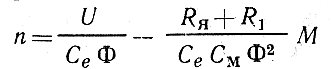
Из формулы (65) следует, что частота вращения якоря электродвигателя постоянного тока зависит от падения напряжения Iя?Rя в цепи обмотки якоря, питающего напряжения U и магнитного потока Ф. Поэтому ее можно регулировать тремя способами:
включением реостата с сопротивлением Rп в цепь обмотки якоря;
изменением питающего напряжения U;
изменением магнитного потока Ф.
Рассмотрим более подробно эти способы на примере двигателей с последовательным и параллельным возбуждением.
Включение реостата в цепь обмотки якоря. При включении реостата с сопротивлением Rп в цепь обмотки якоря, кроме естественной механической характеристики 1, получают и ряд реостатных характеристик 2, 3 и 4 (рис. 133). При этом заданному нагрузочному моменту Мвн соответствуют различные значения частоты вращения n1, n2, n3 и n4; чем больше сопротивление Rп тем меньше частота вращения якоря двигателя. Такой способ регулирования весьма прост и позволяет осуществлять плавное регулирование частоты вращения в широком диапазоне. (Однако при этом возникают большие потери энергии в регулирующем реостате, вследствие чего его практически применяют только при кратковременных режимах работы двигателя (например, при пуске). Другим недостатком рассматриваемого способа регулирования является то, что частоту вращения п можно только уменьшать от n1 до нуля.
Изменение питающего напряжения. При изменении питающего напряжения частота вращения п изменяется пропорционально U. Следовательно, подавая на обмотку якоря различные напряжения U1, U2, U3, можно получить семейство механических характе-
 Рис. 133. Механические характеристики электродвигателей с последовательным (а) и независимым или параллельным (б) возбуждением при регулировании частоты вращения включением реостата в цепь обмотки якоря
Рис. 133. Механические характеристики электродвигателей с последовательным (а) и независимым или параллельным (б) возбуждением при регулировании частоты вращения включением реостата в цепь обмотки якоря
 Рис. 134. Механические характеристики электродвигателя с последовательным (а) и независимым (б) возбуждением при регулировании частоты вращения путем изменения питающего напряжения
Рис. 134. Механические характеристики электродвигателя с последовательным (а) и независимым (б) возбуждением при регулировании частоты вращения путем изменения питающего напряжения
 Рис. 135. Схемы питания электродвигателя с последовательным возбуждением от генератора (а) и выпрямителя (б)
Рис. 135. Схемы питания электродвигателя с последовательным возбуждением от генератора (а) и выпрямителя (б)
ристик 1, 2 и 3, у которых при любой нагрузке n1:n2:n3 = U1:U2:U3 (рис. 134). При уменьшении питающего напряжения механические характеристики двигателя смещаются в область меньших частот вращения и располагаются параллельно. Для осуществления указанного способа регулирования частоты вращения двигатель должен быть подключен к источнику постоянного тока с регулируемым напряжением: к генератору Т с независимым возбуждением (рис. 135, а) или выпрямителю Вn (рис. 135,б). Питание тяговых двигателей от генератора осуществляется на тепловозах, а от выпрямителя — на электровозах и электропоездах переменного тока. На электровозах и электропоездах выпрямитель подключают к трансформатору, позволяющему изменять напряжение, подаваемое на вход выпрямителя, а следовательно, и его выходное напряжение U. На тепловозах в цепях управления имеется специальная электрическая аппаратура, позволяющая изменять ток возбуждения генератора, т. е. его выходное напряжение U, ручным способом или автоматически.
Несмотря на то, что рассмотренный способ требует довольно сложного оборудования, его широко применяют на современных локомотивах и электропоездах, так как он обеспечивает плавное и экономичное (без потерь энергии в реостатах) регулирование частоты вращения в очень широких пределах. Следует отметить, что для электродвигателей с параллельным возбуждением указанный способ регулирования применять нельзя, так как при уменьшении питающего напряжения соответственно уменьшался бы магнитный поток двигателя и увеличивался ток обмотки якоря. В этом случае двигатель должен быть переведен на независимое возбуждение.
На э. п. с. постоянного тока напряжение, подводимое от контактной сети к электровозу или моторному вагону, не может регулироваться, поэтому здесь для изменения подаваемого к двигателям напряжения применяют последовательно-параллельное переключение тяговых двигателей. При этом изменяется напряжение, приходящееся на каждый двигатель локомотива, и частота вращения.
При регулировании частоты вращения двигателей путем их последовательно-параллельного переключения число возможных схем соединений зависит от числа двигателей, установленных на данном локомотиве. Например, на четырехосных электровозах может быть использовано последовательное соединение тяговых двигателей (рис. 136, а); при этом напряжение, подводимое к двигателю, в 4 раза меньше напряжения U в контактной сети и двигатель имеет некоторую минимальную частоту вращения nmin при заданном моменте Мвн. При соединении двигателей в две параллельные группы (рис. 136, б), в каждую из которых включено по два последовательно соединенных двигателя, напряжение, подводимое к каждому двигателю, будет в 2 раза меньше напряжения U в контактной сети и частота его вращения будет составлять 2nmin. Характеристики двигателей при этом располагаются одна над другой (рис. 136, в).
Последовательно-параллельное переключение тяговых двигателей применяют также на тепловозах. Это позволяет ограничить диапазон регулирования напряжения генератора, от которого зависят его габаритные размеры и масса.
Изменение магнитного потока. Для того чтобы изменить магнитный поток Ф, регулируют ток возбуждения двигателя с помощью
 Рис. 136. Схемы соединения тяговых двигателей на четырехосных электровозах или электропоездах (а и б) и механические характеристики двигателей при различных схемах соединения (в): 1 — последовательное соединение; 2— последовательно-параллельное соединение
Рис. 136. Схемы соединения тяговых двигателей на четырехосных электровозах или электропоездах (а и б) и механические характеристики двигателей при различных схемах соединения (в): 1 — последовательное соединение; 2— последовательно-параллельное соединение
 Рис. 137. Схема включения регулировочного реостата параллельно обмотке возбуждения в двигателе с последовательным возбуждением (а) и механические характеристики (б) при различных сопротивлениях реостата
Рис. 137. Схема включения регулировочного реостата параллельно обмотке возбуждения в двигателе с последовательным возбуждением (а) и механические характеристики (б) при различных сопротивлениях реостата
регулировочного реостата Rрв (рис. 137, а). В двигателях с после-довательньм возбуждением регулировочный реостат включают параллельно обмотке возбуждения, вследствие чего через обмотку возбуждения будет протекать только часть тока якоря (другая часть ответвляется в точке О в реостат Rрв). Обычно регулировочный реостат имеет несколько ступеней с сопротивлениями R1, R2, R3, которые позволяют получать несколько ступеней регулирования тока возбуждения двигателя.
Включение ступеней R1, R2, R3 осуществляется контакторами 1, 2 и 3; при этом механические характеристики двигателя 2 (при включении ступени R1), 3 (при включении R1 и R2 и 4 (при включении R1, R2 и R3) располагаются выше естественной характеристики 1 (рис. 137,б).
Степень регулирования тока возбуждения характеризуется коэффициентом регулирования возбуждения ?, который представляет собой отношение тока возбуждения Iв0 при ослабленном возбуждении (включен регулировочный реостат Rрв) к току возбуждения Iвн при нормальном возбуждении при одном и том же токе в обмотке якоря:
? = Iв0/Iвн = Rвн/(Rв+Rвн)
где Rв — сопротивление обмотки возбуждения.
Рассмотренный способ регулирования прост и экономичен, поэтому его широко применяют на локомотивах и электропоездах. Однако в этом случае регулирование частоты вращения можно осуществлять только в сравнительно небольшом диапазоне. Нижний предел nmin ограничивается насыщением магнитной цепи машины, которое не позволяет увеличивать в значительной степени магнитный поток, верхний предел nmax—условиями устойчивости (при сильном уменьшении Ф двигатель идет вразнос), а также тем, что при глубоком ослаблении возбуждения сильно увеличивается ток якоря Iя, что приводит к возрастанию реактивной э. д. с. и искажающего действия реакции якоря. При этом повышается опасность возникновения искрения на коллекторе и появления кругового огня. По этой причине двигатели, предназначенные для работы в режимах глубокого ослабления возбуждения, обязательно должны иметь компенсационную обмотку и пониженное значение реактивной э. д. с. при номинальном режиме. Обычно предельное значение коэффициента возбуждения ? для двигателей без компенсационной обмотки составляет 0,3—0,33, а при наличии компенсационной обмотки — 0,2.
В двигателях с независимым и параллельным возбуждением регулировочный реостат, посредством которого изменяют ток возбуждения Iв и магнитный поток Ф, включают последовательно с обмоткой возбуждения (см. рис. 125). В этом случае при изменении тока возбуждения частота вращения n0 при холостом ходе будет изменяться, т. е. механическая характеристика 2 при ослабленном возбуждении будет располагаться выше характеристики 1 при нормальном возбуждении (рис. 138). Однако характеристики 1 и 2 при различных значениях Ф не будут параллельны, так как согласно формуле (65) изменяется снижение частоты вращения, обусловленное падением напряжения Iя?Rя в цепи обмотки якоря.
Работа электродвигателя с ослабленным возбуждением при переходных процессах. При включении регулировочного реостата параллельно обмотке возбуждения (см. рис. 137, а) приходится применять специальные меры для сохранения требуемого распределения тока между нею и реостатом при переходных процессах, возникающих в случаях резкого изменения режима работы двигателя, изменения напряжения в контактной сети и пр.
При переходных процессах, когда токи Iя, Iв и Iрв изменяются, в обмотке возбуждения возникает значительная э. д. с. самоиндукции еL. В результате ее действия ток Iв уменьшается по сравнению с его значением при стационарном режиме, а ток Iрв возрастает, т. е. происходит значительно большее ослабление возбуждения. Наиболее опасным переходным процессом для тяговых двигателей, работающих с ослабленным возбуждением, является включение их на полное напряжение после кратковременного отключения от
 Рис. 138. Механические характеристики электродвигателя с независимым и параллельным возбуждением при регулировании частоты вращения путем изменения магнитного потока
Рис. 138. Механические характеристики электродвигателя с независимым и параллельным возбуждением при регулировании частоты вращения путем изменения магнитного потока
Рис. 139. Направление электромагнитного момента М при различном направлении тока в обмотке якоря и различной полярности полюсов
 Рис. 140. Схемы переключений обмотки электродвигателя с последовательным возбуждением при изменении направления вращения
Рис. 140. Схемы переключений обмотки электродвигателя с последовательным возбуждением при изменении направления вращения
сети (при отрыве токоприемника от контактного провода). В этом случае из-за большой э. д. с. самоиндукции еL в первый момент после включения почти весь ток Iя пойдет по регулировочному реостату Rрв, а ток Iв в обмотке возбуждения будет мал. Это приведет к значительному возрастанию тока Iя в обмотке якоря из-за уменьшения э. д. с. Е, индуцированной в ней. Практически при этих условиях возникает резкий бросок тока Iя, сопровождающийся нарушением нормальной коммутации (искрением под щетками) и образованием кругового огня. Кроме того, из-за большой скорости изменения тока создаются большие коммутационные перенапряжения, которые могут вызвать пробой изоляции обмоток якоря и возбуждения.
Бросок тока Iя при включении двигателя под напряжение и скорость его изменения зависят от распределения токов Iв и Iрв между обмоткой возбуждения и регулировочным реостатом Rрв. Чтобы обеспечить при переходных процессах такое же распределение токов Iв и Iрв, как и при стационарном режиме, последовательно с реостатом Rрв включают индуктивный шунт ИШ, представляющий собой катушку с ферромагнитным сердечником. Индуктивность этой катушки подбирают так, чтобы отношение индуктивностей обмотки возбуждения и цепи реостата Rрв было приблизительно равно отношению их сопротивлений. При этом условии возникающие при переходных процессах э. д. с. самоиндукции eL в обмотке возбуждения и eL1 в индуктивном шунте не будут влиять на распределение токов Iв и Iрв и возрастание тока Iя будет небольшим.
Изменение направления вращения. Чтобы изменить направление вращения двигателя, необходимо изменить направление электромагнитного момента М, действующего на якорь. Направление момента М определяется правилом левой руки (см. рис. 68,б). Изменить направление М можно двумя способами (рис. 139, а — в): 1) изменением направления тока Iя в обмотке якоря; 2) изменением полярности полюсов, т. е. направления магнитного потока Ф, путем изменения направления тока возбуждения Iв. Для этого переключают провода, подводящие ток к обмотке якоря или к обмотке возбуждения. Например, если при вращении электродвигателя в направлении Вперед ток Iя проходил от щетки А к щетке Б (рис. 140, а), а ток возбуждения Iв — от зажима В1 к зажиму В2, то для перевода двигателя в направление Назад необходимо переключить цепь обмотки якоря так, чтобы ток Iя проходил от щетки Б к щетке А, оставив неизменным направление тока Iв (рис. 140,б), или, оставив неизменным направление тока Iя от А к Б, переключить цепь возбуждения так, чтобы ток Iв проходил от зажима В2 к зажиму В1 (рис. 140, в).

