|
|

Макеты страниц
Статистические критерии различения детерминированных сигналов. Для того чтобы задача поиска, или синтеза, оптимальных правил различения сигналов обрела математическую содержательность, необходимо прежде всего задаться некоторым формальным показателем (критерием) качества различения, т. е. количественной мерой, суммирующей ущерб, наносимый ошибочными решениями.
Введение такого показателя не является плодом каких-либо формально-теоретических выкладок: при решении вопроса
об адекватности того или иного критерий реальной ситуации исследователь или проектировщик, учтя все специфические стороны последней, во многом опирается на здравый смысл и техническую интуицию. Избранный на этом этапе критерий в дальнейшем воспринимается как аксиома.
В тех задачах, которые удается свести к проверке простых гипотез, продуктивным оказывается критерий минимума среднего риска, называемый также критерием Байеса. Для того чтобы наиболее наглядно ввести связанную с ним систему понятий и терминов, обратимся к конкретному примеру различения М детерминированных сигналов  ,
,  на фоне помех с полностью заданным статистическим описанием, т. е. с точно известной ПВ любой размерности
на фоне помех с полностью заданным статистическим описанием, т. е. с точно известной ПВ любой размерности  или
или  точно известным функционалом ПВ. В рамках такой модели различения ПВ любой размерности или функционал ПВ наблюдаемого колебания
точно известным функционалом ПВ. В рамках такой модели различения ПВ любой размерности или функционал ПВ наблюдаемого колебания  при условии, что в
при условии, что в  входит сигнал с номером
входит сигнал с номером  — некоторая вполне определенная функция, вид которой зависит лишь от номера
— некоторая вполне определенная функция, вид которой зависит лишь от номера  . При этом имеется М классов, содержащих по одному распределению, т. е. различение сигналов состоит в проверке простых гипотез.
. При этом имеется М классов, содержащих по одному распределению, т. е. различение сигналов состоит в проверке простых гипотез.
Предположим, что известна вероятность  присутствия в
присутствия в  сигнала
сигнала  . Эту вероятность называют априорной (доопытной), поскольку она отражает сведения, которыми располагает наблюдатель, еще не имея в распоряжении реализации
. Эту вероятность называют априорной (доопытной), поскольку она отражает сведения, которыми располагает наблюдатель, еще не имея в распоряжении реализации  и показывает, насколько часто при длительной эксплуатации изучаемой системы можно ожидать появления
и показывает, насколько часто при длительной эксплуатации изучаемой системы можно ожидать появления  в
в  . Для систем М-ичной цифровой связи, например, вероятность
. Для систем М-ичной цифровой связи, например, вероятность  , характеризует среднюю частоту, с которой
, характеризует среднюю частоту, с которой  посылается в канал. Очевидно, вероятность
посылается в канал. Очевидно, вероятность  можно назвать и априорной вероятностью истинности
можно назвать и априорной вероятностью истинности  записав
записав  . Ясно также, что
. Ясно также, что  подчинены условию нормировки
подчинены условию нормировки  , ибо события
, ибо события  составляют полную группу несовместных событий.
составляют полную группу несовместных событий.
Предположим, что  — условная вероятность перепутывания
— условная вероятность перепутывания  сигнала с
сигнала с  , т. е. принятия решения
, т. е. принятия решения  [о присутствии
[о присутствии  в
в  ] при условии, что истинна
] при условии, что истинна  [в
[в  содержится
содержится  ]. Следовательно, множество вероятностей
]. Следовательно, множество вероятностей  при
при  составляет набор условных вероятностен всех ошибочных решений.
составляет набор условных вероятностен всех ошибочных решений.
Эти вероятности для любого фиксированного способа различения сигналов можно вычислить, так как помехи считаются полностью статистически заданными (см. далее).
Введем  неотрицательных величин ПЛ, каждая из которых характеризует риск (потери, ущерб) от перепутывания
неотрицательных величин ПЛ, каждая из которых характеризует риск (потери, ущерб) от перепутывания  -го сигнала с
-го сигнала с  . При этом правильные решения считаются не наносящими ущерба, так что
. При этом правильные решения считаются не наносящими ущерба, так что  . Для наглядности можно считать
. Для наглядности можно считать  некими денежными штрафами, уплачиваемыми за ошибки.
некими денежными штрафами, уплачиваемыми за ошибки.
В каждой отдельной попытке различения сигналов итог (решение) оказывается случайным событием, а поэтому случайным будет и значение риска. Очевидно, безусловную вероятность того, что риск окажется равным  , по теореме умножения вероятностей можно найти как
, по теореме умножения вероятностей можно найти как  , поэтому математическое ожидание риска или средний риск
, поэтому математическое ожидание риска или средний риск

Критерий Байеса, или минимального среднего риска, предписывает добиваться минимума (2.1). Различитель, оптимальный по этому критерию (байесовский различите  , при длительной эксплуатации будет наиболее «экономичным» из всех, поскольку сумма штрафов за ошибки у него окажется наименьшей.
, при длительной эксплуатации будет наиболее «экономичным» из всех, поскольку сумма штрафов за ошибки у него окажется наименьшей.
Хотя задание рисков  (часто и априорных вероятностей
(часто и априорных вероятностей  ) достаточно произвольно, практическая ценность критерия Байеса чрезвычайно велика, так как он, обобщая ряд других критериев, позволяет получить универсальный ответ на вопрос о наилучшей стратегии различения сигналов. Предположим, например, что, не имея объективных данных для назначения всех рисков, разработчик стремится лишь к тому, чтобы различитель как можно реже ошибался, т. е. чтобы полная вероятность ошибки
) достаточно произвольно, практическая ценность критерия Байеса чрезвычайно велика, так как он, обобщая ряд других критериев, позволяет получить универсальный ответ на вопрос о наилучшей стратегии различения сигналов. Предположим, например, что, не имея объективных данных для назначения всех рисков, разработчик стремится лишь к тому, чтобы различитель как можно реже ошибался, т. е. чтобы полная вероятность ошибки

была минимальной. Нетрудно видеть, что такой критерий качества, называемый критерием идеального наблюдателя или критерием Котельникова, можно рассматривать как частный случай байесовского, положив в (2.1)  ,
,  , где П — произвольная неотрицательная константа. При этом
, где П — произвольная неотрицательная константа. При этом  и минимизация среднего риска равносильна минимизации (2.2).
и минимизация среднего риска равносильна минимизации (2.2).
Представим теперь, что затруднение вызывает задание не только рисков, но и априорных вероятностей. Подобная картина типична, например, для радиолокационного обнаружения. Тогда определить полную вероятность ошибки нельзя, но можно предложить вполне удовлетворительный критерий качества — критерий минимума суммы условных вероятностей ошибок

