При подключении
двигателя постоянного тока к сети с
напряжением U,
когда якорь неподвижен и Е
= 0, пусковой ток якоря Iяп
= Uном/Rя
= (10–30) Iном.
Такой большой
пусковой ток может разрушить коллектор,
щетки и обмотку якоря. Он также опасен
и для питающей сети.
Для ограничения
пускового тока последовательно с
обмоткой якоря включают пусковой реостат
Rп
(рис. 3.6).

Рис. 3.6
Тогда
Iяп
= Uном/(Rя
+ Rп).
Сопротивление
пускового реостата выбирают таким,
чтобы
Iяп
≤ (2 – 2,5)Iя
ном.
Rп
= (Uном/(2
– 2,5)Iя)
– Rя.
Когда якорь начинает
вращаться, ЭДС якоря растет и ток якоря
уменьшается:
Iя
= (U
– E)/(Rя
+ Rп)
= (U
– СеnФ)/(Rя
+ Rп).
Поэтому сопротивление
пускового реостата постепенно уменьшают
до нуля.
Сопротивление
реостата возбуждения Rв
при пуске следует делать минимальным,
чтобы ток возбуждения и магнитный поток
были максимальными. При этом пусковой
момент Мп
= СмIяпФп
достигнет максимального значения, в
результате чего сокращаются
продолжительность пуска и время
протекания большого пускового тока.

Рис. 3.7
В начальный момент
пуска (при n
= 0) механическая характеристика будет
иметь вид (рис. 3.7). По окончании разгона
двигателя пусковой реостат должен быть
полностью выведен, а с помощью реостата
Rв
устанавливается нужная частота вращения
в соответствии с n
= (U
– RяIя)/СеФ,
где Ф ≡ Iв.
Величина тока
двигателя Iн
в рабочем режиме зависит от нагрузки
на валу
Iн
= (Мс/Мном)Iя
ном
+ Iв
ном.
3.8. Изменение направления вращения двигателя постоянного тока (реверс)
В соответствии с
уравнением вращающего момента М = СмIяФ
знак момента зависит от знаков тока
якоря Iя
и магнитного потока Ф (тока возбуждения).
Поэтому для осуществления реверса
достаточно изменить направление тока
в одной из обмоток двигателя, либо якоря,
либо обмотки возбуждения.
3.9 Способы регулирования частоты вращения двигателя постоянного тока
В соответствии с
уравнением частоты вращения двигателя
постоянного тока n
= (U
– RяIя)/СeФ
регулирование его частоты вращения
можно производить тремя способами:
изменением сопротивления цепи якоря
Rя,
напряжения на якоре U
и магнитного потока Ф.
При регулировании
частоты вращения изменением сопротивления
цепи якоря последовательно с обмоткой
якоря включается регулировочный реостат
Rря
(пусковым реостатом для этой цепи
пользоваться нельзя, т. к. он рассчитан
только на кратковременное включение).
При этом ток якоря уменьшается, уменьшается
вращающий момент и скорость снижается.
Это вызывает уменьшение ЭДС обмотки
якоря, ток якоря и вращающий момент
двигателя восстанавливаются, пока не
наступит равенство Мдв
= Мс,
но уже при меньшей скорости. Это наглядно
иллюстрируется на искусственных
механических характеристиках (рис.
3.8), жестокость которых снижается.
Таким образом,
реостатное регулирование позволяет
изменить скорость двигателя только в
сторону уменьшения. При этом уменьшается
коэффициент полезного двигателя η ≡ n
за счет потери энергии на нагрев
регулировочного реостата ∆Ppя
= Rря![]() .
.
Поэтому
в
машинах
большой мощности
этот способ не применяется.
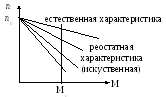
Рис. 3.8
При регулировании
изменением напряжения на обмотке якоря
скорость двигателя также будет
уменьшаться, т. к. при уменьшении
напряжения уменьшается ток якоря,
снижается вращающий момент, скорость,
а значит и ЭДС уменьшается. Ток якоря и
вращающий момент восстанавливаются,
пока не наступит равенство Мдв
= Мс,
но уже при меньшей скорости (рис. 3.9).
Жесткость
механических характеристик остается
прежней.
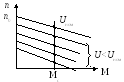
Рис. 3.9

Рис. 3.10
При регулировании
изменением магнитного потока скорость
двигателя можно изменить в сторону
увеличения, т. к. уменьшение магнитного
потока сопровождается увеличением тока
якоря гораздо в большей мере, чем
уменьшение магнитного потока, в результате
вращающий момент двигателя возрастает,
растет скорость и ЭДС, ток якоря начинает
снижаться, пока не наступит равенство
Мдв
= Мс,
но уже при большей скорости (рис. 3.10).
Жесткость
механических характеристик при уменьшении
магнитного потока несколько снижается.
Например, необходимо
построить искусственную механическую
характеристику при снижении магнитного
потока для увеличения частоты вращения
в k
раз (k
> 1), не снижая нагрузки на валу ДПТ
параллельного возбуждения, т. е.
n
= knном,
Мс
= Мном.
Уравнение
механической характеристики с
коэффициентом kф
ослабления магнитного потока, имеет
вид
knном
= Uном/СеkфФ
– МномRя/СмСе![]()
![]() .
.
где См
= Се/0,105; СеФ
= Е/nном.
Решив это квадратичное
уравнение относительно kф,
можно определить частоту вращения ДПТ
на х. х. при ослабленном потоке возбуждения
![]()
и построить характеристику
![]()
по двум точкам:
![]()
и М = 0; knном
и Мном.
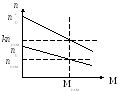
Рис. 3.11
Жесткость
механической характеристики при этом
несколько снижается.
Регулировать
частоту вращения ДПТ можно введением
последовательно включенного в цепь
обмотки якоря добавочного сопротивления
Rg.
Для ДПТ с параллельным возбуждением
величину Rg
можно определить, решая уравнение
 ,
,
![]() ,
,
где k
< 1
коэффициент снижения частоты вращения
ДПТ при неизменном моменте М = Мном.
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
Часто для выполнения определенной задачи требуется осуществить реверсирование двигателя постоянного тока. Термин «реверсирование» обозначает изменение направления вращения мотора агрегата. Добиться этого можно, изменив направление действия вращающего момента. Направление магнитного потока электродвигателя постоянного тока изменяется двумя способами:
- переключением обмотки возбуждения;
- переключением якоря.
В обоих случаях направление тока в якоре станет противоположным. Если переключить и якорь, и цепь направления, направление вращения магнитного поля не изменится.
Поскольку постоянная времени обмотки якоря достаточно мала, переключение якоря значительно ускоряет процесс реверсирования. Когда нет необходимости быстродействия, обычно прибегают к переключению цепи возбуждения. В моделях двигателей параллельного возбуждения в обмотке имеется большой запас энергии, поэтому в машинах с большими мощностями постоянная времени обмотки равна буквально нескольким секундам.
В моделях последовательного возбуждения реверс производится аналогично. В обмотках якоря и возбуждения имеется небольшой запас энергии, вследствие чего постоянные времени обоих узлов относительно малы.
Процесс реверсирования двигателя постоянного тока
Реверс двигателя постоянного тока с параллельным возбуждением выглядит следующим образом:
- Якорь отключается от источника питания.
- Двигатель переключается для торможения или тормозится механически.
- Якорь переключается либо в процессе торможения, либо после полного окончания торможения.
- Осуществляется пуск механизма, и двигатель начинает вращаться в противоположном направлении.
Реверсирование модели с последовательным возбуждением выполняется в той же последовательности. У моделей со смешанным возбуждением переключается или якорь, или параллельная и последовательная обмотки вместе.
Пуск и торможение двигателя постоянного тока
Способ пуска двигателя постоянного тока зависит от его мощности. Прямое включение допускается только для агрегатов малой мощности. Во всех остальных случаях используется пусковой реостат, ограничивающий ток до допустимых значений.
Пусковой реостат представляет собой разделенную на секции ленту (или провод) с высоким удельным сопротивлением. В местах перехода установлены медные плоские или кнопочные контакты, к которым присоединяются провода. При пуске двигателя сопротивление реостата должно последовательно уменьшаться – для этого рычаг переводится с одного неподвижного контакта на другой и секции выключаются.
Существует два способа торможения двигателей постоянного тока:
- Механическое торможение, применяемое при отсутствии ограничений времени и тормозного пути. При его выполнении тормозные колодки накладываются на тормозной шкив.
- Электрическое торможение, обеспечивающее точный тормозящий момент. Поскольку фиксация механизма в нужном месте невозможна, часто оно дополняется механическим.
В свою очередь, электрическое торможение может осуществляться тремя путями:
- С возвратом энергии в сеть. Кинетическая энергия при этом преобразовывается в электрическую, часть которой возвращается в сеть.
- При противовключении. Вращающийся двигатель переключается на противоположное направление вращения.
- Динамическое. При этом происходит рассеивание электрической энергии в цепи якоря.
Пуск, торможение и реверс двигателя постоянного тока должны выполняться с соблюдением технологических требований и правил техники безопасности.
Дата публикации: 04 марта 2013. Категория: Статьи.
При пуске двигателя в ход необходимо: 1) обеспечить надлежащий пусковой момент и условия для достижения необходимой скорости вращения; 2) предотвратить возникновение чрезмерного пускового тока, опасного для двигателя. Возможны три способа пуска двигателя в ход: 1) прямой пуск, когда цепь якоря подключается непосредственно к сети на ее полное напряжение; 2) пуск с помощью пускового реостата или пусковых сопротивлений, включаемых последовательно в цепь якоря; 3) пуск при пониженном напряжении цепи якоря.
Прямой пуск
При n = 0 также Eа = 0 и, согласно выражению (5), в статье «Общие сведения о двигателях постоянного тока»
В нормальных машинах Rа = 0,02 – 0,1, и поэтому при прямом пуске с U = Uн ток якоря недопустимо велик:
Iа = (5 – 10) Iн .
Вследствие этого прямой пуск применяется только для двигателей мощностью до нескольких сотен ватт, у которых Rа относительно велико и поэтому при пуске Iа ≤ (4 – 6) Iн, а процесс пуска длится не более 1 – 2 с.
Пуск с помощью пускового реостата или пусковых сопротивлений