18
Скоростные и механические характеристики двигателя с последовательным возбуждением строят аналогично (рисунок 47, б).
Чтобы изменить направление вращения двигателя, необходимо изменить направление электромагнитного момента М, действующего на якорь. Это можно осуществить двумя способами: путем изменения направления тока Iа в обмотке якоря или изменения направления магнитного потока Φ, т. е. тока возбуждения. Для этого переключают провода, подводящие ток к обмотке якоря или обмотке возбуждения.
9 Тормозные режимы двигателей
9. 1 Электрическое торможение
Электрические двигатели, как правило, используют не только для вращения механизмов, но и для их торможения. Электрическое торможение позволяет быстро остановить механизм или уменьшить его частоту вращения без применения механических тормозов.
Различают три вида электрического торможения двигателей постоянного
тока:
1) рекуперативное торможение – генераторное торможение с отдачей электрической энергии в сеть;
2) динамическое или реостатное торможение – генераторное тор-
можение с гашением выработанной энергии в реостате, подключенном к обмотке якоря;
3) электромагнитное торможение – торможение противовключением.
Во всех указанных режимах электромагнитный момент М воздействует на якорь в направлении, противоположном n, т. е. является тормозным.
Рекуперативное торможение. Двигатель с параллельным возбуждением переходит в режим рекуперативного торможения при увеличении его час-
U
тоты вращения выше n0 = СеΦ. В этом случае ЭДС машины становится
больше напряжения сети и ток изменяет свое направление, т. е. двигатель переходит в генераторный режим. В этом режиме машина создает тормозной момент, а выработанная электрическая энергия отдается в сеть и может быть полезно использована.
В машине с параллельным возбуждением механические характеристики генераторного режима являются продолжением механических характеристик двигательного режима в область отрицательных моментов (рисунок 48, б).
19
Рисунок 48 − Схема и механические характеристики машины постоянного тока в двигательном и генераторном режимах
Поэтому переход из двигательного режима в генераторный может происходить автоматически, если под действием внешнего момента якорь будет вра-
щаться с частотой n выше n0. Можно перевести машину в генераторный режим и принудительно, если перевести ее на работу с характеристики 1 на характе-
ристику 2, уменьшив n0 путем увеличения магнитного потока (тока возбуждения) или снижения напряжения, подводимого к двигателю. В этом случае некоторой частоте вращения n соответствует на характеристике 1 двигательный режим (точка А), а на характеристике 2 – режим рекуперативного торможения (точка В).
Двигатели с последовательным возбуждением не могут переходить в режим рекуперативного торможения. При необходимости реку-
перативного торможения схему двигателей в тормозном режиме изменяют, превращая двигатели в генераторы с независимым возбуждением.
Двигатели со смешанным возбуждением могут автоматически переходить в генераторный режим, что обусловило их применение в троллейбусах, трамваях и других устройствах с частыми остановками, где двигатель должен обладать мягкой механической характеристикой.
Динамическое торможение. При этом виде торможения двигателя с параллельным возбуждением обмотку якоря отключают от сети и присоединяют к ней реостат RДОБ (рисунок 49, а). При этом машина работает как генератор, создает тормозной момент, а выработанная электрическая энергия гасится
Е
в реостате. Регулирование тока Iа = ΣR + R , т. е. тормозного момента М,
a ДОБ
осуществляют путем изменения сопротивления RДОБ, подключенного к обмотке якоря. При n = 0 тормозной момент М равен нулю, следовательно, машина не может быть заторможена в неподвижном состоянии.