Легко убедиться, что это частный случай байесовского критерия, в котором  . Действительно, после этих подстановок (2.1) примет вид
. Действительно, после этих подстановок (2.1) примет вид  , указывающий на идентичность задач минимизации
, указывающий на идентичность задач минимизации  .
.
В частном случае  рассматриваемая задача переходит в обнаружение детерминированного сигнала
рассматриваемая задача переходит в обнаружение детерминированного сигнала  на фоне помех с известным статистическим
на фоне помех с известным статистическим  этом условные вероятности
этом условные вероятности  и
и  на статистическом языке называют вероятностями ошибок первого и второго рода. Согласно терминологии, принятой в радиоэлектронике, эти же величины именуют более выразительно — вероятности ложной тревоги и
на статистическом языке называют вероятностями ошибок первого и второго рода. Согласно терминологии, принятой в радиоэлектронике, эти же величины именуют более выразительно — вероятности ложной тревоги и  (сигнала), понимая под ложной тревогой факт решения
(сигнала), понимая под ложной тревогой факт решения  об обнаружении сигнала при условии, что он в наблюдаемом колебании
об обнаружении сигнала при условии, что он в наблюдаемом колебании  не содержится, а под пропуском — объявление
не содержится, а под пропуском — объявление  о том, что сигнала в
о том, что сигнала в  нет при условии, что в действительности он в
нет при условии, что в действительности он в  присутствует. Далее для вероятностей ложной тревоги и пропуска будут использованы обозначения
присутствует. Далее для вероятностей ложной тревоги и пропуска будут использованы обозначения  и
и  . Средний риск при обнаружении
. Средний риск при обнаружении  где
где  и
и  — риски, связанные с ложной тревогой и пропуском;
— риски, связанные с ложной тревогой и пропуском;  — априорная вероятность отсутствия
— априорная вероятность отсутствия  в
в  . Соотношения (2.2) и (2.3) в этом случае можно представить в виде
. Соотношения (2.2) и (2.3) в этом случае можно представить в виде

Помимо введенных общих критериев, не связанных с какими-либо допущениями относительно числа М проверяемых гипотез, при обнаружении часто применяют критерий Неймана — Пирсона, предписывающий добиваться минимума вероятности пропуска  при ограничении сверху на вероятность ложной тревоги
при ограничении сверху на вероятность ложной тревоги  .
.
В математической дисциплине, называемой нелинейным программированием и занимающейся вопросами отыскания условных (в заданных областях аргументов) экстремумов функций многих переменных, доказывается известная теорема Куна—Таккера, согласно которой минимизация  при
при  равносильна безусловной минимизации целевой функции
равносильна безусловной минимизации целевой функции  , где
, где  неопределенный коэффициент Лагранжа. Положив
неопределенный коэффициент Лагранжа. Положив  и приведя (2.1) к виду
и приведя (2.1) к виду  , нетрудно убедиться в возможности интерпретации и этого критерия как частного случая байесовского.
, нетрудно убедиться в возможности интерпретации и этого критерия как частного случая байесовского.
Правила оптимального различения обнаружения. Попытаемся выяснить, какой стратегии должен придерживаться байесовский различитель М детерминированных сигналов. При этом в свете ранее изложенного сразу будут установлены и стратегии функционирования различителен, оптимальных по критериям минимума  и
и  , а также обнаружителя Неймана — Пирсона.
, а также обнаружителя Неймана — Пирсона.
Предположим, что из наблюдаемой реализации доступны лишь  дискретных отсчетов
дискретных отсчетов  , составляющих вектор наблюдения
, составляющих вектор наблюдения  . Обобщение на случай непрерывного наблюдения в дальнейшем не составит труда. Пусть
. Обобщение на случай непрерывного наблюдения в дальнейшем не составит труда. Пусть  — условная ПВ вектора
— условная ПВ вектора  при условии, что верна гипотеза
при условии, что верна гипотеза  т. е. что в
т. е. что в  содержится
содержится  . Так как помехи полностью статистически заданы, то
. Так как помехи полностью статистически заданы, то  — некая конкретная функция, удовлетворяющая условиям
— некая конкретная функция, удовлетворяющая условиям  где, как и далее, отсутствие пределов интеграла соответствует интегрированию по всей области задания функции.
где, как и далее, отсутствие пределов интеграла соответствует интегрированию по всей области задания функции.
Любая нерандомизированная (не включающая преднамеренно введенных действий со случайным исходом типа бросания жребия) процедура различения М сигналов может интерпретироваться следующим образом. Допустим, что  -мерное пространство векторов
-мерное пространство векторов  разбито на М (соответственно числу различаемых сигналов) непересекающихся областей решения
разбито на М (соответственно числу различаемых сигналов) непересекающихся областей решения  :
:

Тогда принятие решения различителем сводится к указанию номера области, в которую попал вектор наблюдения  . Если
. Если  , то принимается решение
, то принимается решение  о присутствии в
о присутствии в  сигнала
сигнала  . Возможность такой «геометризации» различения сводит поиски оптимальной стратегии различителя к отысканию наилучшего разбиения
. Возможность такой «геометризации» различения сводит поиски оптимальной стратегии различителя к отысканию наилучшего разбиения  на области решений.
на области решений.
В случае обнаружения  число областей решения также равно двум:
число областей решения также равно двум:  , причем область
, причем область  называют допустимой (при
называют допустимой (при  принимают решение об истинности
принимают решение об истинности  ), а область
), а область  -критической (при
-критической (при  гипотезу
гипотезу  отклоняют и принимают решение
отклоняют и принимают решение  ).
).
Для того чтобы найти оптимальное правило разбиения, подставим в (2.1) выражения для условных вероятностей ошибок  , вытекающие из определения
, вытекающие из определения 
областей  .Тогда
.Тогда

Очевидно, «назначение» конкретной конфигурации областей решения сводится к тому, чтобы, перебрав все векторы  , расписать их по М областям, включив каждый в одну и только одну область
, расписать их по М областям, включив каждый в одну и только одну область  . При этом, как следует из последней формулы, каждый вектор войдет в одно и только одно слагаемое суммы по
. При этом, как следует из последней формулы, каждый вектор войдет в одно и только одно слагаемое суммы по  , отвечающее той области, за которой он закреплен. Поэтому минимума можно добиться, если охватить областью
, отвечающее той области, за которой он закреплен. Поэтому минимума можно добиться, если охватить областью  именно те векторы
именно те векторы  , для которых подынтегральное выражение в
, для которых подынтегральное выражение в  интеграле минимально. Следовательно, разбиением
интеграле минимально. Следовательно, разбиением  на области
на области  , минимизирующим
, минимизирующим  , будет такое, при котором в
, будет такое, при котором в  включаются векторы
включаются векторы  (и только они), удовлетворяющие системе
(и только они), удовлетворяющие системе  неравенств
неравенств