Рисунок 1. Схема пуска двигателя параллельного возбуждения с помощью пускового реостата (а) и пусковых сопротивлений (б)
Для двигателей с параллельным возбуждением самым распространенным является пуск с помощью пускового реостата или пусковых сопротивлений (рисунок 1). При этом вместо выражения (5), в статье «Общие сведения о двигателях постоянного тока» имеем
а в начальный момент пуска, при n = 0,
где Rп – сопротивление пускового реостата, или пусковое сопротивление. Значение Rп подбирается так, чтобы в начальный момент пуска было Iа = (1,4 – 1,7) Iн [в малых машинах до (2,0 – 2,5) Iн].
Рассмотрим подробнее пуск двигателя параллельного возбуждения с помощью реостата (рисунок 1, а).
Перед пуском (t < 0) подвижный контакт П пускового реостата стоит на холостом контакте 0 и цепь двигателя разомкнута. В начальный момент пуска (t = 0) подвижный контакт П с помощью рукоятки переводится на контакт 1, и через якорь пойдет ток Iа, определяемый равенством (3). Цепь обмотки возбуждения ОВ подключается к неподвижной контактной дуге д, по которой скользит контакт П, чтобы во время пуска цепь возбуждения все время была под полным напряжением. Это необходимо для того, чтобы iв и Фδ при пуске были максимальными и постоянными, так как при этом, согласно выражению (8), в статье «Общие сведения о двигателях постоянного тока», при данных значениях Iа развивается наибольший момент М. С этой же целью регулировочный реостат возбуждения ставится при пуске в положение Rп.в = 0.
При положении контакта П пускового реостата на контакте 1 (t = 0) возникают токи Iа и iв, а так же момент М, и если М больше Мст, то двигатель придет во вращение и скорость n будет расти со значения n = 0 (рисунок 2). При этом в якоре будет индуктироваться электродвижущая сила (э. д. с.) Eа ∼ n и, согласно выражениям (2) и (8), представленных в статье «Общие сведения о двигателях постоянного тока», Iа и M, а также скорость нарастания n будут уменьшаться. Изменение этих величин при Mст = const происходит по экспоненциальному закону.
Рисунок 2. Зависимость Iа, M и n от времени при пуске двигателя
Когда Iа достигнет значения Iа мин = (1,1 – 1,3) Iн, контакт П пускового реостата переведется на контакт 2. Вследствие уменьшения Rп ток Iа ввиду малой индуктивности цепи якоря почти мгновенно возрастет, M также увеличится, n будет расти быстрее и в результате увеличения Eа значения Iа и M снова будут уменьшаться (рисунок 2). Подобным же образом развивается процесс пуска при последовательном переключении реостата в положения 3, 4 и 5, после чего двигатель достигнет установившегося режима работы со значениями Iа и n, определяемыми условием M = Mст [смотрите равенства (8) и (9), в статье «Общие сведения о двигателях постоянного тока»].
При пуске на холостом ходу Mст = M0. Ток Iа = Iа0 в этом случае мал и составляет обычно 3 – 8 % от Iн.
Заштрихованные на рисунке 2 ординаты представляют собой, согласно выражению (2), представленного в статье «Общие сведения о двигателях постоянного тока», значения избыточного, или динамического, момента
Mдин = M – Mст ,
под воздействием которого происходит увеличение n.
Число ступеней пускового реостата и значения их сопротивлений рассчитываются таким образом, чтобы при надлежащих интервалах времени переключение ступеней максимальные и минимальные значения Iа на всех ступенях получилось одинаковыми.
По условиям нагрева ступени реостата рассчитываются на кратковременную работу под током.
Остановка двигателя производится путем его отключения от сети с помощью рубильника или другого выключателя. Схема рисунка 1 составлена так, чтобы при отключении двигателя цепь обмотки возбуждения не размыкалась, а оставалась замкнутой через якорь. При этом ток в обмотке возбуждения после отключения двигателя уменьшается до нуля не мгновенно, а с достаточно большой постоянной времени. Благодаря этому предотвращается индуктирование в обмотке возбуждения большой э. д. с. самоиндукции, которая может повредить изоляцию этой обмотки.
Применяются также несколько видоизмененные по сравнению с рисунком 1, а схемы пусковых реостатов, без контактной дуги д. Конец цепи возбуждения при этом можно присоединить, например, к контакту 2, и при работе двигателя последовательно с обмоткой возбуждения будут включены последние ступени реостата. Поскольку их сопротивление по сравнению с Rв = rв + Rр.в мало, то это не оказывает большого влияния на работу двигателя.
Автоматизировать переключение пускового реостата неудобно. Поэтому в автоматизированных установках вместо пускового реостата используют пусковые сопротивления (рисунок 1, б), которые поочередно шунтируются контактами К1, К2, К3 автоматически работающих контакторов. Для упрощения схемы и уменьшения количества аппаратов число ступеней принимается минимальным (у двигателей малой мощности обычно 1 – 2 ступени).
Ни в коем случае нельзя допускать разрыва цепи параллельного возбуждения.
В этом случае поток возбуждения исчезает ни сразу, а поддерживается индуктируемыми в ярме вихревыми токами. Однако этот поток будет быстро уменьшаться и скорость n, согласно выражению (7), представленного в статье «Общие сведения о двигателях постоянного тока», будет сильно увеличиваться («разнос» двигателя). При этом [смотрите равенство 8, в статье «Общие сведения о двигателях постоянного тока»] ток якоря значительно возрастет и возникнет круговой огонь, вследствие чего возможно повреждение машины, и поэтому, в частности, в цепях возбуждения не ставят предохранителей и выключателей.
Пуск двигателей постоянного тока
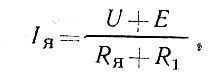
Ток якоря двигателей постоянного тока определяется уравнением
где Rд — внутреннее сопротивление двигателя.
При пуске двигателя, когда он неподвижен, т. е. ω = 0, э.д. с. Е
равна нулю.
Поэтому пусковой ток двигателя
Внутреннее сопротивление двигателей R
дочень мало, поэтому включение двигателя на полное напряжение сети вызывает большой бросок тока, превосходящий номинальный ток во много раз.
Для ограничения пускового тока необходимо последовательно с обмоткой якоря включить пусковой реостат или изменять подводимое к двигателю напряжение от нуля до номинального.
При реостатном пуске пусковой ток определяется согласно уравнению
Где Rп — сопротивление пускового реостата.