20
Рисунок 49 − Схема и механические характеристики двигателя с параллельным возбуждением в режиме динамического торможения
Двигатель с последовательным возбуждением может работать в режиме динамического торможения при независимом возбуждении и при самовозбуждении. При независимом возбуждении обмотку возбуждения отключают от обмотки якоря и подключают к питающей сети последовательно с резистором, сопротивление которого выбирают так, чтобы ток возбуждения не превышал номинального значения. При этом механические характеристики двигателя будут линейные, как на рисунке 49, б. При самовозбуждении при переводе машины в генераторный режим необходимо переключить провода, подводящие ток к обмотке возбуждения (рисунок 50). Последнее необходимо для того, чтобы при изменении направления тока в якоре (при переходе с двигательного режима в генераторный) направление тока в обмотке возбуждения оставалось неизмен-
ным и создаваемая этой обмоткой МДС FB совпадала по направлению с МДС FОCT от остаточного магнетизма. В противном случае генераторы с самовозбуждением размагничиваются.
Рисунок 50 – Схемы машины с последовательным возбуждением в режимах двигательном (а) и динамического торможения (б)
![]()
21
Рисунок 51 − Зависимости ЭДС от тока якоря для двигателя с последовательным возбуждением в режиме динамического торможения
На рисунке 51 показаны зависимости ЭДС Е от тока якоря Iа при различных частотах вращения (n1 > n2 > n3 >n4) и вольт-амперные характеристики
Iа(ΣRa + RДОБ) = f(Iа) полного сопротивления, включенного в цепь якоря
(RДОБ1 > RДОБ2 > RДОБ3).
Точки пересечения А1, А2 и А3 указанных зависимостей определяют зна-
чения тока якоря Iа = Σ СЕnΦ , при котором машина работает в режиме ди-
Ra + RДОБ
намического торможения, а следовательно, и значение тормозного момента М. При увеличении n и неизменном значении RДОБ возрастает ЭДС, ток якоря и тормозной момент.
Самовозбуждение оказывается возможным только при частоте вращения, большей некоторого критического значения nКР, при котором вольт-амперная характеристика сопротивления цепи якоря располагается по касательной к зависимости Е = f(Iа). Так, например, при подключении к машине реостата с сопротивлением RДОБ1 тормозной режим при частоте вращения n1 может быть
реализован (точка А1); при уменьшении же ее до значения n1 он невозможен. Двигатель со смешанным возбуждением также может работать в режиме
динамического торможения.
Электромагнитное торможение. В этом режиме изменяют направ-
ление электромагнитного момента М, сохраняя неизменным направление тока из сети, т. е. момент делают тормозным. Последнее осуществляют так же, как и при изменении направления вращения двигателя – путем переключения проводов, подводящих ток к обмотке якоря (рисунок 52, а) или к обмотке возбужде-
Соседние файлы в папке Методички
- #
- #
- #
- #
Реверс двигателя — это изменение вращения ротора на противоположное. Изменить направление вращения можно у электродвигателя постоянного тока, асинхронного и коллекторного двигателя переменного тока. Сложно представить себе устройство, в котором не применяется реверсивное вращение электродвигателя. Без изменения вращения невозможно представить работу тельфера, кран-балки, лебедок, грузоподъемных механизмов, лифтов, задвижек и т.п. Исключение составляют такие устройства, как заточные станки, вытяжки и т.д. В этой статье мы расскажем читателям сайта Сам Электрик, как осуществить реверс электродвигателей разных типов.
Способы пуска и реверса ДПТ
Двигатели постоянного тока запускаются с ограничением тока якоря до значений не более 2,5 , для этого в нерегулируемых проводах последовательно с якорем включается пусковой (добавочный) резистор Rдоб
, который после запуска шунтируется контактором
КМ
автоматически, в функции тока, ЭДС якоря или времени (рисунок 3.8). Величина сопротивления этого резистора определяется из формулы (3.4). Для принятых условий:
.
Рисунок 3.8. К вопросу о пуске ДПТ с добавочным резистором.
Диаграмма пуска имеет вид рисунка 3.9. Электродвигатель разгоняется по искусственной механической характеристики из точки «а» в точку «б». При скорости ωпер
шунтируется добавочный резистор контактом, от чего двигатель переходит на естественную характеристику в точку «б» и далее разгоняется до точки «г». В этой точке его механическая характеристика пересекается с механической характеристикой рабочей машины (
Мс
) и процесс разбега заканчивается.
Рисунок 3.9. Пусковая диаграмма ДПТ параллельного возбуждения с одним добавочным резистором.
При значительном моменте Мс
одним добавочным резистором не обеспечивается условие
. Приходится использовать 3 или 4 добавочных резистора. В этом случае токовая диаграмма имеет 3 или 4 ступени пуска.
В современных приводах в ДПТ, получают питание от преобразователей,
основной способ пуска постепенное повышение напряжения на якоре. Это обеспечивает плавный пуск с ограничением тока якоря.
Реверс ДПТ можно производить, изменяя направление тока в обмотке якоря или в обмотке возбуждения. Обычно изменяют направление тока в обмотке якоря, потому что она имеет меньшую индуктивность и возникает меньшая дуга на контактах при переключении.
Для простых приводов, без преобразователей, типовая схема реверса изображена на рисунке 3.10. В период реверса в якорь включается добавочный резистор Rдоб
для ограничения тока якоря до значения
.
Рисунок 3.10. Типовая схема реверса ДПТ в нерегулируемых проводах: В – контакты контактора «вперед»; Н – контакты контакторов «назад».
В регулируемых приводах с ДПТ, имеющих преобразователи, часть используется вторая группа вентилей, включение которой вызывает изменение направления тока в якоре и реверс электродвигателя. Обычно такое решение применяют при работе электропривода с частыми реверсами. Принципиальная схема реверса ДПТ с двумя группами вентилей UZ1 и UZ2 изображена на рисунке 3.11. При реверсе контролирует ток якоря путем изменения напряжений на его зажимах.
Рисунок 3.11. Принципиальная схема регулируемого электропривода с ДПТ для режимов частых реверсов.
8 Характеристики генератора параллельного возбуждения
Характеристика холостого хода U=f (Iв) при I=0 и n=const. В процессе самовозбуждения в генераторах параллельного возбуждения Ia=Iв, причем Iв=(0,02…0,03) Iн. Поэтому можно пренебречь реакцией якоря и падением напряжения в обмотке якоря и считать, что между характеристиками холостого хода генератора параллельного возбуждения и независимого возбуждения практически нет разницы. Следует учесть, что эта характеристика может быть снята только в одном квадранте, так как процесс самовозбуждения в данном генераторе может протекать только в одном направлении при согласном действии остаточного магнитного потока и потока, создаваемого током возбуждения, причем на прямолинейном участке характеристики напряжение генератора не удается регулировать как у генератора независимого возбуждения, что определяет меньший диапазон регулирования его напряжения.
Нагрузочная характеристика U=f (Iв) при I=const и n=const. Нагрузочные характеристики генератора параллельного возбуждения практически совпадают с характеристиками генератора независимого возбуждения, так как увеличение тока Iа на величину тока возбуждения при параллельном возбуждении не может оказать заметного влияния на напряжение генератора.
Внешняя характеристика U=f (I) при rв=const и n=const (рисунок 1) показывает влияние изменения нагрузки на напряжение генератора. При этом ток возбуждения не регулируется с помощью регулировочного реостата. Следует учесть, что при независимом возбуждении
а при параллельном возбуждении
Последнее равенство означает, что при снятии внешней характеристики ток возбуждения генератора изменяется пропорционально напряжению на генераторе. Таким образом, уменьшение напряжения генератора параллельного возбуждения при увеличении его нагрузки вызывается не только размагничивающим действием реакции якоря и падением напряжения в цепи якоря, но и уменьшением тока возбуждения. Поэтому внешняя характеристика генератора параллельного возбуждения (рисунок 1 ) (кривая 1) располагается ниже внешней характеристики генератора независимого возбуждения (кривая 2).
В генераторе параллельного возведения ток нагрузки I будет увеличиваться только до определенного критического значения Iкр=(2. 2,5) Iн, после чего он начнет уменьшаться до Iко

