Из формулы (65) следует, что частота вращения якоря электродвигателя постоянного тока зависит от падения напряжения Iя?Rя в цепи обмотки якоря, питающего напряжения U и магнитного потока Ф. Поэтому ее можно регулировать тремя способами:
включением реостата с сопротивлением Rп в цепь обмотки якоря;
изменением питающего напряжения U;
изменением магнитного потока Ф.
Рассмотрим более подробно эти способы на примере двигателей с последовательным и параллельным возбуждением.
Включение реостата в цепь обмотки якоря. При включении реостата с сопротивлением Rп в цепь обмотки якоря, кроме естественной механической характеристики 1, получают и ряд реостатных характеристик 2, 3 и 4 (рис. 133). При этом заданному нагрузочному моменту Мвн соответствуют различные значения частоты вращения n1, n2, n3 и n4; чем больше сопротивление Rп тем меньше частота вращения якоря двигателя. Такой способ регулирования весьма прост и позволяет осуществлять плавное регулирование частоты вращения в широком диапазоне. (Однако при этом возникают большие потери энергии в регулирующем реостате, вследствие чего его практически применяют только при кратковременных режимах работы двигателя (например, при пуске). Другим недостатком рассматриваемого способа регулирования является то, что частоту вращения п можно только уменьшать от n1 до нуля.
Изменение питающего напряжения. При изменении питающего напряжения частота вращения п изменяется пропорционально U. Следовательно, подавая на обмотку якоря различные напряжения U1, U2, U3, можно получить семейство механических характе-
 Рис. 133. Механические характеристики электродвигателей с последовательным (а) и независимым или параллельным (б) возбуждением при регулировании частоты вращения включением реостата в цепь обмотки якоря
Рис. 133. Механические характеристики электродвигателей с последовательным (а) и независимым или параллельным (б) возбуждением при регулировании частоты вращения включением реостата в цепь обмотки якоря
 Рис. 134. Механические характеристики электродвигателя с последовательным (а) и независимым (б) возбуждением при регулировании частоты вращения путем изменения питающего напряжения
Рис. 134. Механические характеристики электродвигателя с последовательным (а) и независимым (б) возбуждением при регулировании частоты вращения путем изменения питающего напряжения
 Рис. 135. Схемы питания электродвигателя с последовательным возбуждением от генератора (а) и выпрямителя (б)
Рис. 135. Схемы питания электродвигателя с последовательным возбуждением от генератора (а) и выпрямителя (б)
ристик 1, 2 и 3, у которых при любой нагрузке n1:n2:n3 = U1:U2:U3 (рис. 134). При уменьшении питающего напряжения механические характеристики двигателя смещаются в область меньших частот вращения и располагаются параллельно. Для осуществления указанного способа регулирования частоты вращения двигатель должен быть подключен к источнику постоянного тока с регулируемым напряжением: к генератору Т с независимым возбуждением (рис. 135, а) или выпрямителю Вn (рис. 135,б). Питание тяговых двигателей от генератора осуществляется на тепловозах, а от выпрямителя — на электровозах и электропоездах переменного тока. На электровозах и электропоездах выпрямитель подключают к трансформатору, позволяющему изменять напряжение, подаваемое на вход выпрямителя, а следовательно, и его выходное напряжение U. На тепловозах в цепях управления имеется специальная электрическая аппаратура, позволяющая изменять ток возбуждения генератора, т. е. его выходное напряжение U, ручным способом или автоматически.
Несмотря на то, что рассмотренный способ требует довольно сложного оборудования, его широко применяют на современных локомотивах и электропоездах, так как он обеспечивает плавное и экономичное (без потерь энергии в реостатах) регулирование частоты вращения в очень широких пределах. Следует отметить, что для электродвигателей с параллельным возбуждением указанный способ регулирования применять нельзя, так как при уменьшении питающего напряжения соответственно уменьшался бы магнитный поток двигателя и увеличивался ток обмотки якоря. В этом случае двигатель должен быть переведен на независимое возбуждение.
На э. п. с. постоянного тока напряжение, подводимое от контактной сети к электровозу или моторному вагону, не может регулироваться, поэтому здесь для изменения подаваемого к двигателям напряжения применяют последовательно-параллельное переключение тяговых двигателей. При этом изменяется напряжение, приходящееся на каждый двигатель локомотива, и частота вращения.
При регулировании частоты вращения двигателей путем их последовательно-параллельного переключения число возможных схем соединений зависит от числа двигателей, установленных на данном локомотиве. Например, на четырехосных электровозах может быть использовано последовательное соединение тяговых двигателей (рис. 136, а); при этом напряжение, подводимое к двигателю, в 4 раза меньше напряжения U в контактной сети и двигатель имеет некоторую минимальную частоту вращения nmin при заданном моменте Мвн. При соединении двигателей в две параллельные группы (рис. 136, б), в каждую из которых включено по два последовательно соединенных двигателя, напряжение, подводимое к каждому двигателю, будет в 2 раза меньше напряжения U в контактной сети и частота его вращения будет составлять 2nmin. Характеристики двигателей при этом располагаются одна над другой (рис. 136, в).
Последовательно-параллельное переключение тяговых двигателей применяют также на тепловозах. Это позволяет ограничить диапазон регулирования напряжения генератора, от которого зависят его габаритные размеры и масса.
Изменение магнитного потока. Для того чтобы изменить магнитный поток Ф, регулируют ток возбуждения двигателя с помощью
 Рис. 136. Схемы соединения тяговых двигателей на четырехосных электровозах или электропоездах (а и б) и механические характеристики двигателей при различных схемах соединения (в): 1 — последовательное соединение; 2— последовательно-параллельное соединение
Рис. 136. Схемы соединения тяговых двигателей на четырехосных электровозах или электропоездах (а и б) и механические характеристики двигателей при различных схемах соединения (в): 1 — последовательное соединение; 2— последовательно-параллельное соединение
 Рис. 137. Схема включения регулировочного реостата параллельно обмотке возбуждения в двигателе с последовательным возбуждением (а) и механические характеристики (б) при различных сопротивлениях реостата
Рис. 137. Схема включения регулировочного реостата параллельно обмотке возбуждения в двигателе с последовательным возбуждением (а) и механические характеристики (б) при различных сопротивлениях реостата
регулировочного реостата Rрв (рис. 137, а). В двигателях с после-довательньм возбуждением регулировочный реостат включают параллельно обмотке возбуждения, вследствие чего через обмотку возбуждения будет протекать только часть тока якоря (другая часть ответвляется в точке О в реостат Rрв). Обычно регулировочный реостат имеет несколько ступеней с сопротивлениями R1, R2, R3, которые позволяют получать несколько ступеней регулирования тока возбуждения двигателя.
Включение ступеней R1, R2, R3 осуществляется контакторами 1, 2 и 3; при этом механические характеристики двигателя 2 (при включении ступени R1), 3 (при включении R1 и R2 и 4 (при включении R1, R2 и R3) располагаются выше естественной характеристики 1 (рис. 137,б).
Степень регулирования тока возбуждения характеризуется коэффициентом регулирования возбуждения ?, который представляет собой отношение тока возбуждения Iв0 при ослабленном возбуждении (включен регулировочный реостат Rрв) к току возбуждения Iвн при нормальном возбуждении при одном и том же токе в обмотке якоря:
? = Iв0/Iвн = Rвн/(Rв+Rвн)
где Rв — сопротивление обмотки возбуждения.