По мере увеличения скорости вращения якоря двигателя при пуске будет расти э. д. с. якоря. Ток в этом случае будет равен
С увеличением скорости вращения якоря, а следовательно с увеличением э. д. с, будет уменьшаться ток якоря и вращающий момент. Для поддержания величины пускового тока и пускового момента в необходимых для пуска пределах нужно уменьшать величину сопротивления пускового реостата. Таким образом, по мере разгона двигателя сопротивление пускового реостата автоматически или вручную уменьшается.
Диаграммы пуска двигателей постоянного тока параллельного и последовательного возбуждения приведены на рис. 5.1.
Величину момента Mi,
соответствующего полному сопротивлению реостата при неподвижном двигателе, называют максимальным пусковым моментом. Величину момента
М2,
при котором происходит переключение реостата, т. е. переход на следующую механическую характеристику, называют переключающим моментом.
Переключающий момент принимается больше момента статического сопротивления, т. е. М2>МС-
Кроме пусковых ступеней, реостат имеет предварительную ступень, на которой пусковой момент меньше момента статического сопротивления, т. е. Мпред<�Мс. На этой ступени реостата якорь двигателя, повернувшись на некоторый угол, необходимый для кинематической подтяжки привода, остается неподвижным. При этом шестерни редуктора войдут в зацепление, натягивается канат и т. д. Благодаря наличию предварительной ступени пуск привода происходит плавно, без рывков. Согласно пусковой диаграмме пуск двигателя проходит следующие этапы (см. рис. 5.1).
На участке характеристики 0
—/ пусковой момент увеличивается от нуля до Мпред. В точке 1 двигатель еще неподвижен, но произошла кинематическая подтяжка всей системы привода.
На участке 1
—
2
пусковой момент увеличивается от
Мпреде
до М1 На участке
2
—
3
увеличивается угловая скорость до ωi и уменьшается пусковой момент от
М
1до
М2-
В точке 3
происходит выключение одной секции реостата. Сопротивление его уменьшается и разгон двигателя происходит по прямой
4
—
5
от скорости ω1 до скорости ω2 Момент снова уменьшается до
М2.
В точке 9
(см. рис. 5.1,
а)
и точке 7 (см. рис. 5.1, б) реостат полностью зашунтирован. Двигатель разгоняется на естественной характеристике
10
—11 (см. рис. 5.1,
а)
и
8
—
9
(см. рис. 5.1,
б).
В точках
11
и
9
наступает установившийся режим работы двигателя при
М=МС
и скорости ωс. На этом пуск двигателя заканчивается. Этот способ пуска отличается сравнительно большими потерями энергии в реостате.
Значительно экономичнее получается пуск двигателей при изменении напряжения от нуля до номинального. Но для этого необходимо применять специальные системы привода, например систему генератор — двигатель (Г—Д), тиристорный преобразователь— двигатель (ТП—Д) и т. д. Эти системы привода будут подробнее рассмотрены ниже.
Для уменьшения потерь электроэнергии при пуске двигателей последовательного возбуждения, установленных на электровозах, применяют последовательно-параллельное соединение двигателей. При этом на зажимах двигателей напряжение изменяется скачкообразно. Так, например, при двух двигателях напряжение может быть равно 0,5 UH0M
и
UH0M,
при четырех двигателях — 0,25 Uном, 0,5
UH0M
и
UH0M.
Такое соединение двигателей дает возможность уменьшить потери энергии в реостатах при пуске.
5.3. Пуск двигателей переменного тока
Пуск асинхронных двигателей с фазным ротором при номинальном напряжении и номинальной частоте осуществляется при помощи пускового реостата, включенного в цепь ротора.
Диаграмма пуска (рис. 5.2) получается подобной диаграмме пуска двигателя постоянного тока параллельного возбуждения. По мере увеличения скорости вращения ротора сопротивление реостата уменьшается (автоматически или вручную). По пусковой диаграмме пуск двигателя проходит следующие этапы:
на участке 0
—1 момент увеличивается от 0 до Мпред, происходит кинематическая подтяжка всей системы привода;
на участке 1—2
момент увеличивается от
Мпрел
до
М
1(предварительная секция- rпред зашунтирована);
на участке 2
—
3
увеличивается скорость вращения ротора от нуля до ω1 и уменьшается момент от
М
1до М2;
на участке 3
—
4
происходит разгон двигателя на третьей характеристике от ω1 до ω2
Аналогично происходит пуск и на других ступенях реостата. От точки 8
до точки
9
происходит разгон двигателя на естественной характеристике.
Пуск асинхронных двигателей с короткозамкнутым ротором осуществляется прямым включением в сеть.
Пуск непосредственным включением в сеть на полное напряжение прост, обеспечивает полную величину пускового момента, но связан со значительными пусковыми токами.
Пуск синхронных двигателей. В настоящее время синхронные двигатели изготовляют только с асинхронным пуском.
При асинхронном пуске синхронного двигателя принципиальные схемы включения обмотки статора аналогичны схемам включения асинхронного двигателя с короткозамкнутым ротором. При асинхронном пуске до подачи напряжения в обмотку возбуждения последняя должна быть замкнута на разрядное сопротивление.
При пуске синхронного двигателя необходимо выполнить два условия:
а) пусковой (асинхронный) момент Мпуск должен быть больше момента статического сопротивления Мс;
б) входной (подсинхронный) момент вращения Л1вх, т. е. момент при скольжении s = 0,05, должен быть больше статического момента сопротивления при том же скольжении. Данные о пусковом и входном моментах двигателя приводятся в заводских каталогах.
Тормозные режимы двигателей
Двигатели постоянного тока и асинхронные двигатели трехфазного тока позволяют применять три вида электрического торможения: генераторное торможение с рекуперацией энергии в сеть, динамическое торможение и торможение противовключением.
Двигатели постоянного тока параллельного возбуждения. На рис. 5.3 представлены схемы включения двигателя, а на рис. 5.4 — механические характеристики в тормозных режимах.
Генераторное торможение с рекуперацией энергиив сеть(рис. 5.3, а)
может быть только при скорости вращения якоря, большей скорости идеального холостого хода, т. е. ω>ω0. В этом случае
Е> U
и величина тормозного тока определяется уравнением
из которого видно, что направление тока меняется на обратное, т. е. ток поступает от двигателя в сеть. Этот режим работы применяется для торможения при спуске груза (подъемные машины, краны и т. п.), когда груз, опускаясь, может вращать якорь со скоростью ω>ω0. Точка 2
механической характеристики (см. рис. 5.4) соответствует этому режиму работы. Очевидно, этот вид торможения можно применять только для поддержания скорости на определенном уровне.
Динамическое торможение(рис. 5.3, б)
можно применять при любой скорости вращения якоря двигателя, отличной от нуля. Якорь двигателя при динамическом торможении отключается от сети и замыкается на тормозное сопротивление
RAnn-
Обмотка возбуждения обычно включается в сеть постоянного тока для создания неизменного магнитного потока двигателя.
Величина тока якоря при динамическом торможении определяется выражением
Участок 3
—
0
механической характеристики (рис. 5.4) соответствует динамическому торможению.
Так как Е
пропорциональна скорости вращения якоря, то при малых скоростях динамическое торможение малоэффективно.
Торможение противовключением(рис. 5.3, в)
возможно при всех значениях скорости, вплоть до полной остановки двигателя.
При противовключении двигатель вращается в обратную сторону. При этом э. д. с. Е
действует согласно с приложенным напряжением (если изменить направление тока в обмотке возбуждения). Ток якорной цепи двигателя определится по выражжению
Подобный режим работы может быть осуществлен только при введении в цепь якоря достаточно большого сопротивления с целью ограничения тока якоря. Этому режиму работы соответствует участок 4
—
-5
характеристики на рис. 5.4.
Двигатели постоянного тока последовательного возбуждения могут иметь два режима торможения: динамическое торможение и торможение противовключением. Генераторное торможение с рекуперацией энергии в сеть при обычной схеме включения двигателя невозможно, так как двигатель не имеет скорости идеального холостого хода. Этот режим торможения возможен, если обмотку возбуждения подключить к независимому источнику тока.
Схемы включения двигателя приведены на рис. 5.5, а механические характеристики — на рис. 5.6.
Динамическое торможениеможно применять при любой скорости, однако при малых скоростях эффективность торможения резко снижается. При этом режиме работы двигатель может быть включен по схемам, приведенным на рис. 5.5, а
и
б.
В первой схеме двигатель отключается от сети и замыкается на тормозное сопротивление. Концы обмотки возбуждения следует поменять местами с целью предотвращения размагничивания двигателя. Вторая схема широкого применения не получила, так как в тормозном сопротивлении, включенном последовательно с обмоткой возбуждения, получаются большие потери электроэнергии.
В остальном этот режим протекает так же, как и в двигателе параллельного возбуждения. Участок 2
—
0
механической характеристики соответствует динамическому торможению.

