и (К). В точке (М) планка входит в стебли, а в точке (К) она оказывается расположенной на одной вертикали с ножом. Ширина данного участка зависит от выноса мотовила и ширины петли. Эти величины (ориентировочно) связаны следующим соотношением:
b=1/2B+a(1-Vm/Vn), где
b – ширина участка стеблей, подводимых одной планкой;
B – ширина петли;
Vm – скорость движения комбайна (м/с);
Vn – окружная скорость мотовила (м/с);
a – вынос оси мотовила по отношению к режущему аппарату.
Следует помнить, что увеличением либо уменьшением ширины петли порции стеблей, подводимых одной планкой, при уборке прямостоячих (стандартных) хлебов со средней длиной стеблей потери свободным зерном возрастают.
Частота вращения мотовила выбирается таким образом, чтобы окружная скорость планок была выше поступательной скорости комбайна в 1,2-2 раза. Чем выше скорость комбайна, тем меньше должна быть величина данного отношения.
Установка мотовила в крайнее заднее положение производится при уборке прямостоячих и особенно короткостебельных хлебов.
В процессе уборки полёглых длинностебельных хлебов мотовило регулируется по высоте и выносу таким образом, чтобы оно приподнимало хлебную массу и подводило её к режущему аппарату. Если комбайн движется по направлению полегания стеблей, мотовило выносится вперёд и опускается. Чем больше полёглость и длиннее стебли, тем большим делают вынос мотовила. При движении комбайна навстречу полёглости мотовило приближают к режущему аппарату.
С целью облегчения подъёма стеблей и подведения массы к режущему аппарату при уборке полёглых хлебов планки мотовила снимаются, а граблины поворачиваются назад под углом 15 либо 30 град. в зависимости от степени полёглости; помимо этого устанавливаются стеблеподъёмники.
При уборке низкорослых хлебов планки размещают вертикально в нижнем положении. Зазор между концами граблин и пальцами режущего аппарата при данном положении планок должен составлять 20-25 мм, а между граблинами и шнеком – 15-20 мм.

Рис. 3. Проставка жатки комбайна «Дон».
1) – Датчик частоты вращения битера;
2) – Крылач электронного датчика;
3) – Гребёнка битера;
4) – Трубчатый вал;
5) – Рукоятка регулировки выхода пальцев;
6) – Ролик;
7) – Вал контрпривода жатки;
 – Палец;
– Палец;
9) – Битер проставки.

Рис. 4. Схема регулировки пальчикового механизма проставки.
5) – Рукоятка регулировки выхода пальцев;
– Палец;
9) – Битер проставки.
Проставка служит промежуточным звеном между жаткой и наклонной камерой. Оно состоит из корпуса и битера (9) [рис. 3], оснащённого пальчиковым эксцентриковым механизмом такой же конструкции, как и у шнека жатки.
Привод битера осуществляется посредством трансмиссионного вала через предохранительную фрикционную муфту, которая рассчитана на крутящий момент 600 Нм. На цапфе битера смонтирован крылач (2) электронного датчика (1), сигнализирующий об изменении частоты вращения либо остановке битера.
Регулировка зазора между пальцами и днищем проставки производится посредством поворота рукоятки (5) [рис. 4]. В средних условиях уборки данный зазор должен быть в пределах 28-35 мм.
16*
При
работе жатки планка мотовила совершает
сложное движение: переносное вместе с
машиной по полю со скоростью VM
и
относительное с угловой частотой .
Если оси координат расположить так, как
указано на рис. 3, и за исходное принять
горизонтальное положение луча С0А0,
то в произвольный момент центр мотовила
переместится в точку С, а луч повернется
на некоторый угол .
Проектируя точку А на оси координат,
можно получить
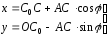 .
.
(1)
Рис.
3. Схема работы планки мотовила
Принимая
во внимание, что
 ,
,
а и
и ,
,
систему уравнений можно представить
иначе:
 , (2)
, (2)
где
H
— высота установки вала мотовила над
линией ножа;
h
— высота установки режущего аппарата.
Траектория,
описываемая параметрическими уравнениями
(2), представляет собой циклоиду, форма
которой зависит главным образом от
соотношений
окружной R
и поступательной VM
скорости планки (рис. 4).