Регулировочная характеристика Iв=f (I) при n=const и U=const снимается так же как и для генератора независимого возбуждения и практически получается такой же, как и при независимом возбуждении, т.к. ток возбуждения очень мал и падение напряжения Iвraв цепи якоря от тока возбуждения также очень мало и не оказывает заметного влияния на напряжение генератора.
Характеристика короткого замыкания Iк=f (Iв) при n=const и U=0 может быть снята только при питании обмотки возбуждения от постороннего источника, т.к. при самовозбуждении при U=0 ток возбуждения Iв=0
8 уравнения генератора постоянного тока
Любая электрическая машина обладает свойством обратимости, т.е. может работать в режиме генератора или двигателя. Если к зажимам приведенного во вращение якоря генератора присоединить сопротивление нагрузки, то под действием ЭДС якорной обмотки в цепи возникает ток
(2)
Уравнение (2) называется основным уравнением генератора. С появлением тока в проводниках обмотки возникнут электромагнитные силы. На рис. 5 схематично изображен генератор постоянного тока, показаны направления токов в проводниках якорной обмотки.
Воспользовавшись правилом левой руки, видим, что электромагнитные силы создают электромагнитный момент Мэм, препятствующий вращению якоря генератора. Чтобы машина работала в качестве генератора, необходимо первичным двигателем вращать ее якорь, преодолевая тормозной электромагнитный момент, возникающий по правилу Ленца.
Нам важно ваше мнение! Был ли полезен опубликованный материал? Да | Нет
Источник
Что такое реверс
Проще говоря, реверс – это изменение направления движения какого-либо механизма в противоположную сторону от выбранного основного. Схему реверса можно получить несколькими способами:
В первом случае при помощи переключения шестеренчатых связей, соединяющих ведущий вал с ведомым, добиваются вращения последнего в обратную сторону. По такому принципу работают все коробки передач.
Электрический способ подразумевает непосредственное воздействие на сам двигатель, где в изменении движения ротора принимают участие электромагнитные силы. Этот метод выигрывает тем, что не требует применения сложных механических преобразований.
Для того, чтобы получить реверс электродвигателя, необходимо собрать специальную электрическую схему, которая так и называется – схема реверса двигателя. Она будет отличаться для разных типов электрических машин и питающего напряжения.
Пуск и реверс двигателя постоянного тока
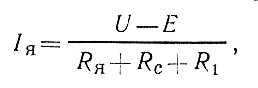
Ток якорной обмотки определяется выражением

При пуске двигателя якорь неподвижен, противо-ЭДС равна нулю. Сопротивление якорной обмотки незначительное, поэтому при Uя = Uн пусковой ток якоря Iяпуск во много раз превышает ток в номинальном режиме Iя н, что приводит к повреждению двигателя.
Ограничение пускового тока в ДПТ с параллельным возбуждением производится введением последовательно в цепь якоря пускового реостата Rдя (рис. 5.7).
Ток при пуске тогда будет равен

Пуск должен производиться при номинальном магнитном потоке Фн, при этом согласно уравнению увеличивается пусковой момент и быстрее увеличивается ЭДС обмотки якоря. Это приводит к ускоренному разгону и сокращению времени прохождения большого пускового тока.
Запуск мотора схемой звезда-треугольник
При прямом запуске мощных трехфазных электродвигателей, применяя схему управления реверсом, происходят просадки напряжения в сети. Это связано с большими пусковыми токами, протекающими в этот момент. Чтобы снизить значение тока, применяют постепенный запуск мотора по схеме звезда-треугольник.
Суть заключается в том, что начало и конец каждой обмотки статора выводят в коробку с клеммами. Управляется схема тремя контакторами. Они поэтапно включают обмотки в звезду, а далее при разгоне двигателя выводят систему на рабочее состояние при подключении треугольником.
Кпд и потери мощности машин постоянного тока
Потери в электрических машинах делят на основные и добавочные. К основным потерям относят электрические, магнитные и механические.
Электрические потери ΔРэл или потери в меди обмоток, состоят из потерь в активных сопротивлениях обмоток и потерь в переходном сопротивлении щеточного контакта. Они определяются, как суммарные потери в обмотке якоря
где Rя – сопротивление цепи обмотки якоря с учетом переходного сопротивления щеточного контакта.
Магнитные потери или потери в стали обозначают ΔРс. В процессе работы сердечник якоря машины постоянного тока перемагничивается. Поэтому в сердечнике якоря возникают потери на вихревые токи и гистерезис.
Механические потери ΔРмех состоят из потерь на трение в подшипниках, потерь на трение щеток о коллектор, потерь на трение вращающихся частей машины о воздух, а также потерь вентиляционных.
Суммарные потери равны
.
В режиме холостого хода электрические потери незначительны, мощность потребляемая машиной из сети
Потери холостого хода называют постоянными потерями
, так как они не зависят от нагрузки.
Электрические потери называют переменными потерями
Коэффициент полезного действия (КПД) определяется как отношение полезной, или отдаваемой, мощности P2 к потребляемой мощности P1