Если перейти к случаю непрерывного наблюдения (к пространствам бесконечной размерности), то  ПВ в (2.4) превратятся в функционалы ПВ
ПВ в (2.4) превратятся в функционалы ПВ  , т. е. область принятия решения
, т. е. область принятия решения  определится системой М неравенств
определится системой М неравенств

Таким образом, байесовский различитель, наблюдая реализацию  , должен установить номер
, должен установить номер  для которого совместно выполнены неравенства (2.5), и принять решение
для которого совместно выполнены неравенства (2.5), и принять решение  о наличии в
о наличии в  сигнала с номером
сигнала с номером  . Представим это правило в виде, который и далее будет использоваться для записи алгоритмов различения сигналов:
. Представим это правило в виде, который и далее будет использоваться для записи алгоритмов различения сигналов:

где символ  указывает на решение, принимаемое при одновременном выполнении всех неравенств в (2.6). Отметим, что величину
указывает на решение, принимаемое при одновременном выполнении всех неравенств в (2.6). Отметим, что величину

называют условным или апостериорным [вычисленным для данной конкретной наблюдаемой реализации  ] средним риском. Поэтому выражение (2.6) подразумевает вычисление для анализируемой реализации
] средним риском. Поэтому выражение (2.6) подразумевает вычисление для анализируемой реализации  значений условного среднего риска
значений условного среднего риска  , и принятие решения о наличии в
, и принятие решения о наличии в  сигнала с тем номером
сигнала с тем номером  , для которого значение
, для которого значение  минимально.
минимально.
Рассмотрим важнейшие частные случаи. Для идеального наблюдателя, минимизирующего (2.2), следует положить  . Тогда выражение (2.6) примет вид
. Тогда выражение (2.6) примет вид

На основании формулы полной вероятности

согласно (2.7), получим

Так как, по теореме умножения вероятностей,  , то соотношение (2.8) может быть переписано как
, то соотношение (2.8) может быть переписано как

Величина  определяет апостериорную (обратную, послсопытную) вероятность гипотезы
определяет апостериорную (обратную, послсопытную) вероятность гипотезы  т. е. вероятность наличия
т. е. вероятность наличия  -гo сигнала в
-гo сигнала в  с учетом всех сведений, которые можно извлечь из наблюдаемой реализации
с учетом всех сведений, которые можно извлечь из наблюдаемой реализации  . Следовательно, идеальный наблюдатель принимает решение в пользу сигнала, имеющего наибольшую апостериорную вероятность, т. е. действует по правилу максимума апостериорной вероятности (МАВ).
. Следовательно, идеальный наблюдатель принимает решение в пользу сигнала, имеющего наибольшую апостериорную вероятность, т. е. действует по правилу максимума апостериорной вероятности (МАВ).
Если данные об априорных вероятностях ненадежны и проектировщик предпочел критерий минимума суммы условных вероятностей ошибок (2.3), то соответствующее оптимальное правило различения можно получить из (2.8) при  :
:

Функционал ПВ  — условной ПВ, определенной при условии истинности гипотезы
— условной ПВ, определенной при условии истинности гипотезы  [присутствия
[присутствия  в
в  ], — рассматриваемый как функция номера гипотезы
], — рассматриваемый как функция номера гипотезы  при фиксированной реализации
при фиксированной реализации  , называют функцией (функционалом) правдоподобия (ФП). Таким образом, стратегия различителя, минимизирующего (2.3), сводится к использованию правила максимума правдоподобия (МП), т. е. к подстановке принятой реализации
, называют функцией (функционалом) правдоподобия (ФП). Таким образом, стратегия различителя, минимизирующего (2.3), сводится к использованию правила максимума правдоподобия (МП), т. е. к подстановке принятой реализации  в выражение для ФП, известное в силу детерминированности сигналов и статистической определенности помех, и подбору
в выражение для ФП, известное в силу детерминированности сигналов и статистической определенности помех, и подбору  , максимизирующего ФП.
, максимизирующего ФП.
В случае обнаружения детерминированного сигнала  выражение (2.6) можно переписать так:
выражение (2.6) можно переписать так:

где расстановка символов  и
и  показывает, вьшолнение какого из неравенств влечет за собой принятие соответствующего решения. Правило (2.11) традиционно представляют в виде
показывает, вьшолнение какого из неравенств влечет за собой принятие соответствующего решения. Правило (2.11) традиционно представляют в виде

называя отношение  двух значений ФП отношением (коэффициентом) правдоподобия (ОП). Как видно, байесовский обнаружитель детерминированного сигнала должен для полученной реализации
двух значений ФП отношением (коэффициентом) правдоподобия (ОП). Как видно, байесовский обнаружитель детерминированного сигнала должен для полученной реализации  вычислить ОП
вычислить ОП  и сравнить его с порогом
и сравнить его с порогом  , зависящим от рисков и априорных вероятностей отсутствия и наличия сигнала.
, зависящим от рисков и априорных вероятностей отсутствия и наличия сигнала.
Если разработчик обнаружителя ориентируется на критерий идеального наблюдателя, то в выражении (2.12) следует положить  , что превратит его в правило МАВ, сделав пороговый уровень равным
, что превратит его в правило МАВ, сделав пороговый уровень равным  . Аналогично, принятие за основу критерия минимума
. Аналогично, принятие за основу критерия минимума  придаст (2.12) вид правила МП, для которого
придаст (2.12) вид правила МП, для которого  .
.
Наконец, стратегию обнаружителя,оптимального по Нейману — Пирсону, также можно описать соотношением (2.12), если значение  выбрать из условия поддержания вероятности ложной тревоги не выше заданного уровня.
выбрать из условия поддержания вероятности ложной тревоги не выше заданного уровня.
Как видно, обнаружители, оптимальные по любому из рассмотренных критериев, должны выполнять одни и те же действия: вычислять ОП и сравнивать его с порогом. От конкретного критерия зависит лишь значение порога, и поэтому обнаружитель, наилучший по одному критерию, трансформируется в оптимальный по другому простым изменением порога
Завершим параграф одним существенным для дальнейшего рассуждением. Хотя выражения (2.6) — (2.12) однозначно определяют последовательность действий оптимальных различителен, соображения практического плана нередко толкают на путь таких модификаций этих правил, реальное воплощение которых (аппаратурное или программное) оказалось бы наиболее простым. В основе подобных модификаций лежит переход от величин, фигурирующих в (2.6) — (2.12), к так называемым  статистикам — величинам, заменяющим ФП, ОП и т. п. без потери оптимальности соответствующего правила. Так, достаточными статистиками при различении сигналов по правилу МАВ будут величины
статистикам — величинам, заменяющим ФП, ОП и т. п. без потери оптимальности соответствующего правила. Так, достаточными статистиками при различении сигналов по правилу МАВ будут величины  , по правилу МП —
, по правилу МП —  , при
, при  и
и  , где
, где  — любая монотонно изменяющаяся функция. Действительно, если, например, функция
— любая монотонно изменяющаяся функция. Действительно, если, например, функция  монотонно возрастает, то система неравенств
монотонно возрастает, то система неравенств