Торможение противовключением(рис. 5.5, в)
осуществляется и протекает точно так же, как и в двигателе параллельного возбуждения. Участок
3
—
4
механической характеристики (рис. 5.6) соответствует торможению противовключением
Асинхронные двигатели трехфазного тока.
В асинхронных двигателях возможны три тормозных режима: торможение с рекуперацией энергии в сеть; торможение противовключением и динамическое торможение.
На рис. 5.7 приведены схемы включения двигателя, а на рис. 5.8 механические характеристики при тормозных режимах.
При торможении с рекуперацией энергии в сеть (рис. 5.7, а)
направление вращения вращающегося магнитного потока статора совпадает с направлением вращения ротора. Скорость вращения ротора больше скорости вращения магнитного потока, т. е. (о>со0- Механическая энергия, подводимая к валу ротора извне (например, создаваемая опускаемым грузом), преобразуется в электрическую и отдается в сеть. Применяется этот режим торможения для поддержания постоянной скорости при опускании груза в подъемных установках. На механических характеристиках (см. рис. 5.8) этому режиму работы соответствует точка
2.
При торможении противовключениемротор двигателя вращается в сторону, противоположную вращению магнитного потока статора. Этот режим работы может быть получен путем реверсирования двигателя на ходу (рис. 5.7, б). Ротор под действием запасенной кинетической энергии продолжает вращаться впрежнем направлении, а поле статора изменяет свое направление вращения.
Режиму торможения противовключением соответствуют участки механических характеристик (см. рис. 5.8) 3
—
4
для двигателя с короткозамкнутым ротором и
3′
—
4′(
на реостатной характеристике двигателя с фазовым ротором) соответствуют динамическому торможению.