Рассмотренный способ регулирования прост и экономичен, поэтому его широко применяют на локомотивах и электропоездах. Однако в этом случае регулирование частоты вращения можно осуществлять только в сравнительно небольшом диапазоне. Нижний предел nmin ограничивается насыщением магнитной цепи машины, которое не позволяет увеличивать в значительной степени магнитный поток, верхний предел nmax—условиями устойчивости (при сильном уменьшении Ф двигатель идет вразнос), а также тем, что при глубоком ослаблении возбуждения сильно увеличивается ток якоря Iя, что приводит к возрастанию реактивной э. д. с. и искажающего действия реакции якоря. При этом повышается опасность возникновения искрения на коллекторе и появления кругового огня. По этой причине двигатели, предназначенные для работы в режимах глубокого ослабления возбуждения, обязательно должны иметь компенсационную обмотку и пониженное значение реактивной э. д. с. при номинальном режиме. Обычно предельное значение коэффициента возбуждения ? для двигателей без компенсационной обмотки составляет 0,3—0,33, а при наличии компенсационной обмотки — 0,2.
В двигателях с независимым и параллельным возбуждением регулировочный реостат, посредством которого изменяют ток возбуждения Iв и магнитный поток Ф, включают последовательно с обмоткой возбуждения (см. рис. 125). В этом случае при изменении тока возбуждения частота вращения n0 при холостом ходе будет изменяться, т. е. механическая характеристика 2 при ослабленном возбуждении будет располагаться выше характеристики 1 при нормальном возбуждении (рис. 138). Однако характеристики 1 и 2 при различных значениях Ф не будут параллельны, так как согласно формуле (65) изменяется снижение частоты вращения, обусловленное падением напряжения Iя?Rя в цепи обмотки якоря.
Работа электродвигателя с ослабленным возбуждением при переходных процессах. При включении регулировочного реостата параллельно обмотке возбуждения (см. рис. 137, а) приходится применять специальные меры для сохранения требуемого распределения тока между нею и реостатом при переходных процессах, возникающих в случаях резкого изменения режима работы двигателя, изменения напряжения в контактной сети и пр.
При переходных процессах, когда токи Iя, Iв и Iрв изменяются, в обмотке возбуждения возникает значительная э. д. с. самоиндукции еL. В результате ее действия ток Iв уменьшается по сравнению с его значением при стационарном режиме, а ток Iрв возрастает, т. е. происходит значительно большее ослабление возбуждения. Наиболее опасным переходным процессом для тяговых двигателей, работающих с ослабленным возбуждением, является включение их на полное напряжение после кратковременного отключения от
 Рис. 138. Механические характеристики электродвигателя с независимым и параллельным возбуждением при регулировании частоты вращения путем изменения магнитного потока
Рис. 138. Механические характеристики электродвигателя с независимым и параллельным возбуждением при регулировании частоты вращения путем изменения магнитного потока
Рис. 139. Направление электромагнитного момента М при различном направлении тока в обмотке якоря и различной полярности полюсов
 Рис. 140. Схемы переключений обмотки электродвигателя с последовательным возбуждением при изменении направления вращения
Рис. 140. Схемы переключений обмотки электродвигателя с последовательным возбуждением при изменении направления вращения
сети (при отрыве токоприемника от контактного провода). В этом случае из-за большой э. д. с. самоиндукции еL в первый момент после включения почти весь ток Iя пойдет по регулировочному реостату Rрв, а ток Iв в обмотке возбуждения будет мал. Это приведет к значительному возрастанию тока Iя в обмотке якоря из-за уменьшения э. д. с. Е, индуцированной в ней. Практически при этих условиях возникает резкий бросок тока Iя, сопровождающийся нарушением нормальной коммутации (искрением под щетками) и образованием кругового огня. Кроме того, из-за большой скорости изменения тока создаются большие коммутационные перенапряжения, которые могут вызвать пробой изоляции обмоток якоря и возбуждения.
Бросок тока Iя при включении двигателя под напряжение и скорость его изменения зависят от распределения токов Iв и Iрв между обмоткой возбуждения и регулировочным реостатом Rрв. Чтобы обеспечить при переходных процессах такое же распределение токов Iв и Iрв, как и при стационарном режиме, последовательно с реостатом Rрв включают индуктивный шунт ИШ, представляющий собой катушку с ферромагнитным сердечником. Индуктивность этой катушки подбирают так, чтобы отношение индуктивностей обмотки возбуждения и цепи реостата Rрв было приблизительно равно отношению их сопротивлений. При этом условии возникающие при переходных процессах э. д. с. самоиндукции eL в обмотке возбуждения и eL1 в индуктивном шунте не будут влиять на распределение токов Iв и Iрв и возрастание тока Iя будет небольшим.
Изменение направления вращения. Чтобы изменить направление вращения двигателя, необходимо изменить направление электромагнитного момента М, действующего на якорь. Направление момента М определяется правилом левой руки (см. рис. 68,б). Изменить направление М можно двумя способами (рис. 139, а — в): 1) изменением направления тока Iя в обмотке якоря; 2) изменением полярности полюсов, т. е. направления магнитного потока Ф, путем изменения направления тока возбуждения Iв. Для этого переключают провода, подводящие ток к обмотке якоря или к обмотке возбуждения. Например, если при вращении электродвигателя в направлении Вперед ток Iя проходил от щетки А к щетке Б (рис. 140, а), а ток возбуждения Iв — от зажима В1 к зажиму В2, то для перевода двигателя в направление Назад необходимо переключить цепь обмотки якоря так, чтобы ток Iя проходил от щетки Б к щетке А, оставив неизменным направление тока Iв (рис. 140,б), или, оставив неизменным направление тока Iя от А к Б, переключить цепь возбуждения так, чтобы ток Iв проходил от зажима В2 к зажиму В1 (рис. 140, в).
3.6.1. Регулирование частоты вращения двигателей с параллельным, независимым и смешанным возбуждением
Основным
преимуществом двигателей постоянного
тока является сравнительная простота
регулирования частоты вращения якоря
в больших пределах. Основными способами
регулирования частоты вращения якоря
двигателей являются:
-
якорное регулирование,
-
полюсное
регулирование, -
реостатное
регулирование.
Сущность
каждого способа регулирования частоты
вращения можно понять, анализируя
уравнение, определяющее связь между
частотой вращения, напряжением питания,
сопротивлением регулировочного реостата
и током возбуждения. Ток возбуждения
определяет магнитный поток машины.
Уравнение
электрического равновесия двигателя,
последовательно с якорем которого
включен регулировочный реостат
сопротивлением Rр:
![]()
или
![]()
.
Отсюда
![]()
.
Регулировочное
сопротивление включается последовательно
с якорем, подобно пусковому реостату.
Оно работает в длительном режиме, поэтому
его номинальная мощность определяется
максимальной рассеиваемой мощностью
при самых неблагоприятных условиях.
Из
формулы следует, что частота вращения
пропорциональна приложенному напряжению
и обратно пропорциональна магнитному
потоку
.