равносильна системе неравенств в (2.10), поэтому правило

есть просто эквивалентная запись правила МП (2.10).
Оглавление
- Предисловие
- ВВЕДЕНИЕ
- ЧАСТЬ 1. ВВЕДЕНИЕ В СТАТИСТИЧЕСКУЮ ТЕОРИЮ РАДИОТЕХНИЧЕСКИХ СИСТЕМ
- ГЛАВА 1. ПЕРЕНОСЧИКИ ИНФОРМАЦИИ И ПОМЕХИ В РАДИОТЕХНИЧЕСКИХ СИСТЕМАХ
- §1.2. ПОЛЯ, СИГНАЛЫ, ПОМЕХИ. ПРЕДМЕТ СТАТИСТИЧЕСКОЙ ТЕОРИИ РТС
- § 1.3. ПРЕДСТАВЛЕНИЕ СИГНАЛОВ И ПОМЕХ
- § 1.4. НОРМАЛЬНЫЙ ВЕКТОР И НОРМАЛЬНЫЙ СЛУЧАЙНЫЙ ПРОЦЕСС. БЕЛЫЙ ШУМ
- ГЛАВА 2. ОСНОВЫ ТЕОРИИ ОБНАРУЖЕНИЯ И РАЗЛИЧЕНИЯ СИГНАЛОВ
- § 2.1. СОДЕРЖАНИЕ И КЛАССИФИКАЦИЯ ЗАДАЧ ОБНАРУЖЕНИЯ И РАЗЛИЧЕНИЯ СИГНАЛОВ
- § 2.2. РАЗЛИЧЕНИЕ ДЕТЕРМИНИРОВАННЫХ СИГНАЛОВ
- § 2.3. РАЗЛИЧЕНИЕ СИГНАЛОВ СО СЛУЧАЙНЫМИ ПАРАМЕТРАМИ
- § 2.4. ФУНКЦИЯ И ОТНОШЕНИЕ ПРАВДОПОДОБИЯ ПРИ РАЗЛИЧЕНИИ СИГНАЛОВ НА ФОНЕ АДДИТИВНОГО НОРМАЛЬНОГО ШУМА
- ГЛАВА 3. АЛГОРИТМЫ И УСТРОЙСТВА ОПТИМАЛЬНОГО ОБНАРУЖЕНИЯ И РАЗЛИЧЕНИЯ СИГНАЛОВ
- § 3.1. ОБНАРУЖЕНИЕ ДЕТЕРМИНИРОВАННОГО СИГНАЛА
- § 3.2. ОБНАРУЖЕНИЕ СИГНАЛА СО СЛУЧАЙНОЙ НАЧАЛЬНОЙ ФАЗОЙ
- § 3.3. ОБНАРУЖЕНИЕ СИГНАЛА СО СЛУЧАЙНЫМИ АМПЛИТУДОЙ И НАЧАЛЬНОЙ ФАЗОЙ
- § 3.4. ОБНАРУЖЕНИЕ ПАКЕТОВ ИМПУЛЬСОВ
- § 3.5. ОБНАРУЖЕНИЕ СЛУЧАЙНЫХ СИГНАЛОВ
- §3.6. СТРУКТУРЫ И ПОКАЗАТЕЛИ РАЗЛИЧИТЕЛЕЙ ДЕТЕРМИНИРОВАННЫХ СИГНАЛОВ
- §3.7. РАЗЛИЧЕНИЕ СИГНАЛОВ СО СЛУЧАЙНЫМИ НАЧАЛЬНЫМИ ФАЗАМИ
- §3.8. ОПТИМАЛЬНЫЙ ПРИЕМ СИГНАЛОВ НА ФОНЕ НЕБЕЛОГО ШУМА
- ГЛАВА 4. ОСНОВЫ ТЕОРИИ ИЗМЕРЕНИЯ ПАРАМЕТРОВ СИГНАЛОВ РАДИОТЕХНИЧЕСКИХ СИСТЕМ
- § 4.1. СОДЕРЖАНИЕ И КЛАССИФИКАЦИЯ ЗАДАЧ ИЗМЕРЕНИЯ ПАРАМЕТРОВ СИГНАЛОВ
- § 4.2. БАЙЕСОВСКИЕ ОЦЕНКИ СЛУЧАЙНЫХ ПАРАМЕТРОВ СИГНАЛОВ
- § 4.3. КРИТЕРИИ ОЦЕНКИ НЕСЛУЧАЙНЫХ ПАРАМЕТРОВ СИГНАЛОВ. ГРАНИЦА КРАМЕРА—РАО
- § 4.4. ОЦЕНКИ ПО МАКСИМУМУ ПРАВДОПОДОБИЯ
- § 4.5. ОЦЕНКИ ПО МАКСИМУМУ ПРАВДОПОДОБИЯ ПРИ НАЛИЧИИ У СИГНАЛА НЕИНФОРМАЦИОННЫХ ПАРАМЕТРОВ
- § 4.6. ОЦЕНКА ПАРАМЕТРОВ СИГНАЛА НА ФОНЕ АДДИТИВНОГО НОРМАЛЬНОГО ШУМА
- § 4.7. ВЫЧИСЛЕНИЕ ДИСПЕРСИЙ ОЦЕНОК. ФУНКЦИИ НЕОПРЕДЕЛЕННОСТИ
- § 4.8. АНОМАЛЬНЫЕ ОШИБКИ И ПОРОГОВЫЕ ЭФФЕКТЫ ПРИ ОЦЕНКЕ ПАРАМЕТРОВ СИГНАЛОВ
- § 4.9. ЭЛЕМЕНТЫ ТЕОРИИ ФИЛЬТРАЦИИ ПАРАМЕТРОВ СИГНАЛОВ
- ГЛАВА 5. ПРИМЕРЫ РЕАЛИЗАЦИИ И РАСЧЕТА ТОЧНОСТИ АЛГОРИТМОВ ОЦЕНКИ ПАРАМЕТРОВ СИГНАЛОВ
- § 5.1. ОЦЕНКА ВСЕХ НЕИЗВЕСТНЫХ ПАРАМЕТРОВ СИГНАЛОВ
- §5.2. ОЦЕНКИ ПАРАМЕТРОВ СИГНАЛА СО СЛУЧАЙНОЙ ФАЗОЙ
- ГЛАВА 6. РАЗРЕШЕНИЕ СИГНАЛОВ. СЛОЖНЫЕ СИГНАЛЫ
- § 6.1. ПОНЯТИЕ О РАЗРЕШЕНИИ И РАЗРЕШАЮЩЕЙ СПОСОБНОСТИ
- § 6.2. ФУНКЦИЯ НЕОПРЕДЕЛЕННОСТИ В ТЕОРИИ РАЗРЕШЕНИЯ
- § 6.3. РАЗРЕШЕНИЕ ПО ВРЕМЕНИ ЗАПАЗДЫВАНИЯ. ПРОСТЫЕ И СЛОЖНЫЕ СИГНАЛЫ
- § 6.4. ВИДЫ СЛОЖНЫХ СИГНАЛОВ
- § 6.5. РАЗРЕШЕНИЕ ПО ВРЕМЕНИ ЗАПАЗДЫВАНИЯ И ЧАСТОТЕ. ЧАСТОТНО-ВРЕМЕННАЯ ФУНКЦИЯ НЕОПРЕДЕЛЕННОСТИ СИГНАЛА
- ЧАСТЬ 2. РАДИО ЛОКАЦИОННЫЕ И РАДИО НАВИГАЦИОННЫЕ СИСТЕМЫ
- ГЛАВА 7. ОСНОВНЫЕ ПРИНЦИПЫ ПОСТРОЕНИЯ РАДИОЛОКАЦИОННЫХ И РАДИОНАВИГАЦИОННЫХ СИСТЕМ
- § 7.2. РАДИОТЕХНИЧЕСКИЕ МЕТОДЫ ИЗМЕРЕНИЯ КООРДИНАТ И ИХ ПРОИЗВОДНЫХ
- § 7.3. КЛАССИФИКАЦИЯ РАДИОЛОКАЦИОННЫХ И РАДИОНАВИГАЦИОННЫХ СИСТЕМ, ИХ ТАКТИЧЕСКИЕ И ТЕХНИЧЕСКИЕ ХАРАКТЕРИСТИКИ
- § 7.4. ПОСТРОЕНИЕ И ОСНОВНЫЕ ХАРАКТЕРИСТИКИ РЛС КРУГОВОГО ОБЗОРА
- ГЛАВА 8. ФИЗИЧЕСКИЕ ОСНОВЫ РАДИОЛОКАЦИОННОГО ОБНАРУЖЕНИЯ ОБЪЕКТОВ
- § 8.1. РАДИОЛОКАЦИОННЫЕ ЦЕЛИ И ФОРМИРОВАНИЕ ОТРАЖЕННЫХ СИГНАЛОВ
- § 8.2. ЭФФЕКТИВНАЯ ПЛОЩАДЬ РАССЕЯНИЯ ПРОСТЕЙШИХ ОБЪЕКТОВ
- § 8.3. ЭФФЕКТИВНАЯ ПЛОЩАДЬ РАССЕЯНИЯ ГРУППОВЫХ И РАСПРЕДЕЛЕННЫХ ОБЪЕКТОВ
- § 8.4. СТАТИСТИЧЕСКИЕ СВОЙСТВА ЭПР ЦЕЛЕЙ И ОТРАЖЕННЫХ СИГНАЛОВ