Электрическая мощность, потребляемая двигателем из сети P1 = Pя + Pв,
Для двигателя параллельного возбуждения
Механическая мощность на валу двигателя, отдаваемая приводному механизму P2=ωМ.
Современные машины постоянного тока имеют высокий КПД, который в зависимости от мощности, колеблется в пределах ηн = 0,75÷0,96. Высшее значение КПД относится к машинам большей мощности.
Тут вы можете оставить комментарий к выбранному абзацу или сообщить об ошибке.
Источник
Переменная сеть: мотор 380 к сети 380
Для реверсивного подключения трехфазного асинхронного электродвигателя возьмем за основу схему его включения без реверса:
Эта схема позволяет вращаться валу только в одну сторону – вперед. Чтобы заставить его повернуться в другую, нужно поменять местами любые две фазы. Но в электрике принято менять только А и В, несмотря на то, что к такому же результату привели бы смены А на С и В на С. Схематично это будет выглядеть так:
Для подключения дополнительно понадобятся:
Важно! В электрике нормально замкнутый контакт – это состояние кнопочного контакта, у которого есть только два несимметричных состояния. Первое положение (нормальное) – рабочее (замкнуто), а второе – пассивное (разомкнуто). Точно так же формулируется понятие нормально разомкнутого контакта. В первом положении кнопка пассивна, а во втором – активна. Понятно, что такая кнопка будет называться «СТОП», в то время как две другие: «ВПЕРЕД» и «НАЗАД».
Схема реверсивного подключения мало отличается от простой. Главное ее отличие состоит в электроблокировке. Она необходима для исключения пуска мотора сразу в двух направлениях, что привело бы к поломке. Конструктивно блокировка – это блок с клеммами магнитных пускателей, которые соединены в управляющей цепи.
Для запуска двигателя:
Если нужно сменить направление, то сначала нужно нажать кнопку «СТОП». Затем включить другую пусковую кнопку. Электрическая блокировка не позволяет активировать ее, если мотор не выключен.
Как реализовать схему реверса?
Для перемены направленности вращения ротора, нужно поменять местами 2 из 3 фазы его обмотки. Тогда электромагнитное поле статора меняет свою направленность движения, при этом ротор в первоначальный период времени, двигаясь по инерции, станет притормаживаться, пока окончательно не остановится. И только потом он будет крутиться в другом направлении.
Замену полярности электро-пусковой обмотки возможно сделать с управляющим тумблером по схеме. Его можно подобрать с 2 или 3 зафиксированными положениями и 6 выходами. Выбирать такое устройство нужно по токовой нагрузке и разрешенному напряжению.
Пропускать ток на тумблер предпочтительнее от вспомогательной обмотки, которая работает непродолжительно. Перечисленное, даст возможность значительно увеличить рабочий ресурс контактной группы.
Реверс асинхронного двигателя с конденсаторным запуском лучше выполнять по следующей схеме:
- При тяжелом пуске параллельно к главному конденсатору, используя средний контакт с самовозвратом ПНВ, подсоединяют добавочный конденсатор.
- В таком примере переключают тумблер реверса только при заторможенном роторе, и никак не при его вращении.
- Случайная перемена направленности работы мотора под напряжением, сопряжена с огромными скачками тока, что истощает его мото-ресурс. По этой причине посадочное место тумблера реверса на оборудовании нужно подбирать таким образом, чтобы сделать невозможным случайное включение его во время работы. Лучше установить его в каком-то углубленном месте конструкции.
Если электродвигатель не работает должным образом после сборки схемы, потребуется дважды перепроверить, что провода идут к правильным клеммам переключателя. И также удостоверится, что проводка не ослаблена или не повреждена.
Рекомендуется использовать увеличительное стекло, чтобы убедиться, что соединения выполнены правильно и даже самая тонкая нить провода случайно не касается другого проводка или клеммы.
Переменная сеть: электродвигатель 220 к сети 220
Реверс электродвигателя 220В возможен только в том случае, если выводы обмоток лежат вне корпуса. На рисунке ниже – схема однофазного включения, когда пусковая и рабочая намотки расположены внутри и выводов наружу не имеют. Если это ваш вариант, вы не сможете изменить направление вращения вала.

В любом другом случае для реверсирования однофазного конденсаторного АД необходимо поменять направление рабочей обмотки. Для этого вам понадобятся:
Схема однофазного агрегата почти ничем не отличается от той, что представлена для трехфазного асинхронного двигателя. Ранее мы перекидывали фазы: А и В. Сейчас при смене направления вместо фазного провода с одной стороны рабочей обмотки будет подключаться нулевой, а с другой – вместо нулевого фазный. И наоборот.
Постановка задачи
Предположим, что у уже подсоединенного с использованием пускозарядной емкости асинхронного однофазного двигателя изначально вращение вала направлено по часовой стрелке, как на картинке ниже.