|
|
Рис. |
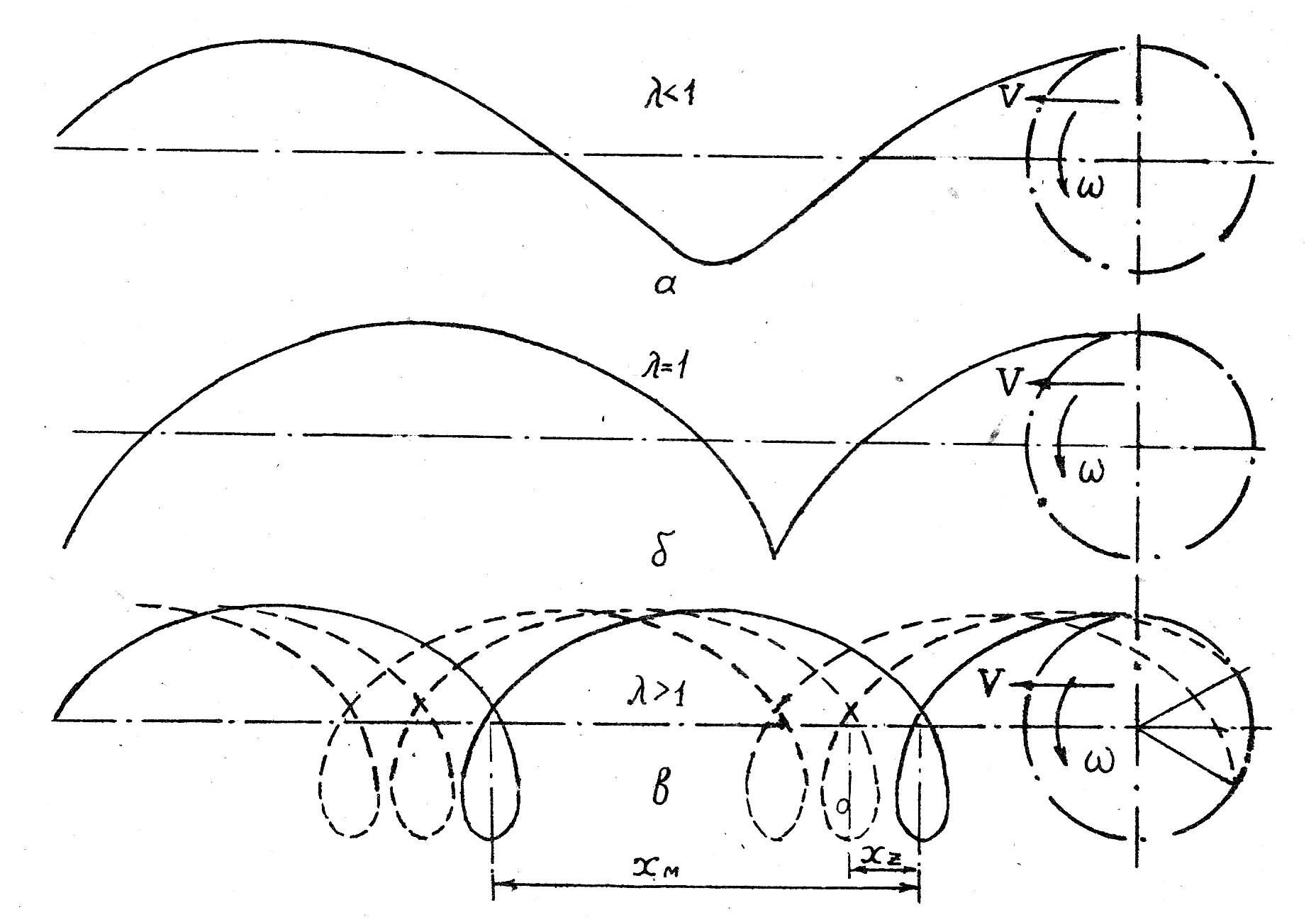
В
случаях (а) и (б) планка не может подводить
к режущему аппарату стебли растений,
а, следовательно, мотовило не может
оказаться работоспособным.
При
удлиненной циклоиде — трохоиде (в) на
участке A1B
(рис. 3) планки мотовила подводят стебли
к режущему аппарату. Таким образом,
чтобы мотовило было работоспособным,
необходимо выполнение условия
> 1. Когда жатка работает на обычной
скорости (VM
=
4…6 км/ч), кинематический коэффициент
стремятся установить в пределах
1,5…1,7.
На
повышенных значениях VM
коэффициент к приходится снижать до
1,2…1,4, так как иначе может происходить
выбивание планкой зерен из колоса.
При
уборке полеглых культур частоту вращения
необходимо увеличивать до =2…2,3.
Скорость машины при этом уменьшают так,
чтобы линейная скорость планки не
превышала допустимого значения по
условию невымолота зерен —

.
Высоким
значением ,
пользуются при настройке кормоуборочных
машин, так как опасность выколачивания
зерен в этом случае отсутствует. Для
изменения частоты вращения в системе
механизма привода мотовила устанавливают
обычно клиноременные вариаторы,
управляемые из кабины комбайна. С
изменением
меняется и другая характеристика
кинематики планок — шаг мотовила:
xz
= xм/z
= 2R/(
z), (3)
где
z
— число планок;
хм
— путь, пройденный машиной за время
одного полного оборота мотовила
хм
= 2R/,
так
как машина пройдет путь в ,
раз меньший, чем планка.
1.3. Условие входа планки в хлебную массу и обоснование параметров мотовила
Наиболее
эффективно мотовило будет использовано
в том случае, когда уровень поверхности
стеблестоя совпадет с максимальной
хордой трохоиды, так как в этом случае
планка захватит максимальное количество
стеблей. Характерным для этой точки
является равенство нулю горизонтальной
составляющей скорости планки, т. е.
Vx1
= 0.
Абсолютная
скорость планки при этом условии будет
направлена строго вниз, что также
облегчит вход планки в хлебную массу.
Если взять производную от уравнения
(2), описывающего перемещение планки по
оси х, то можно получить
для

,
откуда

. (4)
Найденный
угол
 входа в хлебную массу может быть обеспечен
входа в хлебную массу может быть обеспечен
лишь при определенных размерах мотовила
и высоте установки его оси (рис. 3):
H
+ h
= l+
R
sin1
,
или,
учитывая значение sin1
по уравнению (4),
H
= l
—
h + R/.
Ввиду
изменчивости l
и h
необходимо менять и высоту установки
мотовила Н:
Hmax
= lmax
— hmax+R/;
Hmin
= lmin
— hmin+R/,
(5)
так
как при высоком стеблестое обычно Н и
h
выбирают максимальными, и наоборот.
Когда мотовило опускают полностью вниз,
то приходится заботиться о том, чтобы
планки или граблины не касались режущего
аппарата, а между концами граблин и
ножом оставался зазор 2…3 см. Эта
регулировка осуществляется поворотом
винтовых вилок, к которым присоединяются
гидроцилиндры подъема мотовила. Иными
словами:
Hmin
= R
+
H.
Подставляя
это значение в формулу (5), можно получить:
R
+
H
= lmin
— hmin
+ R/;
R.
(
— 1)
= [lmin
— (hmin
+ H)];
R=
[/
(
— 1)]
[lmin
— (hmin
+
H)
] .