- ГЛАВА 9. ДАЛЬНОСТЬ ДЕЙСТВИЯ РАДИОСИСТЕМ
- § 9.1. ДАЛЬНОСТЬ ДЕЙСТВИЯ РАДИОЛИНИЙ
- § 9.2. ОБОБЩЕННОЕ УРАВНЕНИЕ ДАЛЬНОСТИ РАДИОЛОКАЦИОННОГО НАБЛЮДЕНИЯ В СВОБОДНОМ ПРОСТРАНСТВЕ
- § 9.3. ВЛИЯНИЕ ОТРАЖЕНИЯ РАДИОВОЛН ОТ ЗЕМНОЙ ПОВЕРХНОСТИ НА ДАЛЬНОСТЬ ДЕЙСТВИЯ РЛС
- § 9.4. ВЛИЯНИЕ УСЛОВИЙ РАСПРОСТРАНЕНИЯ РАДИОВОЛН НА ДАЛЬНОСТЬ ДЕЙСТВИЯ РАДИОЛОКАЦИОННЫХ И РАДИОНАВИГАЦИОННЫХ СИСТЕМ
- ГЛАВА 10. ТОЧНОСТЬ РАДИОТЕХНИЧЕСКИХ МЕТОДОВ МЕСТООПРЕДЕЛЕНИЯ
- § 10.1. ПОГРЕШНОСТИ ИЗМЕРЕНИЯ РАДИОНАВИГАЦИОННОГО ПАРАМЕТРА
- § 10.2. ПОГРЕШНОСТИ ОПРЕДЕЛЕНИЯ ЛИНИЙ ПОЛОЖЕНИЯ РАДИОНАВИГАЦИОННЫХ СИСТЕМ
- § 10.3. ПОГРЕШНОСТИ ОПРЕДЕЛЕНИЯ КООРДИНАТ ОБЪЕКТА ПОЗИЦИОННЫМ МЕТОДОМ
- § 10.4. РАБОЧИЕ ЗОНЫ РАДИОНАВИГАЦИОННЫХ СИСТЕМ
- § 10.5. ВЛИЯНИЕ ГЕОМЕТРИЧЕСКОГО ФАКТОРА РАДИОНАВИГАЦИОННОЙ СИСТЕМЫ И УСЛОВИЙ РАСПРОСТРАНЕНИЯ РАДИОВОЛН НА ТОЧНОСТЬ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ОБЪЕКТА
- ГЛАВА 11 ПОИСК СИГНАЛОВ В РАДИОЛОКАЦИОННЫХ И РАДИОНАВИГАЦИОННЫХ СИСТЕМАХ
- § 11.1. ПОИСК СИГНАЛОВ ПО УГЛОВЫМ КООРДИНАТАМ, ДАЛЬНОСТИ И СКОРОСТИ
- § 11.2. МЕТОДЫ ПОСЛЕДОВАТЕЛЬНОГО ОБЗОРА ПРОСТРАНСТВА
- § 11.3. МНОГОКАНАЛЬНЫЙ И УПРАВЛЯЕМЫЙ ОБЗОР ПРОСТРАНСТВА
- § 11.4. ОСОБЕННОСТИ ПОИСКА СИГНАЛОВ В РАДИОНАВИГАЦИОННЫХ СИСТЕМАХ
- ГЛАВА 12. ВЫДЕЛЕНИЕ СИГНАЛОВ ДВИЖУЩИХСЯ ЦЕЛЕЙ НА ФОНЕ ПАССИВНЫХ ПОМЕХ
- § 12.1. МЕТОДЫ ЗАЩИТЫ ОТ ПАССИВНЫХ ПОМЕХ
- § 12.2. СЕЛЕКЦИИ ДВИЖУЩИХСЯ ЦЕЛЕЙ НА ОСНОВЕ ЭФФЕКТА ДОПЛЕРА
- § 12.3. АНАЛОГОВАЯ И ЦИФРОВАЯ ФИЛЬТРАЦИИ В СИСТЕМАХ СЕЛЕКЦИИ ДВИЖУЩИХСЯ ЦЕЛЕЙ
- § 12.4. ЭФФЕКТИВНОСТЬ СИСТЕМЫ СЕЛЕКЦИИ ДВИЖУЩИХСЯ ЦЕЛЕЙ И ЕЕ ЗАВИСИМОСТЬ ОТ ПАРАМЕТРОВ РАДИОЛОКАЦИОННОЙ СТАНЦИИ
- § 12.5. МЕТОДЫ ПОВЫШЕНИЯ ЭФФЕКТИВНОСТИ СИСТЕМ СЕЛЕКЦИИ ДВИЖУЩИХСЯ ЦЕЛЕЙ
- ГЛАВА 13. ФАЗОВЫЕ И ИМПУЛЬСНО-ФАЗОВЫЕ РАДИОНАВИГАЦИОННЫЕ СИСТЕМЫ
- § 13.1. ОСОБЕННОСТИ ФАЗОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ. ФАЗОВЫЙ МЕТОД ИЗМЕРЕНИЯ ДАЛЬНОСТИ
- § 13.2. МНОГОЧАСТОТНЫЕ ФАЗОВЫЕ РАДИОНАВИГАЦИОННЫЕ СИСТЕМЫ
- § 13.3. УСТРАНЕНИЕ МНОГОЗНАЧНОСТИ ИЗМЕРЕНИЙ В МНОГОЧАСТОТНЫХ ФАЗОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМАХ
- § 13.4. ПОСТРОЕНИЕ ПРИЕМОИНДИКАТОРОВ МНОГОЧАСТОТНЫХ ФАЗОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ
- § 13.5. ИМПУЛЬСНО-ФАЗОВЫЕ РАДИОНАВИГАЦИОННЫЕ СИСТЕМЫ
- § 13.6. УСТРАНЕНИЕ МНОГОЗНАЧНОСТИ ИЗМЕРЕНИЙ В ИМПУЛЬСНО-ФАЗОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМАХ
- § 13.7. ПОСТРОЕНИЕ ЦИФРОВЫХ ПРИЕМОИНДИКАТОРОВ ИМПУЛЬСНО-ФАЗОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ
- ГЛАВА 14 СПУТНИКОВЫЕ РАДИОНАВИГАЦИОННЫЕ СИСТЕМЫ
- § 14.1. СПУТНИКОВЫЕ РАДИОНАВИГАЦИОННЫЕ СИСТЕМЫ ПЕРВОГО ПОКОЛЕНИЯ
- § 14.2. СПУТНИКОВЫЕ РАДИОНАВИГАЦИОННЫЕ СИСТЕМЫ ВТОРОГО ПОКОЛЕНИЯ
- § 14.3. ПРИНЦИПЫ ПОСТРОЕНИЯ АППАРАТУРЫ ПОТРЕБИТЕЛЕЙ СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ ВТОРОГО ПОКОЛЕНИЯ
- ГЛАВА 15. ИЗМЕРЕНИЕ ВРЕМЕНИ ЗАПАЗДЫВАНИЯ СИГНАЛОВ В РАДИОНАВИГАЦИОННЫХ СИСТЕМАХ
- § 15.2. ПРИНЦИПЫ ПОСТРОЕНИЯ СЛЕДЯЩИХ ИЗМЕРИТЕЛЕЙ
- § 15.3. РАСЧЕТ ДИСПЕРСИИ ОЦЕНКИ ВРЕМЕНИ ЗАПАЗДЫВАНИЯ В СЛЕДЯЩИХ ИЗМЕРИТЕЛЯХ ПРИ ДЕЙСТВИИ ФЛУКТУАЦИОННЫХ ПОМЕХ
- § 15.4. КАЧЕСТВЕННЫЕ ПОКАЗАТЕЛИ ВРЕМЕННЫХ ДИСКРИМИНАТОРОВ ПРИ ИСПОЛЬЗОВАНИИ ПРОСТЫХ СИГНАЛОВ
- § 15.5. ОСОБЕННОСТИ ПОСТРОЕНИЯ ВРЕМЕННЫХ ДИСКРИМИНАТОРОВ ПРИ ИСПОЛЬЗОВАНИИ СЛОЖНЫХ СИГНАЛОВ
- ГЛАВА 16 ЧАСТОТНЫЕ ДАЛЬНОМЕРНЫЕ СИСТЕМЫ
- § 16.1. ЧАСТОТНЫЙ МЕТОД ИЗМЕРЕНИЯ ДАЛЬНОСТИ