Динамическое торможениеасинхронного двигателя осуществляется подключением обмотки статора к источнику постоянного тока. Обмотка ротора двигателя с фазным ротором замыкается на сопротивление (рис. 5.7, в). Машина работает как синхронный генератор с неподвижными полюсами. Части механических характеристик (рис. 5.8) 5—0
(для двигателя с короткозамкнутым ротором) и 5’—
0
(на реостатной характеристике двигателя с фазным ротором) соответствуют динамическому торможению.
Предыдущая4Следующая
Что способствует осуществлению желаний? Стопроцентная, непоколебимая уверенность в своем…
ЧТО ПРОИСХОДИТ, КОГДА МЫ ССОРИМСЯ Не понимая различий, существующих между мужчинами и женщинами, очень легко довести дело до ссоры…
ЧТО ПРОИСХОДИТ ВО ВЗРОСЛОЙ ЖИЗНИ? Если вы все еще «неправильно» связаны с матерью, вы избегаете отделения и независимого взрослого существования…
Что будет с Землей, если ось ее сместится на 6666 км? Что будет с Землей? — задался я вопросом…
Не нашли то, что искали? Воспользуйтесь поиском гугл на сайте:
Пуск при пониженном напряжении цепи якоря
Ограничение пускового тока достигается также в случае питания цепи якоря при пуске от отдельного источника тока с регулируемым напряжением (отдельный генератор постоянного тока, управляемый выпрямитель). Обмотку возбуждения при этом необходимо питать от другого источника, с полным напряжением, чтобы иметь при пуске полный ток iв. Этот способ пуска применяют чаще всего для мощных двигателей, притом в сочетании с регулированием скорости вращения.
Пуск двигателей последовательного и смешанного возбуждения производится аналогичным образом. Схема пуска двигателя смешанного возбуждения ничем не отличается от схемы пуска двигателя параллельного возбуждения (рисунок 1), а схема пуска двигателя последовательного возбуждения упрощается за счет исключения параллельной цепи возбуждения.
Для изменения направления вращения (реверсирования) двигателя необходимо изменить направление тока в якоре (вместе с добавочными полюсами и компенсационной обмоткой) или в обмотке (обмотках) возбуждения.
Источник: Вольдек А. И., «Электрические машины. Учебник для технических учебных заведений» – 3-е издание, переработанное – Ленинград: Энергия, 1978 – 832с.
Способы регулирования частоты вращения якорей тяговых двигателей постоянного тока и реостатный пуск
Способы регулирования частоты вращения. Частоту вращения якорей тяговых двигателей можно регулировать, изменяя напряжение і/л на зажимах двигателя или магнитный поток Ф, т. е. коэффициент возбуждения р. Напряжение ?/д изменяют с помощью пускового реостата, включенного последовательно с двигателями, и тиристорных преобразователей, а также применением различных схем соединений тяговых двигателей.
Реостатный пуск. В момент пуска и разгона электровоза или моторного вагона электропоезда для увеличения напряжения на зажимах двигателя и поддержания необходимых тока и силы тяги выводят ступенями пусковой реостат, т. е. осуществляют реостатный пуск. Для длительной езды под током применяют различные соединения тяговых двигателей и ступени ослабления возбуждения. Скоростные характеристики v(I), соответствующие различным схемам соединения двигателей при выведенном пусковом реостате и коэффициентам возбуждения, называют экономическими (ходовыми)’, характеристики, соответствующие работе на различных ступенях реостатного пуска, — реостатными.
В период пуска и разгона поезда якоря тяговых двигателей должны развивать частоту вращения от нуля до значения, соответствующего выходу на без-реостатную характеристику. На электровозах, где пусковой режим машинист изменяет в широкик пределах сообразно с весом поезда, профилем пути и условиями сцепления, чаше всего применяют неавтоматический ступенчатый реостатный пуск. Плавное изменение сопро тивления пускового реостата, рассчитанного на большой ток, принципиально возможно при импульсном регулировании его тиристорным преобразователем.
В процессе пуска почти всегда реализуется максимальная по сцеплению сила тяги. Отклонение пускового тока /п и силы тяги от средних значений при ступенчатом реостатном пуске характеризуют соответственно коэффициентами неравномерности пуска по току и силе тяги кн/ и киР.
Чтобы пуск электровоза или электропоезда происходил без боксования, для любой позиции должно быть соблюдено условие Ктах/П < фк (здесь Ктах — максимальная сила тяги по условиям сцепления движущего колеса с рельсом; П — нагрузка на рельсы от колесной пары; фк — расчетный коэффициент сцепления, который выбирают согласно Правилам тяговых расчетов. Максимальная возможная по условиям сцепления сила тяги тем больше, чем меньше коэффициент неравномерности.
При различных пределах отклонения тока для разных позиций коэффициенты К„1 И к„р являются переменными и определяются отдельно. В случае уменьшения к„I снижается вероятность нарушения сцепления, поскольку сила тяги нарастает более мелкими ступенями. Для электровозов принимают кн/ не более 0,07 — 0,08, что соответствует при пуске колебаниям тока ±9-10%. На некоторых современных электровозах колебания пускового тока составляют ±4%. Для моторных вагонов электропоездов коэффициент к„1 выбирают в зависимости от ускорения а, полагая ас_кн/ ж 0,075 -4—4- 0,085 м/с2.
Коэффициент к„/> обычно в 1,2-1,25 раза больше коэффициента кн1. Полученное значение Ктах для электровозов проверяют также по перегрузочной способности двигателя. Наибольшее значение тока при пуске не должно превышать ^тах = ^пэ^ч (здесь Кпэ = 1,4 -г- 1,6 коэффициент эксплуатационной перегрузки для электровозов с неавтоматическим пуском).
С уменьшением числа ступеней упрощается аппаратура, но вместе с тем увеличиваются колебания тока при переходе с позиции на позицию, а это приводит к уменьшению использования сцепного веса при пуске и торможении и резким толчкам тягового усилия. Поэтому в каждом конкретном случае стремятся принять решение, удовлетворяющее в необходимой степени обоим требованиям. Каждому соединению двигателей соответствует несколько кривых, характеризующих зависимость скорости движения и от тока I при различных сопротивлениях г. Совокупность таких кривых с указанием перехода с одной кривой (характеристики) на другую при максимальном токе называют пусковой диаграммой.
Для ограничения начального ускорения во время пуска электровоза с низкими скоростями при маневрах, а также для плавного натяжения упряжных приборов при трогании локомотива с составом на первом соединении тяговых двигателей, кроме позиций, полученных из условий пуска с расчетными пределами тока, вводят еще маневровые позиции, при которых пусковое сопротивление больше сопротивления, соответствующего первой пусковой позиции. Число маневровых позиций для электровозов обычно выбирают от четырех до шести.
Первую маневровую позицию рассчитывают по начальному ускорению, равному 0,3-0,5 м/с2 при пуске электровоза без состава на площадке. Для электропоездов с ускорением 0,7-1,0 м/с2 при автоматическом пуске обычно предусматривают одну маневровую позицию, сопротивление которой рассчитывают исходя из начального ускорения 0,5-0,6 м/с2 при о = 0.
При малом пусковом токе переход на первую позицию второго соединения тяговых двигателей может сопровождаться значительным броском тока, для уменьшения которого на втором и последующих соединениях двигателей при ручном пуске добавляют две или три дополнительные реостатные позиции на электро возах и одну или две на моторных вагонах аналогично маневровым позициям на первом соединении
Для определения дополнительных ступеней, предшествующих первой позиции второго соединения двигателей, находят скорость, при которой бросок тока при переходе с предыдущей автоматической характеристики на первую реостатную следующего соединения был бы равен разности максимального и минимального пусковых токов.
⇐Классификация цепей и требования, предъявляемые к электрическим схемам | Электровозы и электропоезда | Регулирование частоты вращения якорей тяговых двигателей постоянного тока⇒
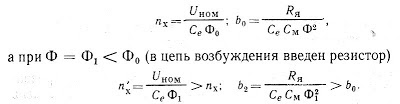
Регулирование частоты вращения. Частоту вращения электродвигателей постоянного тока регулируют: введением резисторов в цепь якоря двигателя; изменением магнитного потока; изменением напряжения, приложенного к якорю электродвигателя.
В зависимости от способа регулирования частоты вращения получаются различные искусственные механические характеристики.
При введении резисторов в цепь якоря у двигателей с независимым и параллельным возбуждением магнитный поток не изменяется, следовательно, остается постоянной частота вращения идеального холостого хода nx, но значение сопротивления вводимого резистора оказывает большое влияние на наклон механической характеристики, так как возрастает угловой коэффициент:
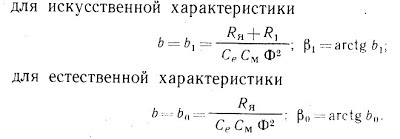
Поэтому искусственная механическая характеристика двигателей с независимым и параллельным возбуждением представляет собой прямую линию 1 (рис. 2.3), проходящую через одну точку nx с естественной характеристикой 0 и наклоном β1, определяемым значением сопротивления вводимого резистора.