Рассмотрим каждый
способ управления двигателем.
Якорное управление
Под
якорным управлением понимают регулирование
скорости вращения якоря двигателей
постоянного тока путем изменения
напряжения на зажимах якоря двигателя.
Напряжение на зажимах обмотки возбуждения
должно оставаться неизменным. При таком
способе управления двигателем
регулировочное сопротивление не
используют, и сопротивление цепи якоря
определяется только сопротивлением
обмотки якоря Rя
. Тогда
![]()
.
При
неизменной величине магнитного потока
и сопротивления цепи якоря
![]()
,
но при различных значениях напряжения
питания двигатель будет иметь различные
искусственные механические характеристики,
проходящие через точку частоты вращения
идеального холостого хода, величина
которой определяется из уравнения
![]()
и
находится на оси частот вращения n.
Другая точка механической
характеристики определяется величиной
пускового момента
![]()
.
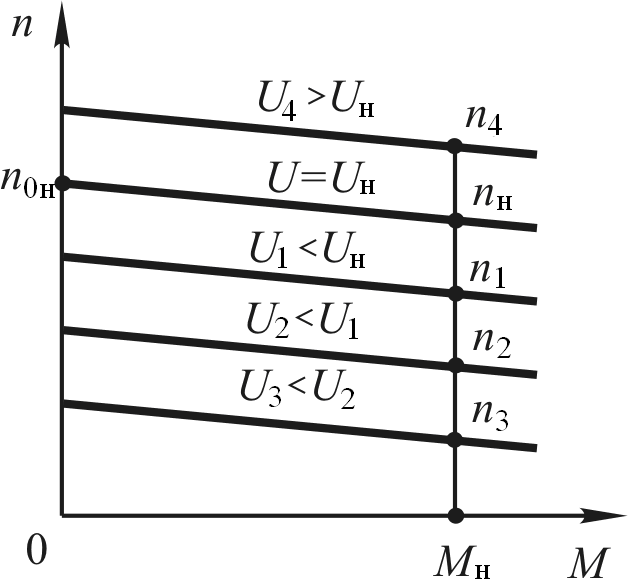
Рис. 3.21
Очевидно то, что и
![]()
и
![]()
пропорциональны напряжению питания
якоря U
и механические характеристики при
различных напряжениях сети U
параллельны друг другу.
Семейство таких характеристик представлено
на рис. 3.21.
Если
двигатель нагружен номинальным моментом
Мн,
то каждому напряжению соответствует
своя частота вращения, пропорциональная
приложенному напряжению U.
Номинальному напряжению Uн
соответствует
номинальная частота вращения nн.
Напряжение меньше номинального
![]()
обеспечивает
меньшую частоту вращения
![]()
.
Аналогично изменяется частота вращения
при увеличении напряжения
![]()
и
![]()
.
Падение
напряжения на сопротивлении якоря при
неизменном моменте остается постоянным.
Увеличение напряжений до значений,
больших номинального, нежелательно,
так как частота вращения при этом
становится больше номинальной величины,
а это может привести к преждевременному
износу машины. На практике иногда
допускается увеличение напряжения на
якоре на 15–20 % выше номинального
напряжения.
Полюсное управление
Под
полюсным управлением двигателя
постоянного тока понимают регулирование
частоты вращения якоря путем изменения
напряжения на зажимах обмотки возбуждения.
При полюсном управлении двигателем при
постоянном моменте на валу ток якоря и
напряжение на якоре остаются неизменными.
Регулируют лишь ток возбуждения,
изменение которого приводит к изменению
магнитного потока. Из уравнения скорости
![]()
очевидно
то, что числитель дроби остается величиной
постоянной и частота вращения обратно
пропорциональна магнитному потоку.

Рис.
3.22
Рассмотрим семейство
механических характеристик двигателя,
соответствующих различным значениям
тока возбуждения, предполагая, что
магнитная цепь машины не насыщена и
магнитный поток прямо пропорционален
току возбуждения. Как и прежде, построение
механических характеристик будем вести,
определяя частоту вращения идеального
холостого хода n0
и величину пускового момента Mп.
На рис. 3.22 изображено семейство полных
механических характеристик, соответствующих
различным значениям тока возбуждения.
Естественная
механическая характеристика представляет
собой прямую линию, проходящую через
точки
![]()
и
![]()
.
При
уменьшении тока возбуждения на 20 %
частота вращения идеального
холостого хода
увеличивается. Пусковой момент
![]()
при этом уменьшается на 20 % (см. рис.
3.22). При увеличении тока возбуждения на
20 % происходит уменьшение частоты
вращения идеального холостого хода
.
Пусковой
момент при этом увеличится в такое же
число раз.
Механические
характеристики двигателя постоянного
тока
с изменением механических
моментов нагрузки в пределах от
![]()
до
![]()
представлены на рис. 3.23.
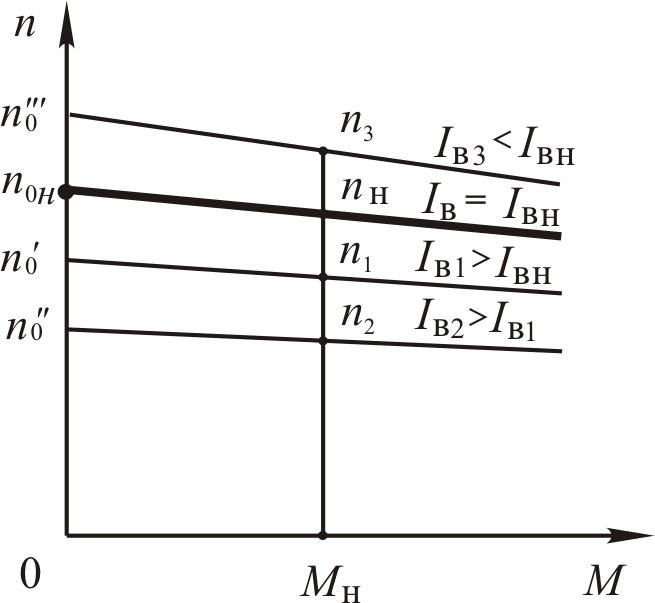
Рис.
3.23
При
изменении тока возбуждения угол наклона
механических характеристик изменяется.
При этом уменьшение тока возбуждения
приводит к увеличению частоты вращения,
а увеличение тока возбуждения дает
уменьшение частоты вращения двигателя.
Диаметр провода обмотки возбуждения
выбирается из условия прохождения
номинального тока, поэтому значительное
увеличение тока возбуждения до
значений выше номинального приводит к
перегреву обмотки возбуждения. Иногда
допускают превышение тока возбуждения
на 1520 %.
Из
уравнения механической характеристики
следует то, что частота вращения
идеального холостого хода обратно
пропорциональна магнитному потоку
.
Если
предположить,
что магнитный поток машины пропорционален
току возбуждения, то
![]()
,
где k
– коэффициент пропорциональности,
тогда
![]()
.
Теоретически
уменьшение тока возбуждения в два раза
дает двукратное увеличение частоты
вращения, что уже недопустимо.
Дальнейшее
уменьшение тока возбуждения приводит
к аварийной ситуации и к выходу двигателя
из строя. Поэтому системы защиты двигателя
контролируют величину тока возбуждения
и отключают напряжение питания якоря
при опасно малых токах возбуждения.