Уточним важные моменты:
- Точкой А отмечено начало пусковой обмотки, а точкой В – ее окончание. К начальной клемме A подсоединен провод коричневого, а к конечной – зеленого цвета.
- Точкой С помечено начало рабочей обмотки, а точкой D – ее окончание. К начальному контакту подсоединен провод красного, а к конечному – синего цвета.
- Направление вращения ротора обозначено с помощью стрелок.
Ставим перед собой задачу – сделать реверс однофазного двигателя без вскрытия его корпуса так, чтобы ротор начал вращаться в другую сторону (в данном примере против движения стрелки часов). Ее можно решить тремя способами. Рассмотрим их подробнее.
Переменная сеть: 380В к 220В
Для подключения трехфазного асинхронного двигателя к электросети 220В необходимо использовать один или два конденсатора для компенсации отсутствующей фазы: рабочий и пусковой. Направление вращательного движения зависит от того, с чем соединяется третья обмотка.
Чтобы заставить вал вращаться в другую сторону, обмотку №3 необходимо подключить с помощью конденсатора к тумблеру с двумя позициями. Он должен иметь два контакта, соединенных с обмотками №1 и №2. Ниже показана подробная схема.
Такой мотор будет играть роль однофазного, поскольку подключение происходило с помощью одного фазного провода. Чтобы запустить его, необходимо перевести реверсирующий тумблер в нужное положение («вперед» или «назад), затем перевести тумблер «пуск» в положение «включено». На момент запуска необходимо нажать одноименную кнопку – «пуск». Держать ее нужно не более трех секунд. Этого будет достаточно для разгона.
Реверс однофазных синхронных машин
Для запуска этим моторам необходима вторая обмотка на статоре, в цепь которой включен фазосдвигающий элемент, обычно бумажный конденсатор. Реверсировать можно только те, у которых обе статорных обмотки равнозначны – по диаметру провода, числу витков, а также при условии, что одна из них не отключается после набора оборотов.
Суть схемы реверсирования в том, что фазосдвигающий конденсатор будет подключаться то к одной из обмоток, то к другой. Для примера рассмотрим асинхронный однофазный двигатель АИРЕ 80С2 мощностью 2,2 кВт.
В его клеммной коробке шесть резьбовых выводов, обозначенных литерами с цифрами W2 и W1, U1 и U2, V1 и V2. Чтобы двигатель вращался по часовой стрелке, коммутация производится следующим образом:
Чтобы вращение происходило против часовой стрелки, изменяют положение перемычек, они ставятся по схеме W2–U2 и U1– W1. Схема автоматического реверса строится так же на двух магнитных пускателях и трех кнопках – двух нормально разомкнутых «Пуск» и одной нормально замкнутой «Стоп».
Постоянный электроток: особенности
Двигатели постоянного тока подключаются труднее моторов, питающихся от переменной сети. Потому что для того чтобы соединить обмотки, нужно точно знать, какой марки ваш агрегат. Только потом можно найти подходящую схему.
Но в любом электромоторе постоянного тока есть якорь и намотка возбуждения. От способа их включения их делят на агрегаты:
Электродвигатели постоянного тока с независимым возбуждением (схематично изображены ниже) применяется на производствах. Их намотка никак не связана с якорем, потому что подключается к другому электрическому источнику.
В станках и вентиляторах применяются моторы однофазного питания с параллельным возбуждением. Тут нет надобности во втором источнике.
В электротранспорте применяются агрегаты с последовательным возбуждением.
Если одна намотка параллельна якорю, а другая последовательна, то такой способ подключения – смешанный. Он встречается редко.
Все способы включения электродвигателей постоянного тока могут реверсироваться:
Реверсирование двигателя постоянного тока с независимым возбуждением выполняется так же.
Имейте в виду, что в розетке ток переменный. Но это не значит, что он переменный во всех электроприборах, оснащенных электродвигателем и включенных в нее. Ток из переменного фазного может стать постоянным, пройдя через выпрямитель. Фазного питания вообще может не быть, если двигатель запитан от батареи.
Реверс трехфазных асинхронных машин
Направление движения вращающегося магнитного поля асинхронных электродвигателей зависит от порядка подачи фаз, независимо от того как соединены его статорные обмотки – звездой или треугольником. Например, если фазы A, B, C подать на входные клеммы 1, 2 и 3 соответственно, то вращение пойдет (предположим) по часовой стрелке, а если на клеммы 2, 1, и 3, то против нее. Схема подключения через магнитный пускатель избавит вас от необходимости откручивать гайки в клеммной коробке и производить физическую перестановку проводов.
Регулирование частоты вращения. Частоту вращения электродвигателей постоянного тока регулируют: введением резисторов в цепь якоря двигателя; изменением магнитного потока; изменением напряжения, приложенного к якорю электродвигателя.
В зависимости от способа регулирования частоты вращения получаются различные искусственные механические характеристики.
При введении резисторов в цепь якоря у двигателей с независимым и параллельным возбуждением магнитный поток не изменяется, следовательно, остается постоянной частота вращения идеального холостого хода nx, но значение сопротивления вводимого резистора оказывает большое влияние на наклон механической характеристики, так как возрастает угловой коэффициент:
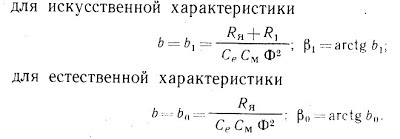
Поэтому искусственная механическая характеристика двигателей с независимым и параллельным возбуждением представляет собой прямую линию 1 (рис. 2.3), проходящую через одну точку nx с естественной характеристикой 0 и наклоном β1, определяемым значением сопротивления вводимого резистора.

Рис. 2.3. Механические характеристики электродвигателя с параллельным возбуждением
Изменение сопротивления цепи якоря для двигателя с последовательным возбуждением приведет к смещению характеристики вниз в сторону уменьшения n.
Магнитный поток электродвигателей можно изменить введением дополнительного резистора в цепь обмотки возбуждения, причем уменьшаются ток возбуждения и магнитный поток двигателя.
Изменение магнитного потока приводит к увеличению частоты вращения идеального холостого хода и изменению наклона механической характеристики у двигателей с независимым, параллельным и смешанным возбуждением.
Действительно, если Ф = Ф0, то для естественной характеристики
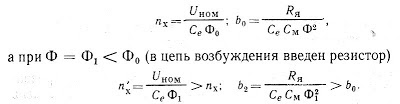
Таким образом, искусственная механическая характеристика, полученная при введении резистора в цепь обмотки возбуждения двигателя, располагается выше естественной (характеристика 2), частота вращения идеального холостого хода и наклон характеристики увеличиваются.
Изменение питающего цепь якоря напряжения при неизменном напряжении в цепи независимой обмотки возбуждения приводит у двигателей с независимым возбуждением к изменению частоты вращения идеального холостого хода при неизменном наклоне характеристики.

Следовательно, искусственная характеристика расположится ниже естественной и будет параллельна ей (характеристика 3). У двигателя, имеющего смешанное возбуждение, искусственная характеристика также будет ниже естественной.
Анализируя полученные механические характеристики электродвигателей постоянного тока, можно установить, что при одном и том же моменте на валу электродвигателя частота вращения его на разных характеристиках будет различной. Поэтому частоту вращения электродвигателей регулируют способами, используемыми для получения искусственных характеристик. Различают параметрическое и импульсное регулирование.
При параметрическом способе изменяется какой-либо параметр, который далее остается неизменным. Импульсное регулирование характеризуется периодическим ступенчатым изменением какого-либо параметра с определенной частотой.
Каждому из параметрических способов присущи свои особенности, определившие область их применения.
Введение резистора в цепь якоря приводит к уменьшению частоты вращения, причем эффективность регулирования тем больше, чем больше нагружен двигатель. Способ не экономичен из-за больших потерь энергии в дополнительном резисторе, но все же используется вследствие его простоты.
Введение резистора в цепь обмотки возбуждения приводит к увеличению частоты вращения. Этот способ экономичен, так как ток возбуждения составляет 2—5 % тока якоря и потери в резисторе невелики. Однако этот способ не позволяет получить частоту вращения двигателя меньше номинальной.
Изменение приложенного к якорю напряжения — наиболее удачный способ регулирования. Он экономичен и допускает регулирование частоты вращения в достаточно широких пределах при любых значениях нагрузки, но требует автономных источников питания с широким диапазоном изменения напряжения. Поэтому его целесообразно применять для электроприводов с частыми пусками и большим диапазоном регулирования частоты вращения электродвигателя (рулевые электроприводы, электроприводы оперативных лебедок земснарядов, гребные электрические установки и т.п.). Автономным источником питания может служить генератор постоянного тока с независимым возбуждением. Напряжение можно регулировать с помощью управляемого выпрямителя или магнитного усилителя.
Из импульсных способов регулирования двигателей постоянного тока наиболее широкое распространение получил способ изменения времени включения приложенного к якорю напряжения при постоянной частоте включения. Этот способ называется широтно-импульсным. Среднее значение приложенного к якорю напряжения

Изменяя tp при постоянном Т (изменяя скважность), регулируют среднее значение приложенного к якорю двигателя напряжения и частоту вращения электродвигателя. Частоту включения обычно выбирают в пределах 500—1000 Гц. Возможен другой способ импульсного регулирования, когда время включения tр остается постоянным, а период Т изменяется. Такой способ принято называть частотно-импульсным.
Импульсное регулирование электродвигателей постоянного тока является перспективным для тех электроприводов, для которых применяется регулирование изменением приложенного к якорю напряжения. Основным недостатком этого способа является большое число включений, приводящих к появлению больших переходных токов и требующих специальной аппаратуры.
Пуск электродвигателей постоянного тока. Как известно из курса электротехники, вращающий момент электродвигателя при пуске