Рис. 2.3. Механические характеристики электродвигателя с параллельным возбуждением
Изменение сопротивления цепи якоря для двигателя с последовательным возбуждением приведет к смещению характеристики вниз в сторону уменьшения n.
Магнитный поток электродвигателей можно изменить введением дополнительного резистора в цепь обмотки возбуждения, причем уменьшаются ток возбуждения и магнитный поток двигателя.
Изменение магнитного потока приводит к увеличению частоты вращения идеального холостого хода и изменению наклона механической характеристики у двигателей с независимым, параллельным и смешанным возбуждением.
Действительно, если Ф = Ф0, то для естественной характеристики
Таким образом, искусственная механическая характеристика, полученная при введении резистора в цепь обмотки возбуждения двигателя, располагается выше естественной (характеристика 2), частота вращения идеального холостого хода и наклон характеристики увеличиваются.
Изменение питающего цепь якоря напряжения при неизменном напряжении в цепи независимой обмотки возбуждения приводит у двигателей с независимым возбуждением к изменению частоты вращения идеального холостого хода при неизменном наклоне характеристики.

Следовательно, искусственная характеристика расположится ниже естественной и будет параллельна ей (характеристика 3). У двигателя, имеющего смешанное возбуждение, искусственная характеристика также будет ниже естественной.
Анализируя полученные механические характеристики электродвигателей постоянного тока, можно установить, что при одном и том же моменте на валу электродвигателя частота вращения его на разных характеристиках будет различной. Поэтому частоту вращения электродвигателей регулируют способами, используемыми для получения искусственных характеристик. Различают параметрическое и импульсное регулирование.
При параметрическом способе изменяется какой-либо параметр, который далее остается неизменным. Импульсное регулирование характеризуется периодическим ступенчатым изменением какого-либо параметра с определенной частотой.
Каждому из параметрических способов присущи свои особенности, определившие область их применения.
Введение резистора в цепь якоря приводит к уменьшению частоты вращения, причем эффективность регулирования тем больше, чем больше нагружен двигатель. Способ не экономичен из-за больших потерь энергии в дополнительном резисторе, но все же используется вследствие его простоты.
Введение резистора в цепь обмотки возбуждения приводит к увеличению частоты вращения. Этот способ экономичен, так как ток возбуждения составляет 2—5 % тока якоря и потери в резисторе невелики. Однако этот способ не позволяет получить частоту вращения двигателя меньше номинальной.
Изменение приложенного к якорю напряжения — наиболее удачный способ регулирования. Он экономичен и допускает регулирование частоты вращения в достаточно широких пределах при любых значениях нагрузки, но требует автономных источников питания с широким диапазоном изменения напряжения. Поэтому его целесообразно применять для электроприводов с частыми пусками и большим диапазоном регулирования частоты вращения электродвигателя (рулевые электроприводы, электроприводы оперативных лебедок земснарядов, гребные электрические установки и т.п.). Автономным источником питания может служить генератор постоянного тока с независимым возбуждением. Напряжение можно регулировать с помощью управляемого выпрямителя или магнитного усилителя.
Из импульсных способов регулирования двигателей постоянного тока наиболее широкое распространение получил способ изменения времени включения приложенного к якорю напряжения при постоянной частоте включения. Этот способ называется широтно-импульсным. Среднее значение приложенного к якорю напряжения

Изменяя tp при постоянном Т (изменяя скважность), регулируют среднее значение приложенного к якорю двигателя напряжения и частоту вращения электродвигателя. Частоту включения обычно выбирают в пределах 500—1000 Гц. Возможен другой способ импульсного регулирования, когда время включения tр остается постоянным, а период Т изменяется. Такой способ принято называть частотно-импульсным.
Импульсное регулирование электродвигателей постоянного тока является перспективным для тех электроприводов, для которых применяется регулирование изменением приложенного к якорю напряжения. Основным недостатком этого способа является большое число включений, приводящих к появлению больших переходных токов и требующих специальной аппаратуры.
Пуск электродвигателей постоянного тока. Как известно из курса электротехники, вращающий момент электродвигателя при пуске

Пусковой ток может значительно превышать номинальный ток двигателя из-за отсутствия противо-э. д. с. в момент пуска.
При пуске все дополнительные резисторы в цепях независимой и параллельной обмоток возбуждения должны быть введены и последовательная обмотка не шунтирована.
Отечественная промышленность изготовляет электродвигатели, пусковой ток которых по условиям коммутации должен удовлетворять неравенству Iя.п≤2,5Iя.ном.
При этом наибольший пусковой момент двигателей с независимым и параллельным возбуждением при Ф = const будет также Мп≤2,5Мном.
При таком же пусковом токе у двигателей со смешанным и последовательным возбуждением пусковой момент будет несколько больше вследствие увеличения магнитного потока, создаваемого последователь ной обмоткой, по сравнению с номинальным.
По мере увеличения частоты вращения двигателя растет противо- э.д.с., что приводит к уменьшению тока якоря
следовательно, будет уменьшаться вращающий момент двигателя.
Для обеспечения наиболее быстрого разгона двигателя необходимо поддерживать при пуске момент и ток якоря в определенных пределах.
Различают следующие способы пуска электродвигателей постоянного тока: прямой, с ограничением пусковых токов вследствие изменения сопротивления цепи якоря и импульсный.
Прямой пуск осуществляется непосредственно включением двигателя на полное напряжение сети при отсутствии добавочных элементов в цепях якоря и возбуждения. Преимуществами этого способа являются его простота и отсутствие дополнительной пусковой аппаратуры, недостатком — большой ток в цепи якоря в первоначальный момент пуска, что вызывает искрение на коллекторе, возникновение значительного момента на валу двигателя и колебания напряжения в судовой сети. Прямой пуск применяют для двигателей постоянного тока мощностью не более 1,5 кВт.
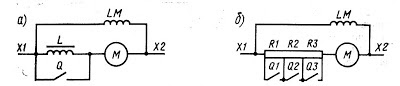
Рис. 2.4. Пуск двигателя постоянного тока
Параметрический пуск основан на предварительном изменении какого-либо параметра двигателя, ограничивающего пусковой ток, с последующим его приведением в процессе пуска к значению соответствующему номинальному режиму.
Для двигателей небольшой мощности применяют пуск с помощью реактора L, включенного последовательно в цепь якоря двигателя (рис. 2.4, а). При правильно подобранной индуктивности реактора время нарастания тока, определяемое электромагнитной постоянной времени электрической цепи,
T = (Lя+L)/Rя
соизмеримо с временем разгона электродвигателя, что значительно снижает пик пускового тока. Недостатками этого способа являются большие габаритные размеры и масса пускового реактора.
Наибольшее применение получил реостатный способ пуска, при этом способе в цепь якоря для ограничения пусковых токов включают дополнительный реостат (рис. 2.4, б), состоящий из трех-четырех резисторов. По мере разгона электродвигателя секции реостата поочередно закорачивают.
В некоторых случаях пользуются способом пуска, основанным на ступенчатом или плавном изменении напряжения, приложенного к якорю двигателя, от нуля до номинального значения. Этот способ возможен при питании якоря электродвигателя от отдельного источника с регулируемым напряжением. В качестве такого источника могут быть использованы генератор постоянного тока с независимым возбуждением, регулируемый трансформатор с выпрямителем, трансформатор с управляемым выпрямителем.
При импульсном пуске, так же как и при импульсном регулировании частоты вращения, может быть использован как широтно-импульсный, так и частотно-импульсный способ. В том и другом случае пуск осуществляется изменением скважности от нуля до номинального значения.
Реверсирование электродвигателей постоянного тока. Реверсирование— изменение направления вращения на противоположное. Для реверсирования необходимо изменить направление вращающего момента М = СмФIя, что возможно осуществить изменением направления тока в якоре электродвигателя или изменением направления магнитного потока путем изменения направления тока в обмотках возбуждения.
Для двигателей с независимым и параллельным возбуждением предпочтительнее первый способ по сравнению со вторым по сле-дующим причинам:
во-первых, при размыкании обмотки возбуждения, предшествующем ее переключению, возникает значительная э. д. с. самоиндукции
затрудняющая процесс коммутации и увеличивающая вероятность пробоя изоляции;
во-вторых, при реверсировании двигатель сначала необходимо остановить, а затем он начинает вращаться в обратную сторону. Но уменьшение магнитного потока вызовет не уменьшение, а увеличение частоты вращения.
Для двигателей со смешанным возбуждением реверсирование изменением направления магнитного потока еще более затруднено по сравнению с двигателем с параллельным возбуждением, так как у него необходимо переключать две обмотки возбуждения. Для двигателей с последовательным возбуждением оба способа равноценны.
Торможение электродвигателей постоянного тока. При режиме торможения электромагнитный момент на валу электродвигателя направлен в сторону, противоположную направлению вращения.
Режимы торможения используются, когда необходимо: остановить электропривод, вращающийся по инерции; остановить электропривод, вращающийся под действием момента, создаваемого рабочей машиной, например: под действием опускаемого подъемным краном груза; замедлить вращение электропривода при воздействии момента, создаваемого рабочей машиной.
Чтобы осуществить режим торможения электродвигателя, нужно изменить направление вращающего момента на его валу, при этом двигатель переходит в генераторный режим работы. В зависимости от использования энергии различают три вида торможения: рекуперативное, динамическое и противовключением. Рекуперативное торможение сопровождается возвратом энергии в питающую сеть. При динамическом торможении и торможении противовключением энергия превращается в тепловую в элементах цепи якоря двигателя.
Торможение с отдачей энергии в сеть, или рекуперативное торможение, наступает, тогда, когда электродвигатель под действием момента рабочей машины (идущий под уклон железнодорожный состав, опускающийся на подъемном кране груз) разгоняется до частоты вращения, превышающей частоту вращения идеального холостого хода. В этом случае э.д.с. якоря будет больше напряжения в сети, ток изменит свое направление и машина будет работать в режиме генератора, отдавая энергию в сеть. При этом направление вращения двигателя не изменится. Механическая характеристика двигателя с параллельным возбуждением О (рис. 2.5) при торможении с отдачей энергии в сеть будет являться продолжением характеристики