Таким образом, возможности полюсного
управления двигателей постоянного тока
весьма ограничены.
Реостатное
регулирование
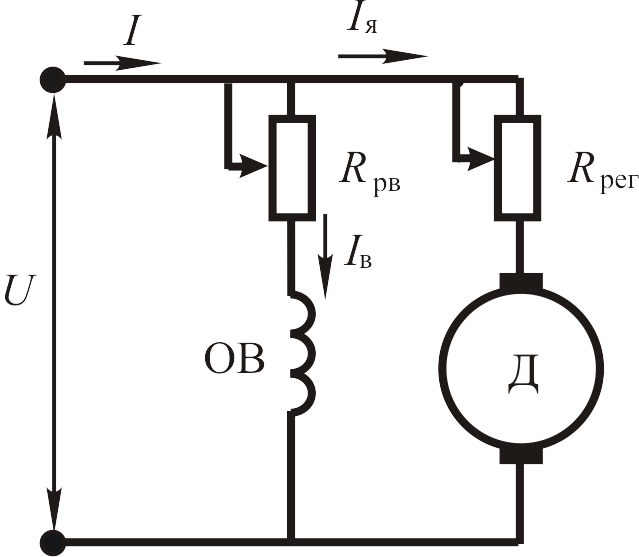
Рис. 3.24
Под реостатным
управлением двигателя постоянного тока
понимают изменение скорости вращения
двигателя путем изменения сопротивления
цепи якоря. Для такого регулирования
последовательно с якорем включают
реостат
![]()
(рис. 3. 2 4). Изменение частоты вращения
двигателя постоянного тока с помощью
регулировочного реостата возможно в
том случае, когда двигатель нагружен
механическим моментом, близким к
номинальной величине. Принцип регулирования
основан на том, что при изменении
сопротивления цепи якоря изменяется
угол наклона механической характеристики
двигателя к оси моментов и при постоянном
механическом моменте сопротивления на
валу частота вращения изменяется. Схема
включения двигателя изображена на рис.
3.24.
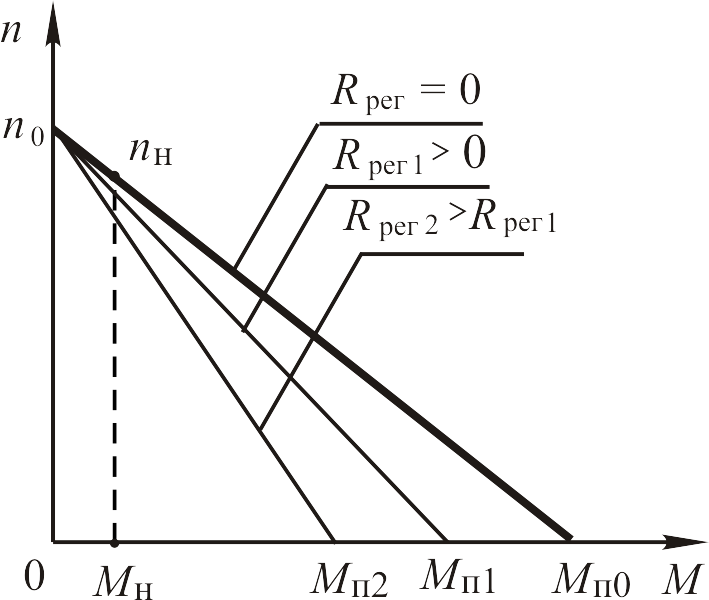
Рис.
3.25
Рассмотрим полные
механические характеристики при
различных сопротивлениях регулировочного
реостата. Семейство полных
механических характеристик
двигателя при различных величинах
сопротивлений регулировочного реостата
Rрег
показано на рис. 3.25.
Ранее получена формула, описывающая
механическую характеристику двигателя
при включенном последовательно
с якорем регулировочном реостате
![]()
.
Положение
механической характеристики определяется
двумя точками: скоростью идеального
холостого хода
![]()
и пусковым
моментом
![]()
.
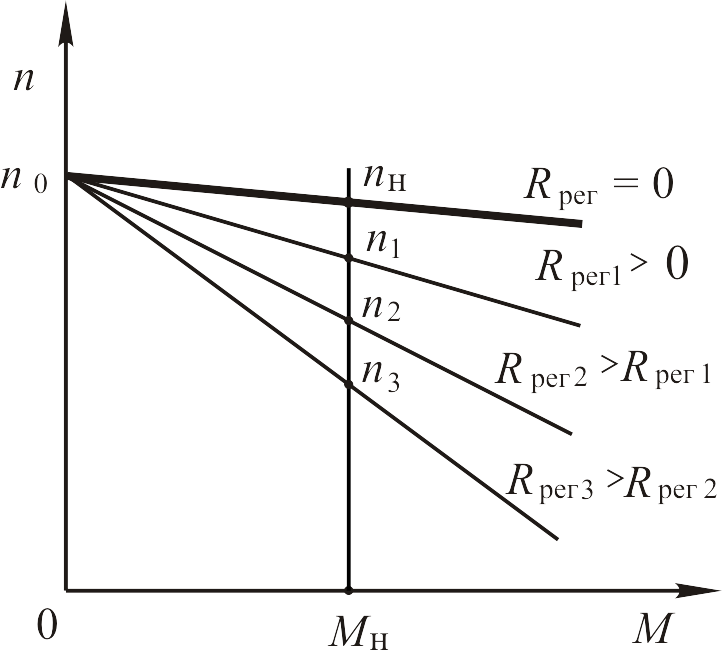
Рис. 3.26
Из приведенных
формул следует, что скорость идеального
холостого хода не зависит от сопротивления
регулировочного реостата. Величина же
пускового момента обратно пропорциональна
этому сопротивлению. Поэтому угол
наклона характеристик при увеличении
сопротивления регулировочного реостата
увеличивается
![]()
.
Механические характеристики двигателя
для значений моментов от 0 до 1,5Мн
и при различных величинах сопротивлений
регулировочного реостата Rрег
показаны на рис. 3.26.
При
неизменном механическом моменте ток
якоря является величиной постоянной,
и вторая слагаемая уравнения скорости
![]()
,
имея отрицательный знак, увеличивается
при увеличении Rрег .
Таким образом, увеличение Rрег
приводит
к уменьшению частоты вращения
двигателя. На рис. 3.26
![]()
.
При
таком способе регулирования частоты
вращения при постоянном моменте на валу
мощность, потребляемая из сети, остается
неизменной
![]()
.
Выходная же мощность двигателя при
уменьшении частоты вращения уменьшается,
так как
![]()
.
Мощность потерь
![]()
,
равная разности мощности, потребляемой
из сети, и выходной мощности,
с уменьшением
частоты вращения увеличивается за счет
увеличения мощности нагревания
регулировочного реостата, так как потери
в самом двигателе изменяются незначительно.
КПД всей установки при таком способе
регулирования частоты вращения гораздо
меньше номинального значения. С точки
зрения энергетических затрат такой
способ регулирования частоты вращения
неэффективен.