(6)
Правомерен
и другой подход к обоснованию радиуса
мотовила. При установке мотовила по
высоте обычно стремятся к тому, чтобы
планка в нижней точке не опускалась
ниже центра тяжести стебля, так как
иначе стебель может обвивать планку
или трубчатый вал граблин и наматываться
на них. Особенно часто это явление
наблюдается при уборке овса. В момент
входа планки в хлебную массу высота
центра мотовила равняется (рис. 3)
H
+ h=l+R-sin1
= l+
(R/),
а
когда планка опустится полностью вниз,
то
H
+ h
= 2l/3
+ R,
так
как приближенно можно считать, что центр
тяжести растения находится на расстоянии
1/3l
от вершины колоса. Приравнивая правые
части двух последних соотношений,
получим:
l+R/
= 2l/3
+ R;
R[
(
— 1)/,]
= l
–
2l/3;
R
[ (-
— 1) ]
= l/3;
R
= l/[3(
— 1)].
(7)
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
союз советсних
СОЦИАЛИСТИЧЕСКИХ
РЕСПУБЛИК
yg 4 А 01 D 41 12, 69/00
ОПИСАНИЕ ИЗОБРЕТЕНИЯ 1 „ и ABTGPCHGMV СВИДЕТЕЛЬСТВУ
ГОСУДАРСТВЕННЫЙ КОМИТЕТ СССР
ПО ДЕЛАМ ИЗОБРЕТЕНИЙ И ОТКРЫТИЙ (21) 3837742/30-15 (22) 31.10.84 (46) 07.05.86. Бюл. № 17 (71) Всероссийский ордена Трудового Красного Знамени научно-исследовательский и проектно-технологический институт механизации и электрификации сельского хозяйства (72) Ю. М. Сисюкин, В. П. Богданович, Г. Н. Сухов и В. В. Денисенко (53) 631.354.02 (088.8) (56) Авторское свидетельство СССР
¹ 904554, кл. А 01 D 41/12, 1980. (54) (57) СПОСОБ РЕГУЛИРОВАНИЯ ЧАСТОТЫ ВРАЩЕНИЯ МОТОВИЛА, включаюÄÄSUÄÄ 1228797 А1 щий измерение скорости движения зерноуборочной машины, частоты вращения мотовила, определение действительного и оптимального показателей кинематического режима, сравнение действительного показателя кинематического режима с оптимальным и установку частоты вращения мотовила по результатам сравнения, отличающийся тем, что, с целью снижения потерь урожая от воздействия мотовила, измеряют значение крутящего момента на его валу и находят его наименьшее значение, а оптимальный показатель кинематического режима определяют с учетом этого наименьшего значения крутящего момента.
1228797
Изобретение относится к области сельского хозяйства, в частности к способам регулирования частоты вращения мотовила жа ток и подборгциков уборочных машин, Цель изобретения — снижение потерь урожая от воздействия мотовила.
На фиг. 1 изображена схема последовательности операций при регулированиH частоты вращения мотовила по данному способу; на фиг. 2 — блок-схема устройства, реализующего данный способ; на фиг. 3 —алгоритм работы устройства; на фиг. 4 и 5 — графики, отражающие зависимость потерь зерна (кривая 1) и крутящего момента (кривая 11) от показателя кинематического режима при уборке ячменя и пшеницы соответственно.
Работа по данному способу осуществляется следующим образом.
В процессе уборки зерновых культур производят фиг. 1 измерение скорости движения V. уборочной машины и частоты вращения пп мотовила (l). По найденным значениям V. и п определяют действительное значение показателя кинематического реЧп жима (действие 2) авдее .. ==, где ° линейная скорость планок мотовила.
Оптимальное значение показателя кинематИЧЕСКОГО РЕжИМа топот НВХОДЯТ ПО НВИМЕНЬшему значению крутягцего момента на валу мотовила М.p;„(3) (фиг. 4 и 5) .
При этом QIITHMBJlbHBH частота вращсния мотовила и. о-. является функцией от V u
Мкр, т.е.
n. = f(V «p) при N«p — mirI.
СРВВНЕНИЕ топейст. С т опт. (4) ПОЗВОЛЯЕТ ОПределять необходимость в изменении частоты вращения мотовила. Значения Я лрдолжны находиться в пределах 1сЛ„,, что ограничивает области поиска значений и„„, Устройство фиг. 2 содержит датчик 1 измерения крутящего момента Мкр на валу мотовила, датчик 2 измерения скорости движения V. комбайна и датчик 3 измерения частоты вращения и мотовила. Датчик 1 соединен с Входом блока 4 определения текущих значений показателя кинематического режима, выход которого соединен с первым входом блока 5 определения текущего значения частоты вращения мотовила, при этом второй его вход соединен » выходом датчика 2 измерения скорости дижения комбайна, а выход — с первым входом блока 6 сравнения, второй вход которого соединен с выходом датчика 3 частоты вращения мотовила, причем выход блока 6 сравнения посредством исполнительнрго механизма 7 связан с датчиком 3 частоты вращения мотовила.
Устройство работает следующим образом.
В блок 4 введены начальное значение
Хо показателя кинематического режима и значение его дискретного изменения, которое т
4 f, 15
25 оQ
$5 зависит от допустиMQH ошибки регулирования частоты вращения мотовила. Значение
4 выбирается в интервале 1 — 1,1.
В момент начала движения зерноуборочНОИ МВШИНЫ Мкр = — 0, тсдсист = III H Пп
Ч с — В блоке 4 сразу после начала двитс1 ? жения зерноуборочной машины производит. сН определение текущих значений Х; с шагом ЛХ (алгоритм работы блока 4 представлен на фиг. 3), т е Х, = — Х 1 +
+ ЛХ. Каждое зна,»ение 4 поступает в блок 5.