Пусковой ток может значительно превышать номинальный ток двигателя из-за отсутствия противо-э. д. с. в момент пуска.
При пуске все дополнительные резисторы в цепях независимой и параллельной обмоток возбуждения должны быть введены и последовательная обмотка не шунтирована.
Отечественная промышленность изготовляет электродвигатели, пусковой ток которых по условиям коммутации должен удовлетворять неравенству Iя.п≤2,5Iя.ном.
При этом наибольший пусковой момент двигателей с независимым и параллельным возбуждением при Ф = const будет также Мп≤2,5Мном.
При таком же пусковом токе у двигателей со смешанным и последовательным возбуждением пусковой момент будет несколько больше вследствие увеличения магнитного потока, создаваемого последователь ной обмоткой, по сравнению с номинальным.
По мере увеличения частоты вращения двигателя растет противо- э.д.с., что приводит к уменьшению тока якоря
следовательно, будет уменьшаться вращающий момент двигателя.
Для обеспечения наиболее быстрого разгона двигателя необходимо поддерживать при пуске момент и ток якоря в определенных пределах.
Различают следующие способы пуска электродвигателей постоянного тока: прямой, с ограничением пусковых токов вследствие изменения сопротивления цепи якоря и импульсный.
Прямой пуск осуществляется непосредственно включением двигателя на полное напряжение сети при отсутствии добавочных элементов в цепях якоря и возбуждения. Преимуществами этого способа являются его простота и отсутствие дополнительной пусковой аппаратуры, недостатком — большой ток в цепи якоря в первоначальный момент пуска, что вызывает искрение на коллекторе, возникновение значительного момента на валу двигателя и колебания напряжения в судовой сети. Прямой пуск применяют для двигателей постоянного тока мощностью не более 1,5 кВт.
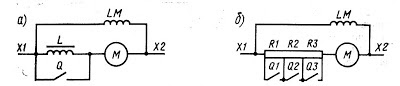
Рис. 2.4. Пуск двигателя постоянного тока
Параметрический пуск основан на предварительном изменении какого-либо параметра двигателя, ограничивающего пусковой ток, с последующим его приведением в процессе пуска к значению соответствующему номинальному режиму.
Для двигателей небольшой мощности применяют пуск с помощью реактора L, включенного последовательно в цепь якоря двигателя (рис. 2.4, а). При правильно подобранной индуктивности реактора время нарастания тока, определяемое электромагнитной постоянной времени электрической цепи,
T = (Lя+L)/Rя
соизмеримо с временем разгона электродвигателя, что значительно снижает пик пускового тока. Недостатками этого способа являются большие габаритные размеры и масса пускового реактора.
Наибольшее применение получил реостатный способ пуска, при этом способе в цепь якоря для ограничения пусковых токов включают дополнительный реостат (рис. 2.4, б), состоящий из трех-четырех резисторов. По мере разгона электродвигателя секции реостата поочередно закорачивают.
В некоторых случаях пользуются способом пуска, основанным на ступенчатом или плавном изменении напряжения, приложенного к якорю двигателя, от нуля до номинального значения. Этот способ возможен при питании якоря электродвигателя от отдельного источника с регулируемым напряжением. В качестве такого источника могут быть использованы генератор постоянного тока с независимым возбуждением, регулируемый трансформатор с выпрямителем, трансформатор с управляемым выпрямителем.
При импульсном пуске, так же как и при импульсном регулировании частоты вращения, может быть использован как широтно-импульсный, так и частотно-импульсный способ. В том и другом случае пуск осуществляется изменением скважности от нуля до номинального значения.
Реверсирование электродвигателей постоянного тока. Реверсирование— изменение направления вращения на противоположное. Для реверсирования необходимо изменить направление вращающего момента М = СмФIя, что возможно осуществить изменением направления тока в якоре электродвигателя или изменением направления магнитного потока путем изменения направления тока в обмотках возбуждения.
Для двигателей с независимым и параллельным возбуждением предпочтительнее первый способ по сравнению со вторым по сле-дующим причинам:
во-первых, при размыкании обмотки возбуждения, предшествующем ее переключению, возникает значительная э. д. с. самоиндукции
затрудняющая процесс коммутации и увеличивающая вероятность пробоя изоляции;
во-вторых, при реверсировании двигатель сначала необходимо остановить, а затем он начинает вращаться в обратную сторону. Но уменьшение магнитного потока вызовет не уменьшение, а увеличение частоты вращения.
Для двигателей со смешанным возбуждением реверсирование изменением направления магнитного потока еще более затруднено по сравнению с двигателем с параллельным возбуждением, так как у него необходимо переключать две обмотки возбуждения. Для двигателей с последовательным возбуждением оба способа равноценны.
Торможение электродвигателей постоянного тока. При режиме торможения электромагнитный момент на валу электродвигателя направлен в сторону, противоположную направлению вращения.
Режимы торможения используются, когда необходимо: остановить электропривод, вращающийся по инерции; остановить электропривод, вращающийся под действием момента, создаваемого рабочей машиной, например: под действием опускаемого подъемным краном груза; замедлить вращение электропривода при воздействии момента, создаваемого рабочей машиной.
Чтобы осуществить режим торможения электродвигателя, нужно изменить направление вращающего момента на его валу, при этом двигатель переходит в генераторный режим работы. В зависимости от использования энергии различают три вида торможения: рекуперативное, динамическое и противовключением. Рекуперативное торможение сопровождается возвратом энергии в питающую сеть. При динамическом торможении и торможении противовключением энергия превращается в тепловую в элементах цепи якоря двигателя.
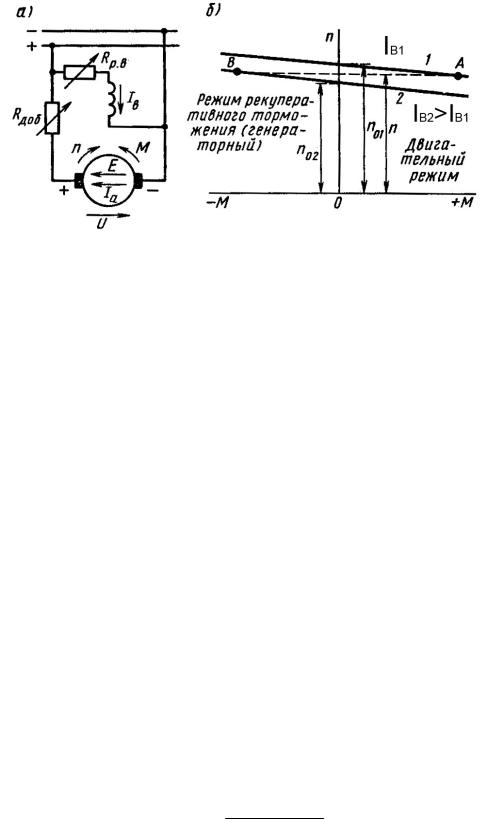
Торможение с отдачей энергии в сеть, или рекуперативное торможение, наступает, тогда, когда электродвигатель под действием момента рабочей машины (идущий под уклон железнодорожный состав, опускающийся на подъемном кране груз) разгоняется до частоты вращения, превышающей частоту вращения идеального холостого хода. В этом случае э.д.с. якоря будет больше напряжения в сети, ток изменит свое направление и машина будет работать в режиме генератора, отдавая энергию в сеть. При этом направление вращения двигателя не изменится. Механическая характеристика двигателя с параллельным возбуждением О (рис. 2.5) при торможении с отдачей энергии в сеть будет являться продолжением характеристики