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
§ 82. Способы регулирования частоты вращения якорей тяговых двигателей постоянного тока и реостатный пуск
Способы регулирования частоты вращения. Частоту вращения якорей тяговых двигателей можно регулировать, изменяя напряжение £/д на зажимах двигателя или магнитный поток Ф, т. е. коэффициент возбуждения 6. Напряжение С/д изменяют с помощью пускового реостата, включенного последовательно с двигателями, и тиристорных преобразователей, а также применением различных схем соединений тяговых двигателей.
Реостатный пуск. В момент пуска и разгона электровоза или моторного вагона электропоезда для увеличения напряжения на зажимах двигателя и поддержания необходимых тока и силы тяги выводят ступенями пусковой реостат, т. е. осуществляют реостатный пуск. Для длительной езды под током применяют различные соединения тяговых двигателей и ступени ослабления возбуждения. Скоростные характеристики v(I), соответствующие различным схемам соединения двигателей при выведенном пусковом реостате и коэффициентам возбуждения, называют экономическими (ходовыми); характеристики, соответствующие работе на различных ступенях реостатного пуска, — реостатными.
В период пуска и разгона поезда якоря тяговых двигателей должны развивать частоту вращения от нуля до значения, соответствующего выходу на безреостатную характеристику. На электровозах, где пусковой режим машинист изменяет в широкик пределах сообразно с весом поезда, профилем пути и условиями сцепления, чаше всего применяют неавтоматический ступенчатый реостатный пуск. Плавное изменение сопро-
тивления пускового реостата, рассчитанного на большой ток, принципиально возможно при импульсном регулировании его тиристорным преобразователем.
В процессе пуска почти всегда реализуется максимальная по сцеплению сила тяги. Отклонение пускового тока /„ и силы тяги от средних значений при ступенчатом реостатном пуске характеризуют соответственно коэффициентами неравномерности пуска по току и силе тяги кл[ и киР.
Чтобы пуск электровоза или электропоезда происходил без боксования, для любой позиции должно быть соблюдено уСЛОВИе / тах/Я < фк (ЗДесЬ ^тах —
максимальная сила тяги по условиям сцепления движущего колеса с рельсом; Я — нагрузка иа рельсы от колесной пары; фк — расчетный коэффициент сцепления, который выбирают согласно Правилам тяговых расчетов. Максимальная возможная по условиям сцепления сила тяги тем больше, чем меньше коэффициент неравномерности.
При различных пределах отклонения тока для разных позиций коэффициенты ки1 и к„р являются переменными и определяются отдельно. В случае уменьшения к„/ снижается вероятность нарушения сцепления, поскольку сила тяги нарастает более мелкими ступенями. Для электровозов принимают кн) не более 0,07 — 0,08, что соответствует при пуске колебаниям тока ±9—10%. На некоторых современных электровозах колебания пускового тока составляют ±4%. Для моторных вагонов электропоездов коэффициент к„/ выбирают в зависимости от ускорения а, полагая ас кн/ ж 0,075 -4—4- 0,085 м/с2.
Коэффициент к„/> обычно в 1,2—1,25 раза больше коэффициента кн1. Полученное значение /’тах для электровозов проверяют также по перегрузочной способности двигателя. Наибольшее значение
тока при пуске не должно превышать ^3*= кпЛ (здесь кпэ = 1,4 1,6 — коэффициент эксплуатационной перегрузки для электровозов с неавтоматическим пуском).
С уменьшением числа ступеней упрощается аппаратура, но вместе с тем увеличиваются колебания тока при переходе с позиции на позицию, а это приводит к уменьшению использования сцепного веса при пуске и торможении и резким толчкам тягового усилия. Поэтому в каждом конкретном случае стремятся принять решение, удовлетворяющее в необходимой степени обоим требованиям. Каждому соединению двигателей соответствует несколько кривых, характеризующих зависимость скорости движения v от тока / при различных сопротивлениях г. Совокупность таких кривых с указанием перехода с одной кривой (характеристики) на другую при максимальном токе называют пусковой диаграммой.
Для ограничения начального ускорения во время пуска электровоза с низкими скоростями при маневрах, а также для плавного натяжения упряжных приборов при трогании локомотива с составом на первом соединении тяговых двигателей, кроме позиций, полученных из условий пуска с расчетными пределами тока, вводят еще маневровые позиции, при которых пусковое сопротивление больше сопротивления, соответствующего первой пусковой позиции. Число маневровых позиций для электровозов обычно выбирают от четырех до шести.
Первую маневровую позицию рассчитывают по начальному ускорению, равному 0,3—0,5 м/с2 при пуске электровоза без состава на площадке. Для электропоездов с ускорением 0,7—1,0 м/с2 при автоматическом пуске обычно предусматривают одну маневровую позицию, сопротивление которой рассчитывают исходя из начального ускорения 0,5—0,6 м/с2 при v = 0.
При малом пусковом токе переход на первую позицию второго соединения тяговых двигателей может сопровождаться значительным броском тока, для уменьшения которого на втором и последующих соединениях двигателей при ручном пуске добавляют две или три дополнительные реостатные позиции на электро-
возах и одну или две на моторных вагонах аналогично маневровым позициям на первом соединении
Для определения дополнительных ступеней, предшествующих первой позиции второго соединения двигателей, находят скорость, при которой бросок тока при переходе с предыдущей автоматической характеристики на первую реостатную следующего соединения был бы равен разности максимального и минимального пусковых токов.
⇐Предыдущая Оглавление Следующая⇒
Регулирование частоты вращения. Частоту вращения электродвигателей постоянного тока регулируют: введением резисторов в цепь якоря двигателя; изменением магнитного потока; изменением напряжения, приложенного к якорю электродвигателя.
В зависимости от способа регулирования частоты вращения получаются различные искусственные механические характеристики.
При введении резисторов в цепь якоря у двигателей с независимым и параллельным возбуждением магнитный поток не изменяется, следовательно, остается постоянной частота вращения идеального холостого хода nx, но значение сопротивления вводимого резистора оказывает большое влияние на наклон механической характеристики, так как возрастает угловой коэффициент:
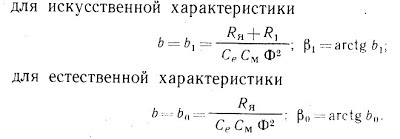
Поэтому искусственная механическая характеристика двигателей с независимым и параллельным возбуждением представляет собой прямую линию 1 (рис. 2.3), проходящую через одну точку nx с естественной характеристикой 0 и наклоном β1, определяемым значением сопротивления вводимого резистора.

Рис. 2.3. Механические характеристики электродвигателя с параллельным возбуждением
Изменение сопротивления цепи якоря для двигателя с последовательным возбуждением приведет к смещению характеристики вниз в сторону уменьшения n.
Магнитный поток электродвигателей можно изменить введением дополнительного резистора в цепь обмотки возбуждения, причем уменьшаются ток возбуждения и магнитный поток двигателя.
Изменение магнитного потока приводит к увеличению частоты вращения идеального холостого хода и изменению наклона механической характеристики у двигателей с независимым, параллельным и смешанным возбуждением.