Скорость движения комбайна измеряется датчиком 2, сигнал от которого поступает в блок 5. На основе значений 4 и V- определяется текущее значение частоты вращеV «Л1 ния M0ToBHÀH по заВисимости il.«;
Значе-IHB li«; пocf x HHQT в блок 6, где о«о сравнивается со значеHHeM частоты вращения мотовила и:. «-, измеряемым датчиком 3. Сигнал рассогласования из блока 6 поступает к исполнительному механизму 7, который устанавливает частоту вра1цения мотовила TI.«
Одновременно, после начала движения комоайн а, измеряется крутящий MQMI HT Мкр датчиком 1, сигнал or которого поступает также в блок 4. Как видно на фиг . 4 и
5 каждому значению Х, будет соответствовать разность значений крутящего момента
ЛМ«р1 — — Мкр,:-,— I I«pj.
По мере роста A., значения М р будут уменьшаться, а знак ЛМ«, будет сохраняться неизменным. По достижении Определенно О значения >., Значения М:р станут возрастать (фиг. 4 и 5) и, следовательно, ЛМ..р; поменяет 3HHH. В a «IropHTM работы блока 4 за <Ожена смена знака величины (фиг. 3). Поэтому цикл определения повторяется.
Значение ль соответствующее моменту изменения знака ЛМ р,, является оптимальным значением показателя кинематического режиМ а Aonx . УСТЯНОБЛЕНIЗОЕ ПО аоот. 3НЯЧЕНИЕ ЧВСтоты вращения мотовила также является
П коп-..
В дальнейшем устройстве. постоянно корРЕКтИРУЕт ЗНВЧЕНИЕ,о«СОГЛаСНО УСЛОВИЯМ
УбОРКИ И ПОДДЕРЖИВВЕТ ТВКИМ ООРВЗОМ Пп опт, На фиг. 3 показана блок-схема алгоритма работы блока 2 устройства (фиг. 2), который включает В себя следующие вычислительные операции. Операция 1 — ввод значений 1О и ЛХ. Затем производится задание начального значения крутящего момента
М;-, равное нулю (2). Операция 3 предназначена для организации цикла вычислений.
Операции 4 — -10 составляют цикл определения значения 4. На первом этапе цикла (операция 4) вычисляется г., путем суммирования предыдущего значения л, 1 с ЛХ (например, ХI = ?,о+ Л?.). Операция 5— ввод измеренных текущих значений крутящего момента ЛМкр. Приращение крутящего момента ЛМ ; определяется при операции б.
1228797
Во время операций 7 и 8 происходит присвоение последующих индексов значениям
М.й для уменьшения объема оперативной памяти устройства. Операция 9 — вычисление значения Х; с учетом знака ЛМйр, который в этой операции присваивается Ю,.
Циклическое увеличение индекса j tlpoucxoдит в операции 10. Затем следует переход на операцию 4, и цикл повторяется. После каждого выполнения операции 4 происходит вывод Х; в блок 5 устройства для ре,ули- fo рования частоты вращения мотовила.
В случае если зерноуборочная машина, выполняя технологический процесс уборки, движется по полю и будет включено устройство (фиг. 2), то последовательность процедуры определения Х-. будет аналогична описанной.
В реальных условиях эксплуатации зерноуборочной машины время, необходимое на установление и. -., определяется динамическими характеристиками исполнительного устройства 7 и не будет превышать 1,5 — 2 с после начала движения зерноуборочной машины.
Пример 1. Регулировку частоты врашения мотовила жатки комбайна «Дон — 1508» для уборки ячменя с наименьшими поте- 25 рями зерна после жатки производят следующим образом.
Измеряют скорость движения комбайна
Ч. и частоту вращения мотовила п» датчиками 1 — 3, сигналы от которых поступают на вход логического устройства, содержащего блоки 4 — 6 и установленного на комбайне. При проведении экспериментальных исследований скорость движения комбайна
V. = 2,7 км/ч, частота вращения мотовила и« = 28 об/мин.
Логическое устройство поступившие сигналы преобразует.
Определяют действительное значение показателя кинематического режима согласно зависимости:
1.действ. = = 0,00
Ч Ю Пм
= 2,19, к
Ag где V. — линейная скорость планок мотовила, м/с;
D < — диаметр мотовила, м.
Величину крутящего момента на валу мотовила измеряют с помощью датчика 1 крутящего момента, сигнал от которого попадают на второй вход блока 6 логического устройства, которое устанавливает вид зависимости М.й от л в данных условиях уборки. Эту зависимость М . = ((Х) периодически проверяют на соответствие условиям уборки. Поиск М й„,„„ производят путем сравнения текуших значений крутящего момента в зависимости от изменения частоты врашения мотовила по команде, поступаюшей исполнительному механизму для регулирования частоты вращения мотовила.
На фиг. 4 показана одна из зависимостей M.p — — 1(1.), при этом
М.р,„„= 120 нм, Хо ° = 2,3
Сравнивают значения 2.той.т.= 2,19 с AQIIT
=23. ТаК Как i rrйс —,. =, = топ . То ПРОВОДЯТ регулировку частоты вращения мотовила.
Оптимальную частоту врашения мотовила определяют из зависимости тсопт. Чк и — . — 0 06 1 — 30 об/мин.
Из блока б сравнения сигнал на изменение частоты вращения мотовила и поступает на исполнительный механизм.
Потери ячменя после жатки составляют
1 — 1,1 «/ю (фиг. 4).
Пример 2. Регулировку частоты вра.цения мотовила жатки того же комбайна (пример 1) при выборке пшеницы производят следующим образом: значения необходимых величин определяют по аналогии с примером 1: 4 = 2,8 км/ч;
Jl = 47 об/мин; 3….-r. = 3,54; М.йтт=
85 нм; лепт. = 3 1 (фиг. 4); стейт-. )
)).опт, ЧаСТОТа ВРашeиnЯ МОТОВИЛа СОСТавляет пт -. = 41 Oб/мин.