Рис. 2.5. Механические характеристики двигателя постоянного тока при рекуперативном торможении
в область отрицательных моментов. Область режима торможения обозначена цифрой II, область двигательного режима — цифрой I.
У двигателей со смешанным возбуждением при переходе в режим торможения ток в последовательной обмотке меняет свое направление, и поэтому она противодействует параллельной обмотке, размагничивая машину и уменьшая момент торможения (штриховая линия). Во избежание этого последовательную обмотку закорачивают или отключают (характеристика I).
Двигатели с последовательным возбуждением не могут работать в режиме торможения с отдачей энергии в сеть, так как с увеличением частоты вращения ток двигателя уменьшается и он размагничивается. Его э.д.с. никогда не может быть больше напряжения в сети.
Динамическое торможение осуществляют отключением якоря от сети и замыканием его на резистор. Различают два вида динамического торможения: с независимым возбуждением и с самовозбуждением.

Рис. 2.6. Схемы включения и механические характеристики двигателей при динамическом торможении
При торможении двигателей с независимым и параллельным возбуждением применяют торможение с независимым возбуждением (рис. 2.6, а).
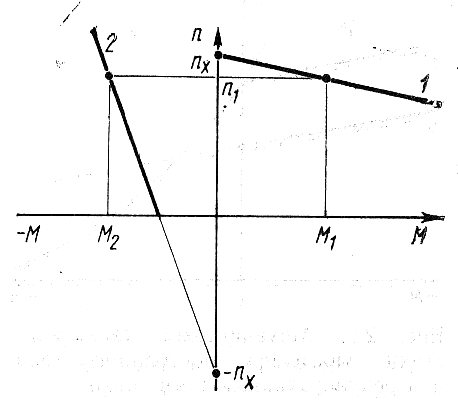
Рис. 2.7. Механическая характеристика двигателя постоянного тока с параллельным возбуждением при торможении противовключением
В этом случае якорь Двигателя отключается от питающей сети и включается на тормозной резистор R1, обмотка возбуждения остается включенной в сеть.
У двигателя со смешанным возбуждением последовательная обмотка отключается или закорачивается.
Торможение двигателя с последовательным возбуждением при питании обмотки возбуждения от сети (рис. 2.6, б) более эффективно, чем торможение с самовозбуждением (рис. 2.6, в), однако для ограничения тока в обмотке необходимо ее подключать через дополнительный резистор R2, мощность рассеяния которого должна равняться мощности электродвигателя
Уравнение механической характеристики при динамическом торможении (при U = 0)
При Ф = const (независимое возбуждение) оно представляет собой уравнение прямой линии.
При самовозбуждении в связи с изменением магнитного потока характеристика искривляется, а при некотором значении частоты вращения самовозбуждение и торможение двигателя прекращаются.
На рис. 2.6, г показаны механические характеристики для динамического торможения: 0 — для торможения с независимым возбуждением; 1 — для торможения с самовозбуждением. Штриховой линией показан участок, на котором торможение прекращается.
Торможение противовключением производится быстрым реверсированием двигателя по ходу, когда якорь по инерции продолжает вращаться в одном направлении, а обмотки включаются на противоположное. При этих режимах знаки пх и п противоположны, э. д. с. якоря двигателя совпадает по направлению с напряжением и ток якоря
так как в начале торможения Е ≈ U, сопротивление резистора R1 необходимое для ограничения тока до допустимых пределов, должно быть примерно в 2 раза больше пускового сопротивления двигателя. Механическая характеристика при этом способе торможения двигателя с параллельным возбуждением приведена на рис. 2.7 (характеристика 2).
Если двигатель предварительно работал с М1>0 и n1>0 на характеристике 1, то при торможении противовключением уравнение механической характеристики будет

При быстром реверсировании частота вращения двигателя не успеет измениться и режим торможения будет соответствовать точке с моментом М2 и частотой вращения n1 на характеристике 2.
Из рис. 2.7 видно, что при торможении противовключением в момент остановки двигателя (n = 0) момент на его валу не обращается в нуль. Поэтому после остановки двигатель может начать вращаться в обратную сторону. Во избежание этого двигатель после остановки должен быть отключен от сети.
При пуске двигателя в ход необходимо: 1) обеспечить надлежащий пусковой момент и условия для достижения необходимой скорости вращения; 2) предотвратить возникновение чрезмерного пускового тока, опасного для двигателя.
Возможны три способа пуска двигателя в ход: 1) прямой пуск, когда цепь якоря подключается непосредственно к сети на ее полное напряжение; 2) пуск с помощью пускового реостата или пусковых сопротивлений, включаемых последовательно в цепь якоря; 3) пуск при пониженном напряжении цепи якоря.
Прямой пуск
При n = 0 также Eа = 0 и, согласно выражению (5), в статье «Общие сведения о двигателях постоянного тока»
В нормальных машинах Rа = 0,02 – 0,1, и поэтому при прямом пуске с U = Uн ток якоря недопустимо велик:
Iа = (5 – 10) Iн .
Вследствие этого прямой пуск применяется только для двигателей мощностью до нескольких сотен ватт, у которых Rа относительно велико и поэтому при пуске Iа ≤ (4 – 6) Iн, а процесс пуска длится не более 1 – 2 с.
Пуск с помощью пускового реостата или пусковых сопротивлений