Действительно, если Ф = Ф0, то для естественной характеристики
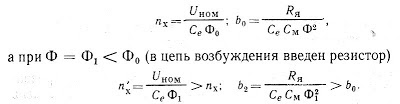
Таким образом, искусственная механическая характеристика, полученная при введении резистора в цепь обмотки возбуждения двигателя, располагается выше естественной (характеристика 2), частота вращения идеального холостого хода и наклон характеристики увеличиваются.
Изменение питающего цепь якоря напряжения при неизменном напряжении в цепи независимой обмотки возбуждения приводит у двигателей с независимым возбуждением к изменению частоты вращения идеального холостого хода при неизменном наклоне характеристики.

Следовательно, искусственная характеристика расположится ниже естественной и будет параллельна ей (характеристика 3). У двигателя, имеющего смешанное возбуждение, искусственная характеристика также будет ниже естественной.
Анализируя полученные механические характеристики электродвигателей постоянного тока, можно установить, что при одном и том же моменте на валу электродвигателя частота вращения его на разных характеристиках будет различной. Поэтому частоту вращения электродвигателей регулируют способами, используемыми для получения искусственных характеристик. Различают параметрическое и импульсное регулирование.
При параметрическом способе изменяется какой-либо параметр, который далее остается неизменным. Импульсное регулирование характеризуется периодическим ступенчатым изменением какого-либо параметра с определенной частотой.
Каждому из параметрических способов присущи свои особенности, определившие область их применения.
Введение резистора в цепь якоря приводит к уменьшению частоты вращения, причем эффективность регулирования тем больше, чем больше нагружен двигатель. Способ не экономичен из-за больших потерь энергии в дополнительном резисторе, но все же используется вследствие его простоты.
Введение резистора в цепь обмотки возбуждения приводит к увеличению частоты вращения. Этот способ экономичен, так как ток возбуждения составляет 2—5 % тока якоря и потери в резисторе невелики. Однако этот способ не позволяет получить частоту вращения двигателя меньше номинальной.
Изменение приложенного к якорю напряжения — наиболее удачный способ регулирования. Он экономичен и допускает регулирование частоты вращения в достаточно широких пределах при любых значениях нагрузки, но требует автономных источников питания с широким диапазоном изменения напряжения. Поэтому его целесообразно применять для электроприводов с частыми пусками и большим диапазоном регулирования частоты вращения электродвигателя (рулевые электроприводы, электроприводы оперативных лебедок земснарядов, гребные электрические установки и т.п.). Автономным источником питания может служить генератор постоянного тока с независимым возбуждением. Напряжение можно регулировать с помощью управляемого выпрямителя или магнитного усилителя.
Из импульсных способов регулирования двигателей постоянного тока наиболее широкое распространение получил способ изменения времени включения приложенного к якорю напряжения при постоянной частоте включения. Этот способ называется широтно-импульсным. Среднее значение приложенного к якорю напряжения

Изменяя tp при постоянном Т (изменяя скважность), регулируют среднее значение приложенного к якорю двигателя напряжения и частоту вращения электродвигателя. Частоту включения обычно выбирают в пределах 500—1000 Гц. Возможен другой способ импульсного регулирования, когда время включения tр остается постоянным, а период Т изменяется. Такой способ принято называть частотно-импульсным.
Импульсное регулирование электродвигателей постоянного тока является перспективным для тех электроприводов, для которых применяется регулирование изменением приложенного к якорю напряжения. Основным недостатком этого способа является большое число включений, приводящих к появлению больших переходных токов и требующих специальной аппаратуры.
Пуск электродвигателей постоянного тока. Как известно из курса электротехники, вращающий момент электродвигателя при пуске

Пусковой ток может значительно превышать номинальный ток двигателя из-за отсутствия противо-э. д. с. в момент пуска.
При пуске все дополнительные резисторы в цепях независимой и параллельной обмоток возбуждения должны быть введены и последовательная обмотка не шунтирована.
Отечественная промышленность изготовляет электродвигатели, пусковой ток которых по условиям коммутации должен удовлетворять неравенству Iя.п≤2,5Iя.ном.
При этом наибольший пусковой момент двигателей с независимым и параллельным возбуждением при Ф = const будет также Мп≤2,5Мном.
При таком же пусковом токе у двигателей со смешанным и последовательным возбуждением пусковой момент будет несколько больше вследствие увеличения магнитного потока, создаваемого последователь ной обмоткой, по сравнению с номинальным.
По мере увеличения частоты вращения двигателя растет противо- э.д.с., что приводит к уменьшению тока якоря
следовательно, будет уменьшаться вращающий момент двигателя.
Для обеспечения наиболее быстрого разгона двигателя необходимо поддерживать при пуске момент и ток якоря в определенных пределах.
Различают следующие способы пуска электродвигателей постоянного тока: прямой, с ограничением пусковых токов вследствие изменения сопротивления цепи якоря и импульсный.
Прямой пуск осуществляется непосредственно включением двигателя на полное напряжение сети при отсутствии добавочных элементов в цепях якоря и возбуждения. Преимуществами этого способа являются его простота и отсутствие дополнительной пусковой аппаратуры, недостатком — большой ток в цепи якоря в первоначальный момент пуска, что вызывает искрение на коллекторе, возникновение значительного момента на валу двигателя и колебания напряжения в судовой сети. Прямой пуск применяют для двигателей постоянного тока мощностью не более 1,5 кВт.
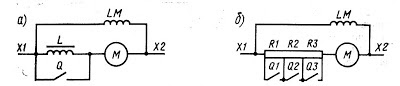
Рис. 2.4. Пуск двигателя постоянного тока
Параметрический пуск основан на предварительном изменении какого-либо параметра двигателя, ограничивающего пусковой ток, с последующим его приведением в процессе пуска к значению соответствующему номинальному режиму.
Для двигателей небольшой мощности применяют пуск с помощью реактора L, включенного последовательно в цепь якоря двигателя (рис. 2.4, а). При правильно подобранной индуктивности реактора время нарастания тока, определяемое электромагнитной постоянной времени электрической цепи,
T = (Lя+L)/Rя
соизмеримо с временем разгона электродвигателя, что значительно снижает пик пускового тока. Недостатками этого способа являются большие габаритные размеры и масса пускового реактора.
Наибольшее применение получил реостатный способ пуска, при этом способе в цепь якоря для ограничения пусковых токов включают дополнительный реостат (рис. 2.4, б), состоящий из трех-четырех резисторов. По мере разгона электродвигателя секции реостата поочередно закорачивают.
В некоторых случаях пользуются способом пуска, основанным на ступенчатом или плавном изменении напряжения, приложенного к якорю двигателя, от нуля до номинального значения. Этот способ возможен при питании якоря электродвигателя от отдельного источника с регулируемым напряжением. В качестве такого источника могут быть использованы генератор постоянного тока с независимым возбуждением, регулируемый трансформатор с выпрямителем, трансформатор с управляемым выпрямителем.
При импульсном пуске, так же как и при импульсном регулировании частоты вращения, может быть использован как широтно-импульсный, так и частотно-импульсный способ. В том и другом случае пуск осуществляется изменением скважности от нуля до номинального значения.
Реверсирование электродвигателей постоянного тока. Реверсирование— изменение направления вращения на противоположное. Для реверсирования необходимо изменить направление вращающего момента М = СмФIя, что возможно осуществить изменением направления тока в якоре электродвигателя или изменением направления магнитного потока путем изменения направления тока в обмотках возбуждения.