Устанавливают оптимальную частоту вращения мотовила. Потери пшеницы после жатки составляют q = 0,25 — 0,35ю (фиг. 5).
1228797
avano м;р, нИ д 4 по
/1/, Л/=Л/-f — /(6 о гО/7
Й кр .-еееее „е
/5П вЂ” 1 fÞ 5ее
i1 ф ее,.::,.
1″
77
) кр
C еЕ«
Яffy,,»;. g< е:е
СOCTclBHT«лв С. 3ар1 t(KJIH
Тскред И. 13epec Корректор В. Бутяга
Тираж 679 11одписное
ВНИИПИ Государственного комитета СССР по делам изобретений и открытий
i i3035, Москва, Ж 35. Раушская наб., д. 4/5
Филинеl ППП «Патент», г. Ужгород, ул. Г1роек-:ная, 4
Редактор Г. Гербер
Заказ 2208/1
1
ff ея
77 ,е
Х
/ е«




Перейти к содержанию
Регулировка мотовила. Основные признаки оптимального режима работы мотовила.
На чтение 3 мин. Просмотров 1.8k. Опубликовано 07.01.2011
Регулировка мотовила. Основные признаки оптимального режима работы мотовила:
срезанные растения надежно укладываются на транспортер жатки и не сдвигаются с него лопастями;
хлебная масса не задерживается на пальцевом брусе режущего аппарата;
лопасти заметно наклоняют растения к режущему аппарату;
мотовило воздействует на одни и те же растения не более чем одной лопастью.
Воздействия мотовила на одни и те же растения двумя и более планками свидетельствует об увеличении частоты вращения; отклонение растений планками от режущего аппарата — о пониженной частоте вращения мотовила. Частота вращения мотовила зависит от скорости перемещения машины. Установлено, что при работе со скоростью до 1,9 м1с отношение окружной скорости лопасти мотовила к скорости машины должно быть 1,6…1,7, а свыше — 1,2…1,4.
Для уборки прямостоячего хлебостоя, особенно низкорослого, мотовило приближают к линии ножа, устанавливая его ось над режущим аппаратом или с выносом вперед не более чем на 5…6 см. Для уборки высокорослых полегших хлебов мотовило (эксцентриковое) выносят до предела вперед. Это способствует подъему хлебной массы перед срезом.
По высоте мотовило устанавливают так, чтобы его планки нижней кромкой касались растений в зоне, удаленной от верхушки колоса, примерно на одну треть длины срезанного стебля.
Наклон граблин мотовила и положение деревянных планок на них должны соответствовать состоянию хлебостоя: 15° вперед — для уборки высокорослых густых хлебов; 0° — для уборки прямостоячих хлебов средней высоты и низкорослых; 15° и 30° назад—для уборки хлебов средне- и сильно полегших; на ровных хлебах деревянные лопасти закрепляют на граблинах в нижнем положении; при средней полеглости стеблей — в среднем положении, на уборке сильно полегших — лопасти снимают.
Выбор высоты среза. В зависимости от состояния хлебов высота среза должна соответствовать следующим показателям: низкорослые редкие хлеба высотой менее 50 см — 10…20 см, нормальные высотой более 80 см — 20… 23, легко обмолачиваемые и перестоявшие— 15…20 см.
Зазоры между спиралями шнека и днищем жатки комбайна уменьшают до 6 мм при обмолоте низкорослых и изреженных хлебов. При уборке высокорослых хлебов зазоры увеличивают до 35 мм.
Регулировка подборщика. Частоту вращения регулируют таким образом, чтобы окружная скорость концов пальцев подборщика была больше поступательной скорости комбайна в 1,5—2,5 раза. Если она слишком велика, то валок разрывается и зерно выбивается из колосьев пальцами. При . малой частоте вращения подборщика возможно сгруживание валка перед подборщиком.
По высоте подборщик регулируют опорными башмаками или катками. Когда валок лежит на высоком и густом жнивье, подборщик устанавливают так, чтобы трубы граблин в нижнем положении проходили на уровне основания валка. В этом случае пальцы будут всей своей длиной прочесывать пространство, расположенное ниже основания валка. Если валок уложен на низком жнивье или провалился, подборщик опускают так, чтобы концы пальцев при вращении проходили в непосредственной близости от поверхности почвы и полностью подбирали лежащие на земле стебли.
Уборочный сезон 2021 года уже «не за горами». Аграрии активно готовят технику к полевым операциям и задачам, а в ремонтных мастерских снова начинается работа по подготовке машинно-тракторного парка к уборочной страде.
Техническое обслуживание зерноуборочных комбайнов — сложный, энергозатратный и трудоемкий процесс. Однако фермеру стоит помнить, что к сезону стоит готовить не только «самоходку», но и навесные адаптеры — жатки, являющиеся без преувеличения «руками» техники и без которых сложный гигант становится, по-сути, бесполезным.
«ГлавПахарь» предлагает Вам ознакомиться с основными рекомендациями по эффективной настройке и регулировке жаток сплошного среза для зернокомбайнов.

Зерноуборочная жатка на комбайне Ростсельмаш
Конструкционные особенности зерновых жаток сплошного среза
Напомним, что зерновые жатки представляют собой специализированные адаптеры, предназначенные для скашивания сельскохозяйственных культур и транспортирования скошенной массы к молотилке комбайна (при прямом комбайнировании) или для укладки скошенной массы в валок (при раздельной уборке).
Жатка, в первую очередь, представляет собой приспособление для выполнения технологических операций скашивания или срезания стеблей растений. При этом данный тип является классическим вариантом, при том, что на рынке имеются модели альтернативных разработок с технологией очеса.
Но их мы рассматривать не будем, а поговорим о стандартных и наиболее популярных образцах и их строении.