Рисунок 1. Схема пуска двигателя параллельного возбуждения с помощью пускового реостата (а) и пусковых сопротивлений (б)
Для двигателей с параллельным возбуждением самым распространенным является пуск с помощью пускового реостата или пусковых сопротивлений (рисунок 1).
При этом вместо выражения (5), в статье «Общие сведения о двигателях постоянного тока» имеем
| (2) |
а в начальный момент пуска, при n = 0,
| (3) |
где Rп – сопротивление пускового реостата, или пусковое сопротивление. Значение Rп подбирается так, чтобы в начальный момент пуска было Iа = (1,4 – 1,7) Iн [в малых машинах до (2,0 – 2,5) Iн].
Рассмотрим подробнее пуск двигателя параллельного возбуждения с помощью реостата (рисунок 1, а).
Перед пуском (t < 0) подвижный контакт П пускового реостата стоит на холостом контакте 0 и цепь двигателя разомкнута. В начальный момент пуска (t = 0) подвижный контакт П с помощью рукоятки переводится на контакт 1, и через якорь пойдет ток Iа, определяемый равенством (3). Цепь обмотки возбуждения ОВ подключается к неподвижной контактной дуге д, по которой скользит контакт П, чтобы во время пуска цепь возбуждения все время была под полным напряжением. Это необходимо для того, чтобы iв и Фδ при пуске были максимальными и постоянными, так как при этом, согласно выражению (8), в статье «Общие сведения о двигателях постоянного тока», при данных значениях Iа развивается наибольший момент М. С этой же целью регулировочный реостат возбуждения ставится при пуске в положение Rп.в = 0.
При положении контакта П пускового реостата на контакте 1 (t = 0) возникают токи Iа и iв, а так же момент М, и если М больше Мст, то двигатель придет во вращение и скорость n будет расти со значения n = 0 (рисунок 2). При этом в якоре будет индуктироваться электродвижущая сила (э. д. с.) Eа ∼ n и, согласно выражениям (2) и (8), представленных в статье «Общие сведения о двигателях постоянного тока», Iа и M, а также скорость нарастания n будут уменьшаться. Изменение этих величин при Mст = const происходит по экспоненциальному закону.
 |
| Рисунок 2. Зависимость Iа, M и n от времени при пуске двигателя |
Когда Iа достигнет значения Iа мин = (1,1 – 1,3) Iн, контакт П пускового реостата переведется на контакт 2. Вследствие уменьшения Rп ток Iа ввиду малой индуктивности цепи якоря почти мгновенно возрастет, M также увеличится, n будет расти быстрее и в результате увеличения Eа значения Iа и M снова будут уменьшаться (рисунок 2). Подобным же образом развивается процесс пуска при последовательном переключении реостата в положения 3, 4 и 5, после чего двигатель достигнет установившегося режима работы со значениями Iа и n, определяемыми условием M = Mст [смотрите равенства (8) и (9), в статье «Общие сведения о двигателях постоянного тока»].
При пуске на холостом ходу Mст = M0. Ток Iа = Iа0 в этом случае мал и составляет обычно 3 – 8 % от Iн.
Заштрихованные на рисунке 2 ординаты представляют собой, согласно выражению (2), представленного в статье «Общие сведения о двигателях постоянного тока», значения избыточного, или динамического, момента
Mдин = M – Mст ,
под воздействием которого происходит увеличение n.
Число ступеней пускового реостата и значения их сопротивлений рассчитываются таким образом, чтобы при надлежащих интервалах времени переключение ступеней максимальные и минимальные значения Iа на всех ступенях получилось одинаковыми.
По условиям нагрева ступени реостата рассчитываются на кратковременную работу под током.
Остановка двигателя производится путем его отключения от сети с помощью рубильника или другого выключателя. Схема рисунка 1 составлена так, чтобы при отключении двигателя цепь обмотки возбуждения не размыкалась, а оставалась замкнутой через якорь. При этом ток в обмотке возбуждения после отключения двигателя уменьшается до нуля не мгновенно, а с достаточно большой постоянной времени. Благодаря этому предотвращается индуктирование в обмотке возбуждения большой э. д. с. самоиндукции, которая может повредить изоляцию этой обмотки.
Применяются также несколько видоизмененные по сравнению с рисунком 1, а схемы пусковых реостатов, без контактной дуги д. Конец цепи возбуждения при этом можно присоединить, например, к контакту 2, и при работе двигателя последовательно с обмоткой возбуждения будут включены последние ступени реостата. Поскольку их сопротивление по сравнению с Rв = rв + Rр.в мало, то это не оказывает большого влияния на работу двигателя.
Автоматизировать переключение пускового реостата неудобно. Поэтому в автоматизированных установках вместо пускового реостата используют пусковые сопротивления (рисунок 1, б), которые поочередно шунтируются контактами К1, К2, К3 автоматически работающих контакторов. Для упрощения схемы и уменьшения количества аппаратов число ступеней принимается минимальным (у двигателей малой мощности обычно 1 – 2 ступени).
Ни в коем случае нельзя допускать разрыва цепи параллельного возбуждения.
В этом случае поток возбуждения исчезает ни сразу, а поддерживается индуктируемыми в ярме вихревыми токами. Однако этот поток будет быстро уменьшаться и скорость n, согласно выражению (7), представленного в статье «Общие сведения о двигателях постоянного тока», будет сильно увеличиваться («разнос» двигателя). При этом [смотрите равенство 8, в статье «Общие сведения о двигателях постоянного тока»] ток якоря значительно возрастет и возникнет круговой огонь, вследствие чего возможно повреждение машины, и поэтому, в частности, в цепях возбуждения не ставят предохранителей и выключателей.
Пуск при пониженном напряжении цепи якоря
Ограничение пускового тока достигается также в случае питания цепи якоря при пуске от отдельного источника тока с регулируемым напряжением (отдельный генератор постоянного тока, управляемый выпрямитель). Обмотку возбуждения при этом необходимо питать от другого источника, с полным напряжением, чтобы иметь при пуске полный ток iв. Этот способ пуска применяют чаще всего для мощных двигателей, притом в сочетании с регулированием скорости вращения.
Пуск двигателей последовательного и смешанного возбуждения производится аналогичным образом. Схема пуска двигателя смешанного возбуждения ничем не отличается от схемы пуска двигателя параллельного возбуждения (рисунок 1), а схема пуска двигателя последовательного возбуждения упрощается за счет исключения параллельной цепи возбуждения.
Для изменения направления вращения (реверсирования) двигателя необходимо изменить направление тока в якоре (вместе с добавочными полюсами и компенсационной обмоткой) или в обмотке (обмотках) возбуждения.
Источник: Вольдек А. И., «Электрические машины. Учебник для технических учебных заведений» – 3-е издание, переработанное – Ленинград: Энергия, 1978 – 832с.