Для двигателей с независимым и параллельным возбуждением предпочтительнее первый способ по сравнению со вторым по сле-дующим причинам:
во-первых, при размыкании обмотки возбуждения, предшествующем ее переключению, возникает значительная э. д. с. самоиндукции
затрудняющая процесс коммутации и увеличивающая вероятность пробоя изоляции;
во-вторых, при реверсировании двигатель сначала необходимо остановить, а затем он начинает вращаться в обратную сторону. Но уменьшение магнитного потока вызовет не уменьшение, а увеличение частоты вращения.
Для двигателей со смешанным возбуждением реверсирование изменением направления магнитного потока еще более затруднено по сравнению с двигателем с параллельным возбуждением, так как у него необходимо переключать две обмотки возбуждения. Для двигателей с последовательным возбуждением оба способа равноценны.
Торможение электродвигателей постоянного тока. При режиме торможения электромагнитный момент на валу электродвигателя направлен в сторону, противоположную направлению вращения.
Режимы торможения используются, когда необходимо: остановить электропривод, вращающийся по инерции; остановить электропривод, вращающийся под действием момента, создаваемого рабочей машиной, например: под действием опускаемого подъемным краном груза; замедлить вращение электропривода при воздействии момента, создаваемого рабочей машиной.
Чтобы осуществить режим торможения электродвигателя, нужно изменить направление вращающего момента на его валу, при этом двигатель переходит в генераторный режим работы. В зависимости от использования энергии различают три вида торможения: рекуперативное, динамическое и противовключением. Рекуперативное торможение сопровождается возвратом энергии в питающую сеть. При динамическом торможении и торможении противовключением энергия превращается в тепловую в элементах цепи якоря двигателя.
Торможение с отдачей энергии в сеть, или рекуперативное торможение, наступает, тогда, когда электродвигатель под действием момента рабочей машины (идущий под уклон железнодорожный состав, опускающийся на подъемном кране груз) разгоняется до частоты вращения, превышающей частоту вращения идеального холостого хода. В этом случае э.д.с. якоря будет больше напряжения в сети, ток изменит свое направление и машина будет работать в режиме генератора, отдавая энергию в сеть. При этом направление вращения двигателя не изменится. Механическая характеристика двигателя с параллельным возбуждением О (рис. 2.5) при торможении с отдачей энергии в сеть будет являться продолжением характеристики

Рис. 2.5. Механические характеристики двигателя постоянного тока при рекуперативном торможении
в область отрицательных моментов. Область режима торможения обозначена цифрой II, область двигательного режима — цифрой I.
У двигателей со смешанным возбуждением при переходе в режим торможения ток в последовательной обмотке меняет свое направление, и поэтому она противодействует параллельной обмотке, размагничивая машину и уменьшая момент торможения (штриховая линия). Во избежание этого последовательную обмотку закорачивают или отключают (характеристика I).
Двигатели с последовательным возбуждением не могут работать в режиме торможения с отдачей энергии в сеть, так как с увеличением частоты вращения ток двигателя уменьшается и он размагничивается. Его э.д.с. никогда не может быть больше напряжения в сети.
Динамическое торможение осуществляют отключением якоря от сети и замыканием его на резистор. Различают два вида динамического торможения: с независимым возбуждением и с самовозбуждением.

Рис. 2.6. Схемы включения и механические характеристики двигателей при динамическом торможении
При торможении двигателей с независимым и параллельным возбуждением применяют торможение с независимым возбуждением (рис. 2.6, а).
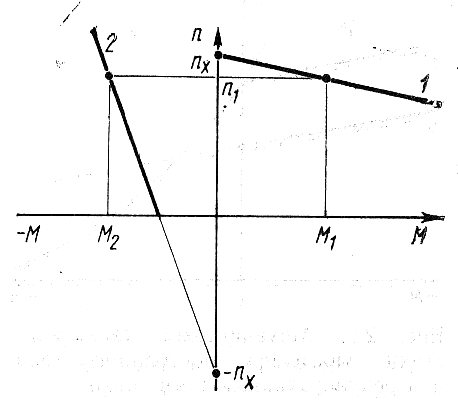
Рис. 2.7. Механическая характеристика двигателя постоянного тока с параллельным возбуждением при торможении противовключением
В этом случае якорь Двигателя отключается от питающей сети и включается на тормозной резистор R1, обмотка возбуждения остается включенной в сеть.
У двигателя со смешанным возбуждением последовательная обмотка отключается или закорачивается.
Торможение двигателя с последовательным возбуждением при питании обмотки возбуждения от сети (рис. 2.6, б) более эффективно, чем торможение с самовозбуждением (рис. 2.6, в), однако для ограничения тока в обмотке необходимо ее подключать через дополнительный резистор R2, мощность рассеяния которого должна равняться мощности электродвигателя
Уравнение механической характеристики при динамическом торможении (при U = 0)
При Ф = const (независимое возбуждение) оно представляет собой уравнение прямой линии.
При самовозбуждении в связи с изменением магнитного потока характеристика искривляется, а при некотором значении частоты вращения самовозбуждение и торможение двигателя прекращаются.
На рис. 2.6, г показаны механические характеристики для динамического торможения: 0 — для торможения с независимым возбуждением; 1 — для торможения с самовозбуждением. Штриховой линией показан участок, на котором торможение прекращается.
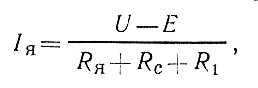
Торможение противовключением производится быстрым реверсированием двигателя по ходу, когда якорь по инерции продолжает вращаться в одном направлении, а обмотки включаются на противоположное. При этих режимах знаки пх и п противоположны, э. д. с. якоря двигателя совпадает по направлению с напряжением и ток якоря
так как в начале торможения Е ≈ U, сопротивление резистора R1 необходимое для ограничения тока до допустимых пределов, должно быть примерно в 2 раза больше пускового сопротивления двигателя. Механическая характеристика при этом способе торможения двигателя с параллельным возбуждением приведена на рис. 2.7 (характеристика 2).
Если двигатель предварительно работал с М1>0 и n1>0 на характеристике 1, то при торможении противовключением уравнение механической характеристики будет

При быстром реверсировании частота вращения двигателя не успеет измениться и режим торможения будет соответствовать точке с моментом М2 и частотой вращения n1 на характеристике 2.
Из рис. 2.7 видно, что при торможении противовключением в момент остановки двигателя (n = 0) момент на его валу не обращается в нуль. Поэтому после остановки двигатель может начать вращаться в обратную сторону. Во избежание этого двигатель после остановки должен быть отключен от сети.
>С увеличением нагрузки на валу двигателя увеличивается так же и ток в якоре. Это вызывает увеличение падения напряжения» сопротивлении обмотки якоря и щеточных контактах.
Так как ток возбуждения остается неизменным (машина нерегулируема), то магнитный поток также постоянен. Однако при увеличении тока в якоре увеличивается размагничивающее действие потока реакции якоря и магнитный поток Ф несколько уменьшится. Увеличение Iяrя вызывает уменьшение скорости двигателя, а уменьшение Ф увеличивает скорость. Обычно падение напряжения влияет на изменение скорости в несколько большей степени, чем реакция якоря, так что с увеличением тока в якоре скорость уменьшается. Изменение скорости у двигателя этого типа незначительно и не превышает 5% при изменении нагрузки от нуля до номинальной, т. е. двигатели параллельного возбуждения имеют жесткую скоростную характеристику.