- § 16.2. СОВМЕСТНОЕ ИЗМЕРЕНИЕ ДАЛЬНОСТИ И СКОРОСТИ ОБЪЕКТА ЧАСТОТНЫМ МЕТОДОМ
- § 16.3. ИЗМЕРЕНИЕ ДАЛЬНОСТИ МНОГИХ ОБЪЕКТОВ
- § 16.4. ОСОБЕННОСТИ ПРИМЕНЕНИЯ ЧАСТОТНОГО МЕТОДА В РАДИОВЫСОТОМЕРАХ
- ГЛАВА 17. РАДИОТЕХНИЧЕСКИЕ СИСТЕМЫ ИЗМЕРЕНИЯ СКОРОСТИ
- § 17.1. ДОПЛЕРОВСКИЙ МЕТОД ИЗМЕРЕНИЯ ПУТЕВОЙ СКОРОСТИ И УГЛА СНОСА
- § 17.2. ИЗМЕРЕНИЕ ПУТЕВОЙ СКОРОСТИ И УГЛА СНОСА МНОГОЛУЧЕВЫМИ СИСТЕМАМИ
- § 17.3. ПОСТРОЕНИЕ ДОПЛЕРОВСКИХ ИЗМЕРИТЕЛЕЙ ВЕКТОРА СКОРОСТИ
- § 17.4. КОРРЕЛЯЦИОННЫЙ МЕТОД ИЗМЕРЕНИЯ ПУТЕВОЙ СКОРОСТИ И УГЛА СНОСА
- § 17.5. ИЗМЕРИТЕЛЬ СКОРОСТИ В СОСТАВЕ НАВИГАЦИОННОГО КОМПЛЕКСА
- ГЛАВА 18. МЕТОДЫ И УСТРОЙСТВА ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ
- § 18.1. МЕТОДЫ ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ
- § 18.2. ТОЧНОСТЬ И РАЗРЕШАЮЩАЯ СПОСОБНОСТЬ РАДИОСИСТЕМ ПРИ ПРОСТРАНСТВЕННО-ВРЕМЕННОЙ ОБРАБОТКЕ
- § 18.3. РЛС БОКОВОГО ОБЗОРА С СИНТЕЗИРОВАНИЕМ АПЕРТУРЫ
- § 18.4. СЛЕДЯЩИЕ ИЗМЕРИТЕЛИ НАПРАВЛЕНИЯ
- § 18.5. ОДНОКАНАЛЬНЫЕ СЛЕДЯЩИЕ ИЗМЕРИТЕЛИ НАПРАВЛЕНИЯ С КОНИЧЕСКИМ СКАНИРОВАНИЕМ
- § 18.6. МОНОИМПУЛЬСНЫЕ ИЗМЕРИТЕЛИ УГЛОВЫХ КООРДИНАТ
- § 18.7. ПРЕОБРАЗОВАНИЕ УГЛОВЫХ КООРДИНАТ В ЦИФРОВОЙ КОД
- ГЛАВА 19. ОПТИЧЕСКАЯ ЛОКАЦИЯ
- § 19.1. ФИЗИЧЕСКИЕ ОСНОВЫ ОПТИЧЕСКОЙ ЛОКАЦИИ
- § 19.2. ОПТИМАЛЬНЫЕ МЕТОДЫ ОБРАБОТКИ СИГНАЛОВ В ОПТИЧЕСКИХ ЛОКАЦИОННЫХ СИСТЕМАХ
- ГЛАВА 20. РАДИОТЕПЛОЛОКАЦИЯ
- § 20.1. ФИЗИЧЕСКИЕ ОСНОВЫ ПАССИВНОЙ РАДИОЛОКАЦИИ
- § 20.2. ОБНАРУЖЕНИЕ РАДИОТЕПЛОВЫХ СИГНАЛОВ. СТРУКТУРНЫЕ СХЕМЫ РАДИОМЕТРОВ
- § 20.3. ИЗМЕРЕНИЕ КООРДИНАТ ОБЪЕКТОВ С ПОМОЩЬЮ РАДИОТЕПЛОЛОКАТОРОВ
- ГЛАВА 21 СИСТЕМЫ РАДИОПРОТИВОДЕЙСТВИЯ. ЗАЩИТА ОТ АКТИВНЫХ ПОМЕХ
- § 21.1. МЕТОДЫ РАДИОПРОТИВОДЕЙСТВИЯ. ОСНОВНЫЕ ВИДЫ АКТИВНЫХ ПОМЕХ
- § 21.2. СИСТЕМЫ РАДИОТЕХНИЧЕСКОЙ РАЗВЕДКИ
- § 21.3. МЕТОДЫ ЗАЩИТЫ ОТ АКТИВНЫХ ПОМЕХ
- ГЛАВА 22. МЕТОДЫ ОЦЕНИВАНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ОБЪЕКТОВ И КОМПЛЕКСИРОВАНИЕ СИСТЕМ
- § 22.2. МЕТОДЫ ОЦЕНИВАНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ОБЪЕКТОВ
- § 22.3. КОМПЛЕКСНЫЕ РАДИОТЕХНИЧЕСКИЕ СИСТЕМЫ
- § 22.4. НАВИГАЦИОННЫЕ КОМПЛЕКСЫ САМОЛЕТОВ И СУДОВ
- ЗАКЛЮЧЕНИЕ
- Список литературы
Критерий МП получается из критерия
минимального среднего риска, если
принять, что П12 = 1/P(S1),
П21 = 1/P(S2).
При этом оптимальный приемник принимает
решение таким образом, что минимизируется
значение
l п = P(y2/S1)
+ P(y1/S2).
(2.3)
Критерий МП иногда называется критерием
минимума потерь информации, так как
оптимальное правило решения в этом
случае устанавливает границу
подпространства (рис.1.2) так, чтобы
уменьшить вероятность искажения того
сигнала, вероятность передачи которого
меньше (следовательно, этот сигнал
содержит больше информации).
Критерий МП применяется в системах
связи также в тех случаях, когда априорные
вероятности Р(S1)и
P(S2)неизвестны.
3. Критерий идеального наблюдателя.
Если весовые коэффициенты П12
= П21=1, то критерий
минимального среднего риска минимизирует
среднюю вероятность ошибки
pош
= P(S1)P(y2/S1)
+ P(S2)P(y1/S2)
(2.4)
и называется критерием идеального
наблюдателя.
Критерий идеального наблюдателя широко
применяется в системах связи, когда
искажения любого сигнала одинаково
нежелательны и совпадает с критерием
МП, если вероятности Р(S1)
= P(S2) = 0,5.
4. Критерий Неймана-Пирсона.
В некоторых системах передачи информации
(системах радиолокации, некоторых