Рис. 2.5. Механические характеристики двигателя постоянного тока при рекуперативном торможении
в область отрицательных моментов. Область режима торможения обозначена цифрой II, область двигательного режима — цифрой I.
У двигателей со смешанным возбуждением при переходе в режим торможения ток в последовательной обмотке меняет свое направление, и поэтому она противодействует параллельной обмотке, размагничивая машину и уменьшая момент торможения (штриховая линия). Во избежание этого последовательную обмотку закорачивают или отключают (характеристика I).
Двигатели с последовательным возбуждением не могут работать в режиме торможения с отдачей энергии в сеть, так как с увеличением частоты вращения ток двигателя уменьшается и он размагничивается. Его э.д.с. никогда не может быть больше напряжения в сети.
Динамическое торможение осуществляют отключением якоря от сети и замыканием его на резистор. Различают два вида динамического торможения: с независимым возбуждением и с самовозбуждением.

Рис. 2.6. Схемы включения и механические характеристики двигателей при динамическом торможении
При торможении двигателей с независимым и параллельным возбуждением применяют торможение с независимым возбуждением (рис. 2.6, а).
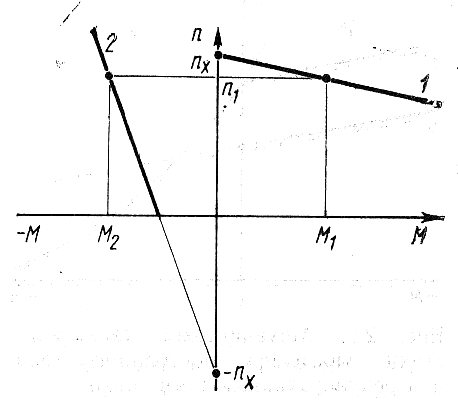
Рис. 2.7. Механическая характеристика двигателя постоянного тока с параллельным возбуждением при торможении противовключением
В этом случае якорь Двигателя отключается от питающей сети и включается на тормозной резистор R1, обмотка возбуждения остается включенной в сеть.
У двигателя со смешанным возбуждением последовательная обмотка отключается или закорачивается.
Торможение двигателя с последовательным возбуждением при питании обмотки возбуждения от сети (рис. 2.6, б) более эффективно, чем торможение с самовозбуждением (рис. 2.6, в), однако для ограничения тока в обмотке необходимо ее подключать через дополнительный резистор R2, мощность рассеяния которого должна равняться мощности электродвигателя
Уравнение механической характеристики при динамическом торможении (при U = 0)
При Ф = const (независимое возбуждение) оно представляет собой уравнение прямой линии.
При самовозбуждении в связи с изменением магнитного потока характеристика искривляется, а при некотором значении частоты вращения самовозбуждение и торможение двигателя прекращаются.
На рис. 2.6, г показаны механические характеристики для динамического торможения: 0 — для торможения с независимым возбуждением; 1 — для торможения с самовозбуждением. Штриховой линией показан участок, на котором торможение прекращается.
Торможение противовключением производится быстрым реверсированием двигателя по ходу, когда якорь по инерции продолжает вращаться в одном направлении, а обмотки включаются на противоположное. При этих режимах знаки пх и п противоположны, э. д. с. якоря двигателя совпадает по направлению с напряжением и ток якоря
так как в начале торможения Е ≈ U, сопротивление резистора R1 необходимое для ограничения тока до допустимых пределов, должно быть примерно в 2 раза больше пускового сопротивления двигателя. Механическая характеристика при этом способе торможения двигателя с параллельным возбуждением приведена на рис. 2.7 (характеристика 2).
Если двигатель предварительно работал с М1>0 и n1>0 на характеристике 1, то при торможении противовключением уравнение механической характеристики будет

При быстром реверсировании частота вращения двигателя не успеет измениться и режим торможения будет соответствовать точке с моментом М2 и частотой вращения n1 на характеристике 2.
Из рис. 2.7 видно, что при торможении противовключением в момент остановки двигателя (n = 0) момент на его валу не обращается в нуль. Поэтому после остановки двигатель может начать вращаться в обратную сторону. Во избежание этого двигатель после остановки должен быть отключен от сети.
Часто для выполнения определенной задачи требуется осуществить реверсирование двигателя постоянного тока. Термин «реверсирование» обозначает изменение направления вращения мотора агрегата. Добиться этого можно, изменив направление действия вращающего момента. Направление магнитного потока электродвигателя постоянного тока изменяется двумя способами:
- переключением обмотки возбуждения;
- переключением якоря.
В обоих случаях направление тока в якоре станет противоположным. Если переключить и якорь, и цепь направления, направление вращения магнитного поля не изменится.
Поскольку постоянная времени обмотки якоря достаточно мала, переключение якоря значительно ускоряет процесс реверсирования. Когда нет необходимости быстродействия, обычно прибегают к переключению цепи возбуждения. В моделях двигателей параллельного возбуждения в обмотке имеется большой запас энергии, поэтому в машинах с большими мощностями постоянная времени обмотки равна буквально нескольким секундам.
В моделях последовательного возбуждения реверс производится аналогично. В обмотках якоря и возбуждения имеется небольшой запас энергии, вследствие чего постоянные времени обоих узлов относительно малы.
Процесс реверсирования двигателя постоянного тока
Реверс двигателя постоянного тока с параллельным возбуждением выглядит следующим образом:
- Якорь отключается от источника питания.
- Двигатель переключается для торможения или тормозится механически.
- Якорь переключается либо в процессе торможения, либо после полного окончания торможения.
- Осуществляется пуск механизма, и двигатель начинает вращаться в противоположном направлении.
Реверсирование модели с последовательным возбуждением выполняется в той же последовательности. У моделей со смешанным возбуждением переключается или якорь, или параллельная и последовательная обмотки вместе.
Пуск и торможение двигателя постоянного тока
Способ пуска двигателя постоянного тока зависит от его мощности. Прямое включение допускается только для агрегатов малой мощности. Во всех остальных случаях используется пусковой реостат, ограничивающий ток до допустимых значений.
Пусковой реостат представляет собой разделенную на секции ленту (или провод) с высоким удельным сопротивлением. В местах перехода установлены медные плоские или кнопочные контакты, к которым присоединяются провода. При пуске двигателя сопротивление реостата должно последовательно уменьшаться – для этого рычаг переводится с одного неподвижного контакта на другой и секции выключаются.
Существует два способа торможения двигателей постоянного тока:
- Механическое торможение, применяемое при отсутствии ограничений времени и тормозного пути. При его выполнении тормозные колодки накладываются на тормозной шкив.
- Электрическое торможение, обеспечивающее точный тормозящий момент. Поскольку фиксация механизма в нужном месте невозможна, часто оно дополняется механическим.
В свою очередь, электрическое торможение может осуществляться тремя путями:
- С возвратом энергии в сеть. Кинетическая энергия при этом преобразовывается в электрическую, часть которой возвращается в сеть.
- При противовключении. Вращающийся двигатель переключается на противоположное направление вращения.
- Динамическое. При этом происходит рассеивание электрической энергии в цепи якоря.
Пуск, торможение и реверс двигателя постоянного тока должны выполняться с соблюдением технологических требований и правил техники безопасности.