![]()
При неизменном магнитном потоке зависимость момента от тока в якоре представится прямой линией. Но под воздействием
Вращающий момент двигателя реакции якоря с увеличением нагрузки происходит некоторое уменьшение магнитного потока и зависимость момента пойдет несколько ниже прямой линии.
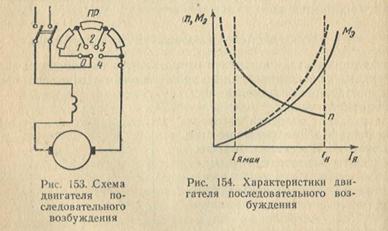
Схема двигателя последовательного возбуждения показана на рис. 153. Пусковой реостат этого двигателя имеет только два зажима, так как обмотка возбуждения и якорь образуют одну последовательную цепь. Характеристики двигателя изображены на рис. 154. Число оборотов двигателя последовательного возбуждения определяется следующим выражением:
![]()
где rс— сопротивление последовательной обмотки возбуждения. В двигателе последовательного возбуждения магнитный поток не остается постоянным, а резко изменяется с изменением нагрузки, что вызывает значительное изменение скорости. Так как падеже напряжения в сопротивлении якоря и в обмотке возбуждения очень мало в сравнении с приложенным напряжением, то число оборотов можно приближенно определить следующим выражением:
![]()
Если пренебречь насыщением стали, то можно считать магнитный поток пропорциональным току в обмотке возбуждения, который равен току в якоре. Следовательно, у двигателя последовательного возбуждения скорость вращения обратно пропорциональна току в якоре и число оборотов резко уменьшается с увеличением нагрузки, т. е. двигатель имеет мягкую скоростную характеристику. С уменьшением нагрузки скорость вращения двигателя увеличивается. При холостом ходе (Iя=0) скорость двигателя беспредельно возрастает, т. е. двигатель идет в разнос.
Таким образом, характерным свойством двигателей последовательного возбуждения является недопустимость сброса нагрузки, т. е. работы вхолостую или при малых нагрузках. Двигатель имеет минимальную допустимую нагрузку, составляющую 25—30% номинальной. При нагрузке меньше минимально допустимой скорость двигателя резко увеличивается, что может вызвать его разрушение. Поэтому, когда возможны сбросы или резкие уменьшения нагрузки, использование двигателей последовательного возбуждения является недопустимым.
В двигателях очень малых мощностей сброс нагрузки не вызывает разноса, так как механические потери двигателя будут достаточно большой нагрузкой для него.
Вращающий момент двигателя последовательного возбуждения, учитывая пропорциональную зависимость между магнитным потоком и током в якоре (Ф = С’Iя), можно определить следующим выражением:
![]()
где K’=KC’
т. е. вращающий момент пропорционален квадрату тока. Однако при больших токах сказывается насыщение стали и зависимость момента приближается к прямой линии. Таким образом двигатели этого типа развивают большие вращающие моменты при малых оборотах, что имеет существенное значение при пуске больших инерционных масс и перегрузках. Эти двигатели широко используют в транспортных и подъемных устройствах.
При смешанном возбуждении возможно как согласное, так и встречное включение обмоток возбуждения.
Двигатели со встречным включением обмоток не нашли широкого применения, так как они обладают плохими пусковыми свойствами и работают неустойчиво.
Скоростные характеристики двигателей смешанного возбуждения занимают промежуточное положение между характеристиками двигателей параллельного и последовательного возбуждения.
С увеличением тока в якоре число оборотов якоря уменьшается в большей мере, чем для двигателей параллельного возбуждения, за счет увеличения магнитного потока, вызываемого увеличением тока в последовательной обмотке возбуждения. При холостом ходе двигатель смешанного возбуждения не идет вразнос, так как магнитный поток не уменьшается до нуля из-за наличия параллельной обмотки возбуждения.
При увеличении нагрузки в двигателях смешанного возбуждения увеличивается магнитный поток и вращающий момент возрастает в большей мере, чем в двигателях параллельного возбуждения, но в меньшей мере, чем в двигателях последовательного возбуждения.
![]()
§ 116 РЕГУЛИРОВАНИЕ СКОРОСТИ ВРАЩЕНИЯ ДВИГАТЕЛЕЙ ПОСТОЯННОГО ТОКА
Двигатели постоянного тока дают возможность плавно и экономично регулировать скорость вращения в широких пределах. В результате этого весьма ценного свойства двигатели постоянного тока получили широкое распространение и часто являются незаменимыми.
Число оборотов якоря двигателя при любой схеме возбуждения определяется следующим выражением:
![]()
где rс — сопротивление последовательной обмотки возбуждения (для двигателя параллельного возбуждения rс=0). Это выражение показывает, что изменение скорости вращения двигателя можно осуществить изменением напряжения сети, сопротивления цепи якоря и магнитного потока.
Регулирование скорости вращения изменением напряжения сети осуществляется в случае, когда источником электрической энергий двигателя является какой-либо генератор.
Для регулирования скорости вращения двигателя изменением сопротивления цепи якоря используется регулировочный реостат, включенный последовательно с якорем. В отличие от пускового регулировочный реостат должен быть рассчитан на длительное прохождение тока. В сопротивлении регулировочного реостата происходит большая потеря энергии, вследствие чего резко уменьшается
п. д. двигателя.
Регулирование скорости вращения якоря двигателя изменением магнитного потока производится изменением тока в обмотке возбуждения. В двигателях параллельного и смешанного возбуждения включается регулировочный реостат. В двигателях последовательного возбуждения изменение тока в обмотке возбуждения достигается шунтированием этой обмотки каким-либо регулируемым сопротивлением. Этот способ регулирования скорости не создает дополнительных потерь и экономичен.
![]()
§ 117. ПОТЕРИ И К. П. Д. МАШИН ПОСТОЯННОГО ТОКА
В машинах постоянного тока при работе происходит потеря энергии, которая складывается из следующих потерь:
1. Потери в стали Рст на гистерезис и вихревые токи, возникающие в сердечнике якоря. При вращении якоря машины сталь его сердечника непрерывно перемагничивается. На перемагничивание стали затрачивается мощность, называемая потерями на гистерезис. Одновременно, при вращении якоря в магнитном поле в сердечнике его индуктируются вихревые токи. Потери на гистерезис и вихревые токи, называемые потерями в стали, обращаются в тепло и нагревают сердечник якоря.
Потери в стали зависят от магнитной индукции и частоты перемагничивания сердечника якоря.
Магнитная индукция зависит от э. д. с. машины или, иначе, от напряжения, а частота перемагничивания — от скорости вращения якоря. Поэтому при работе машины постоянного тока в режиме генератора или двигателя потери в стали будут постоянными, не зависящими от нагрузки, если напряжение на зажимах якоря и скорость его вращения постоянны.
2. Потери энергии на нагревание проводов обмоток возбуждения и якоря протекающими по ним токами, называемые потерями в меди,— Роб.