системах сигнализации) имеется
необходимость фиксирования (задания)
одной из условных вероятностей Р(у1/S2)илиР(у2/S1).При этом оптимальный приемник принимает
решение таким образом, чтобы минимизировать
ту условную вероятность, которая не
задана. Критерий оптимальности, который
используется таким приемником называетсякритерием Неймана-Пирсона.
Например, задана вероятность пропуска
сигнала S1, то естьР(у2/S1)
= ..Тогда
критерий Неймана-Пирсона требует
минимизации условной вероятностиР(у1/S2),обеспечивая заданное значение.
ВероятностьР(у1/S2)обычно обозначается ,тогда (1-)
= Р(у2/S2)называется качеством решения.Правило решения Неймана-Пирсона
обеспечивает(min )
илимах(1- )при =
const.
Приемник при использовании критерия
Неймана-Пирсона строится таким образом,
чтобы получить достаточно малую
вероятность пропуска cигнала(цели )
Р(у2/S1)=..С тем, что при этом может (несмотря на
минимизацию=Р(у1/S2))
оказаться много ложных тревог, приходится
мириться. В этом и заключается сущность
данного критерия.
3. Отношение правдоподобия
Различение сигналов в приемном устройстве
обычно осуществляют путем установления
некоторого «порога» на выходе
приемника, фактически играющего роль
«границы подпространств» сигналов
S1 иS2
.
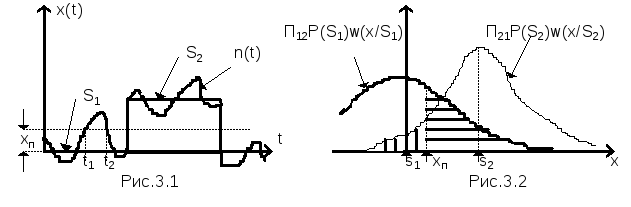
На рис. 3.1. приведен некоторый дискретный
сигнал х(t)(импульсы постоянного
тока), на который накладывается
флюктуационная помеха и проведена
пунктирная линия, соответствующая
выбранному порогухп.
Если величина x(t) < xп
, приемник выдает сигналS1,
если жеx(t)>xп ,приемник выдает сигнал S2.
Как видно из рисунка, на отрезке времениt1, t2под
действием сильной помехи величина х
> xп, т. е. в этом случае
приемник может выдать сигналS2
, хотя передавалсяS1.
Различные критерии приема дискретных
сигналов фактически отличаются способом
установления величины порога. Данная
задача проще всего решается с помощью
«отношения правдоподобия«. Для
рассмотрения этого вопроса обратимся
к рис. 3. 2.
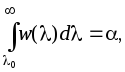
Если бы на входе приемника отсутствовали
помехи, мы имели бы дело с «чистыми»
сигналами S1 иS2
и задача разделения сигналов
была бы очень проста. При наличии же
помех сигналы искажаются и для их
описания приходится использовать
вероятностное пространство. Сами сигналы
вместе с помехами описываются уже
функциями плотности вероятности w(x/S1)и w(x/S2), которые изображены
на рис. 3.2. (эти функции умножены также
на весовые коэффициентыП12Р(S1)иП21Р(S2)).На этом же рисунке показан порог хп.
Заштрихованная часть рисунка левее хп
имеет площадь, равную
![]() П21Р(S2)w(x/S2)dx
П21Р(S2)w(x/S2)dx
= П21Р(S2)P(x/S2),
(3.1)
а заштрихованная часть правее хпимеет площадь, равную
![]() П12Р(S1)w(x/S1)dx
П12Р(S1)w(x/S1)dx
= П12Р(S1)P(x/S1),
(3.2)
Сумма этих величин, в
соответствии с формулой (2.1), есть средний
рискRср. Из рис. 3.2. видно,
чтоRсрбудет минимальным,
когда минимальна суммарная площадь под
кривыми. Это будет в том случае, если
величинахп соответствует
точке пересечения кривых на рис. 3.2.
Следовательно, условием полученияmin{Rср} является такой
порогхп,при котором
наступает равенство ординат приведенных
кривых, т. е.
П12Р(S1)w(x/S1)dx
= П21Р(S2)w(x/S2),
(3.3)
откуда получаем следующее соотношение:
![]() . (3.4)
. (3.4)
Стоящее слева выражение называется
отношением правдоподобия