Конструкционная схема стандартной модели жатки на зерноуборочном комбайне
К основным рабочим элементам жатки, как правило, относят мотовило, режущий аппарат, шнек, делитель и наклонный транспортер. К дополнительным опциональным узлам — устройства для работы системы копирования рельефа почвы и самовыравнивания, а также подвесные устройства и системы агрегатирования.
Если не брать в расчет очесывающее оборудование, которое воздействует на колосья, оставляя стебли нетронутыми, минимизируя расходы топлива и износ, то на рынке жатки сплошного среза для зерноуборочных комбайнов представлены в двух вариациях: шнековые (с подающим шнеком) и ленточные (валковые, полотняные, дреперные, платформерные и с ленточным транспортером). При этом они могут быть навесными, прицепными и самоходными.
Основные виды зерновых жаток сплошного среза. Фото: glavpahar.ru
Если говорить о самой технологии работы жатки, то с помощью мотовила стебли растений подводятся к режущему аппарату и удерживаются в определенном положении. Для зерноуборочных комбайнов мотовила могут быть копирующими, универсальными, эксцентриковыми, планчатыми. Это позволяет жатке легко захватывать даже самые маленькие стебли и подавать их на следующий функциональный узел.
Комбайн John Deere S785 с зерноуборочной жаткой на выставке БЕЛАГРО-2021
Режущий аппарат используется для срезания стеблей по принципу ножниц. Их лезвия и рабочие органы, как правило, изготовлены из стали или чугуна. Технология дополнительно использует противорежущие пластины.
Шнек предназначен для сбора скошенной массы и подачи ее к наклонному транспортеру. Благодаря сложной и продуманной конструкции шнека, он может захватывать даже далеко расположенные стебли.
Наклонный транспортер используется для транспортировки массы в камеру молотильного устройства.
Fendt оснастит зерноуборочные комбайны жатками Geringhoff
Общие рекомендации по настройке и регулировке зерновых жаток сплошного среза
Для получения высоких показателей и обеспечения наиболее эффективной работы агрегата, необходимо грамотно выполнить регулировку жатки зерноуборочного комбайна, а также ее дополнительных компонентов.
Для того чтобы подтвердить актуальность вопроса и необходимость внимания, которое стоит уделять специализированным зерновым адаптерам и узлам, обратимся к цифрам.
Аналитики и специалисты отрасли отмечают, что всего один час простоя зерноуборочного комбайна в период жатвы обходится фермерам в 0,15% потери урожая из-за осыпания. Кроме того, во время работы комбайна с неправильно отрегулированным уборочным оборудованием имеют место большие потери зерна за жаткой (платформой-подборщиком) и самим молотильным аппаратом, которые в сумме для изношенных на 95% комбайнов составляют до 24%, что не может не сказаться на эффективности работ в полевой сезон и прибыли аграриев.
Допустимый уровень потерь зерна за жаткой, как правило, предусмотрен нормативной документацией и прописан в технических условиях к машине. Для современных комбайнов показатели потерь обычно не превышают 0,8-1,2% за жаткой и 1,2-1,5% за молотильным аппаратом.
ВАЖНО! Жатка должна обеспечивать равномерную и правильную подачу массы и оптимизировать процесс уборки. При этом она должна копировать рельеф поля и адаптироваться к конкретным условиям эксплуатации, а не копировать комбайн!
Шаг 1: Регулировка мотовила и скорости его вращения
C чего начать? Первой и основной настройкой должна стать регулировка скорости вращения мотовила. Узел должен плавно подводить срезаемую массу к режущему аппарату. При малой скорости мотовила стебли как бы отталкиваются от режущего аппарата, затрудняя уборку, тогда как при большой может происходить выбивание планками мотовила зерна из колоса, что приводит к потерям на жатке.
При этом необходимо, чтобы по вертикали мотовило размещалось так, чтобы нижние граблины касались стеблей в точке, расположенной от верхушки колоса на одну треть длины стебля. Частоту вращения мотовила регулируют в зависимости от скорости движения комбайна. При небольших скоростях (до 7 км/ч) отношение линейной скорости мотовила к скорости движения комбайна должна составлять 1,4-1,7, а при увеличенных скоростях (более 7 км/ч) должна составлять 1,2-1,4.
Шаг 2: Настройка делителя
Самый главный критерий настройки делителей заключается в жестко закрепленном расположении приспособления перпендикулярно жатке. Делители не должны иметь свободный ход, болтаться вправо или влево. При неправильной настройке масса стеблей будет подаваться на режущий аппарат неравномерно, что приведет к преждевременному выходу из строя режущих узлов. Кроме того, отсутствие оптимизированной подачи массы на шнек жатки (по краям) в условиях уборки культур при высокой влажности ведет к систематически повторяющимся заторам наклонного транспортера.
Шаг 3: Регулировка режущего аппарата
Для настройки данного рабочего элемента необходимо проверить правильность установки сегмента относительно пальца, то есть строго по центру. При этом в обязательном порядке стоит оценить их наличие и состояние, они должны быть комплектными, без сколов, видимых повреждений и завальцованных кромок. Также стоит изучить зазор между сегментом и пальцем. Зазор между режущим аппаратом и пальцами граблин должен находиться в пределах 10-25 мм.
Необходимо отрегулировать с помощью прижимных пластин и регулировочных прокладок зазор между рабочими плоскостями пальцевых вкладышей и сегментов ножа в передней части до 0,8 мм, а в задней — 0,3-1,5 мм.
Правильная регулировка режущего аппарата позволяет исключить дефицит мощности комбайна, снизить расход топлива и на высоком уровне контролировать уровень потерь, который при ошибочной подготовке может составлять до 15 %. Проверить правильность настроек довольного легко: если после прохождения комбайна остаются смятые стебли в строгом, а не хаотичном порядке, то регулировка выполнена с нарушением. Важным фактором является то, что зачастую аграрии списывают такое положение дел на банальный непрокос из-за чрезмерной скорости комбайна или высокую влажность и засоренность поля. На самом деле такая ситуация может возникать, в том числе, из-за неотрегулированного режущего аппарата.
Жатка для зерновых культур комбайна зерноуборочного КЗС-1218. Фото: glavpahar.ru (по материалам zinref.ru)
Шаг 4: Настройка винтового шнека
Шнек играет одну из определяющих ролей для равномерной транспортировки зерновой массы в наклонный транспортер. При неправильной регулировке шнека по высоте и горизонтали (размер от стола до кромки должен составлять не более 1,5 мм) возникают заторы в камере наклонного транспортера. Важно отметить, что регулировка шнека идет в тесной взаимосвязи с наладкой делителя, так как колебания из сторону в сторону также влияют на равномерность подачи.
Кроме того, при слишком большом зазоре между шнеком и столом жатки образуются пучки, которые, дойдя до горловины наклонного транспортера, с обеих сторон адаптера, образуют так называемую пробку.
Горизонтальная регулировка является ключевой базовой настройкой. Если один край имеет зазор больше, чем другой, комбайн изначально будет работать неправильно. Материал будет подаваться неравномерно в наклонный транспортер, под молотильный барабан и на решета, что приведет к растяжению цепи транспортера, нагрузки на подшипник барабана, растяжение клиновидных ремней, неправильному обмолоту на молотилке, нагрузке на двигатель и не правильной работе решетного стана. Заметить проблему можно по необмолоченному колосу и большому количеству потерь.
Стоит помнить, что зазоры между днищем жатки и шнеком, а также между пальцами шнека и днищем устанавливают, согласно рекомендациям, приведенным в руководстве по эксплуатации комбайна, и в процессе уборки не регулируются. Только в случаях забивания хлебной массой пространства под шнеком необходимо увеличить зазор.
Шаг 5: Регулировка пальцев шнека
Пальцы шнека должны иметь следующую регулировку: при прохождении нижней точки перпендикулярно стола жатки зазор максимальный, а на входе наклонного транспортера пальцы должны полностью скрыться в шнеке. Если настройка выполнена неправильно, то наблюдается выброс материала вперед шнека или вверх над жаткой.
Кроме того, при ошибочном подходе будет наблюдаться ворох колоса на наклонном транспортере, стебли с колосьями позади комбайна и дробленое зерно на столе жатки.
Шаг 6: Настройка соломо-отбойной планки
Как следует из опыта механизаторов, данный узел мало кто регулирует. Кроме того, большинство даже не знают, что это такое и где находится. В свою очередь, это важный рабочий элемент жатки. Планка предотвращает выброс шнеком материала вперед, обратно на стол. Механизм предотвращает образование заторов и способствует равномерной подаче в наклонный транспортер. При уборке зерновых пластину устанавливают максимально на 2-3 мм от винтов шнека.
Шаг 7: Настройка наклонного транспортера
Основные регулировки наклонного транспортера сводятся, во-первых, к перпендикулярному положению приводного вала, а, во-вторых, к правильному натяжению цепи, которая должна выдерживать диапазон 2 мм под третьей планкой и ползуном.
ВАЖНО! Всегда проводите регулировку только одной функции. Прежде чем выехать на рабочий участок, сначала проверьте результат регулирования и настроек!
Основные регулировки зерноуборочных комбайнов и технический уход
Выполнив все предыдущие шаги по регулировке самой жатки, механизатор может переходить к настройке и регулировке наклонной камеры, где нужно отрегулировать натяжение цепей транспортера так, чтобы крайние цепи посредине можно было оттянуть вверх усилием руки на 50-70 мм, и молотильного аппарата и очистки, где нужно предварительно отрегулировать молотильный аппарат и очистку комбайна, как для пшеницы и влажности хлебостоя 19-20% (влажное). Дальнейшие регулировки осуществляются непосредственно в поле, в зависимости от состояния хлебов и убираемой культуры.
Для повышения производительности комбайна следует визуально проверить качество убираемой массы, что даст общее представление о том, какие узлы и сборочные единицы комбайна нуждаются в особом внимании. Если в бункере, помимо зерна, присутствует большое количество посторонних примесей, это свидетельствует о чрезмерном обмолоте или некачественной настройке вентилятора.
В качестве регулировки для снижения количества примесей необходимо, прежде всего, увеличить зазор подбарабанья. Если увеличение зазора не даст требуемого результата, необходимо уменьшить частоту вращения барабана. Однако при уменьшении оборотов необходимо иметь в виду, что именно за счет частоты вращения барабана происходит выделение зерна из хлебной массы.
Наличие механических повреждений зерен показывает, что зазор между барабаном и подбарабаньем слишком мал, поэтому необходимо постепенно, увеличивая зазор на 10 мм, исключить повреждение зерна, а затем настроить частоту вращения барабана.
В случае, если приходится убирать зерновые культуры, имеющие повышенную влажность, устанавливают максимальную интенсивность обмолота путем уменьшения зазора и увеличения частоты вращения молотильного аппарата. Бережные условия обмолота нужно соблюдать при уборке культур на семена. Также необходимо в соответствии с руководством по эксплуатации регулировать молотильный аппарат при переходе на уборку других культур.
Регулировка системы очистки зависит не только от правильности настройки решет и вентилятора, но и молотильного аппарата. Прежде всего, необходимо предотвратить попадание в колосовой шнек зерна, после чего нужно исключить попадание зерна в полову и после выполненных процедур добиться чистоты зерна, находящегося в бункере зерноуборочного комбайна.
В случаях, если на систему очистки подается незначительное количество массы, имеет смысл сильнее открыть жалюзи, что позволяет повысить качество очистки путем удаления легких примесей.
При проведении технологического ухода, комбайн стоит осматривать не только перед уборкой, но и во внеуборочное время. В первую очередь, необходимо провести внешний осмотр и определить целостность основных компонентов, составных частей, узлов и уплотнений. В случае наличия грязи нужно очистить рабочие органы от пыли, скоплений половы, соломы и иной растительной массы.
ВАЖНО! Рабочие узлы комбайна лучше тщательно продувать, а не мыть!
С помощью специального оборудования надо срезать солому на рабочих органах (мотовило, шнек) и деталях приводов жатки комбайна (карданный вал, звездочки и так далее). Также следует обратить пристальное внимание на полость камнеуловителя. Здесь следует проверить плотность прилегания щитка к панели фартука и надежно зафиксировать его прижимами.
Вспоминаем основные регулировки зерноуборочных комбайнов к сезону 2020 года
Далее стоит опустить подбарабанье и произвести очистку его поверхности, а затем тщательно осмотреть и стрясти доску и решетный стан, чтобы освободить от залипаний. Следует произвести полное открытие жалюзи решет, убрать принадлежности, запустить молотилку, жатку комбайна и создать максимальный воздушный поток вентилятором очистки. Так стоит поработать в течение 3-5 минут до полного удаления продуктов забивания и залипания.
Если очистка прошла успешно, надо восстановить регулировочные параметры в молотильном аппарате, решетном стане и вентиляторе очистки, после чего закрыть все смотровые люки.
«ГлавПахарь» акцентирует внимание на том, что самое главное при эксплуатации любого оборудования или механизма — это соблюдение регламента технического обслуживания, которое минимизирует износ и поломки агрегата.
При эксплуатации жаток надо проводить ежесменное обслуживание привода ножа или цепи привода шнека, а также контроль натяжения цепи привода шнека, смазку подшипников мотовила (примерно через каждые 50 моточасов), смазку цилиндров выдвижного стола (при наличии), замену масла в приводе ножа и в редукторе, контроль натяжения ремня привода режущего аппарата, а также своевременно менять изношенные элементы.
Весь перечень конкретных рекомендаций и правил по каждому отдельному агрегату указан в нормативной документации, технических условиях и руководству по эксплуатации.
После окончания сезонных работ прицепную технику и адаптеры рационально хранить в крытом охраняемом помещении, которое не отапливается или находится под навесом на улице.
Как хранить сельхозтехнику зимой: основные рекомендации
Место для хранения жатки должно быть выбрано с учетом удобства и эргономичности ее дальнейшего обслуживания. При размещении комбайна на улице, его стоит покрыть защитным слоем химии.
Не реже одного раза в тридцать дней необходимо проверять надежность герметизации сборочных единиц, а также коррозийные свойства неокрашенной поверхности, покрытой консервационной смазкой. Работоспособность техники стоит проверять через 60 дней после окончания работ, если же техника хранится под навесом — каждые 30 дней.
Центрально-Черноземная МИС испытала три жатки производства Ростсельмаш
Как правильно выбрать жатку?
В настоящее время рынок зерноуборочных адаптеров, как и самих комбайнов, чрезвычайно насыщен. Жатки производят как сами производители сельхозтехники, так и отдельные предприятия, специализирующиеся на данном типе продукции.
Делать обзор для фермеров практически бессмысленно из-за бесчисленного количества предложений в сегменте. Как говорится «каждому свое или выбирай не хочу». Но при этом есть базовые рекомендации, которые призваны помочь аграриям сделать правильный выбор, основанный на возможностях и потребностях.
Основным шагом является определение адаптивности оборудования к виду комбайна и потребности в той или иной рабочей ширине захвата с последующей оценкой эффективности и функциональности.
К примеру, если у хозяйства большие широкие и ровные поля, ему все равно стоит купить широкозахватный адаптер, несмотря на то, что он стоит значительно дороже. В данном случае широкозахватная жатка не только обеспечит высокий уровень производительности, но и позволит организовать удобную логистику, что в обязательном порядке окупится в течение нескольких лет. При этом широкие жатки также позволят снизить уплотнение почвы и количество пропусков.
В период активного развития отрасли цифровизации, такое решение также позволит увеличить выработку комбайна, а в комплексе с многофункциональной системой автоматизированного управления еще и сделает загрузку уборочной машины более равномерной и оптимизированной.
Проблема выбора правильной рабочей ширины захвата, несмотря на ее кажущуюся банальность, является достаточно распространенной. Аграрии часто «промахиваются» в сторону занижения, в результате чего комбайны часто недозагружены.
Стоит помнить, что для подбора оптимальной по ширине захвата жатки рекомендуется соотнести параметры мощности самоходной техники с подлежащими уборке площадями и рассчитать примерную выработку за один уборочный день и за час работы. Также стоит не забывать о конфигурации самих полей, особенностях рельефа и возможных препятствиях.
При всех преимуществах широкозахватных жаток, о которых мы говорили выше, их не стоит покупать, если комбайн не оборудован системами точного земледелия, так как механизатор физически не сможет охватить глазом ее края, а это обязательно приведет к появлению пропусков и перехлестов.
Жатка 9350 DynaFlex от AGCO получила престижную премию
Таким образом, грамотная и профессиональная настройка и регулировка жаток зерноуборочных комбайнов позволяет повысить качество уборочных работ и снизить потери зерна. Но важно понимать, что общая эффективность зависит от целого комплекса шагов и факторов, начиная от технического состояния самого комбайна и заканчивая квалификацией и дисциплинированностью комбайнера.
ВАЖНО! Эффективная уборка достигается за счет профессиональной работы на всех этапах и во всех узлах.
#5e4e3f5cf62ea27578a8faed #5f40c7be7e33911a71196933 #5f283be6d7999735feefbffc #5e5cc4859c2e7259fd65056c #5e5e6fc49c2e7259fd650637 #5ec4eabc0cdbb00c35cb455d #5e4d49fe5335011c8b766876 #5e4e3f71f62ea27578a8faef #5ee76dddc65cfa5c7ae8b713