(х) =
![]() ,(3.5)
,(3.5)
а w(x/S i),которая
представляет собой плотность вероятности
того, что принятый сигнал х образовался
при передаче сигнала Si
, обычно называетсяфункцией
правдоподобия (функцией правдоподобия
является также любая монотонная функция
от w(x/Si),напримерlog[
w(x/Si)]).
Чем больше значение w(x/S i),тем более вероятно, чтохсодержит
сигналSi(это очевидно из
рис. 3.2). Справа стоящее выражение
называетсяпороговым отношением
правдоподобия
0 =
![]() .
.
(3.6)
Приемник, использующий отношение
правдоподобия, работает следующим
образом.
1. Анализируя поступающий на его вход
сигнал, вычисляет отношение правдоподобия
(х).
2. По известным значениям априорных
вероятностей Р(S1)иP(S2),а также заданным
весовым коэффициентомП21и П12, вычисляется пороговое
отношение правдоподобия 0.
3. Величина (х)сравнивается с0,
если (х)
> 0,
приемник выдает сигнал S1,
в противном случае
сигнал S2 .
(3.7)
Выражение (3.7) является правилом решения
Ф(х)решающего устройства, показанного
на рис.1.3.
Правило решения (3.7) является общим для
двоичных систем связи, использующих
любой критерий оптимального приема ;
отличие только в значении порога 0
.
Если приемник работает по критерию
минимального среднего риска, величина
0определяется формулой (3.6).
Для критерия идеального наблюдателя,
в этой формуле коэффициенты
П12 = П21= 1 и тогда0
= P(S2)/ P(S1), (3.8)
Для критерия максимального правдоподобия
П12
= 1/ P(S1)
, П21
= 1/ Р(S2),
тогда
0
=1. (3.9)
Если приемник использует критерий
Неймана-Пирсона, то отношение правдоподобия
(х) становится
случайной величиной, так как в равенстве
(3.1) Р(у1/S2)
=(задается
потребителем). Пороговое отношение
правдоподобия определяется как верхний
предел интеграла
 (3.10)
(3.10)
где w()— плотность распределения отношения
правдоподобия (х).
Правило принятия решения приемником
с использованием отношения правдоподобия
рассмотрим на следующих примерах.
Условия задачи.
Пусть на вход приемника поступает
аддитивная смесь сигнала (дискретная
амплитудная модуляция) и помехи:
![]() , где i=1,2;
, где i=1,2;
![]()
n(t)флюктуационная помеха типа гауссовского
шума с дисперсией![]() .
.
На протяжении длительности одной
элементарной посылки в решающей схеме
приемника в синхронные моменты времени
t1иt2произведено два отсчета(замера) сигналаx(t), причем t
= t2-t1больше
интервала корреляции помехиn(t).
Измеренные значенияx(t1)=x1= 0,2 B; x(t2)=x2= 0,3B. Амплитуда
сигнала A=0,4 B.
Определить отношение правдоподобия
и принять решение по критерию идеального
наблюдателя, какой из двух сигналов (S1или S2)поступил на вход
приемника для двух случаев:
а)![]() ;
;
б)![]() ;
;![]() .
.
Решение задачи(когерентный
прием).
1. Найдем отношение правдоподобия .
Плотность вероятности сигнала
x(t)=S1(t)+n(t)имеет вид
 .
.
Так как на протяжении элементарного
сигнала производятся два отсчета, то
для нахождения отношения правдоподобия
требуется найти двухмерную плотность
вероятностей w2(x1x2/s1).
Учитывая, что отсчеты некоррелированы
(t больше
интервала корреляции), а помеха
распределена по гауссовскому закону,
эти отсчеты можно считать независимыми.
В этом случае двухмерная плотность
вероятностей равна произведению
одномерных плотностей
 .
.
Аналогично
 .
.
Отношение правдоподобия
 .
.
Подставляя численные значения A,n,
x1, x2,получим:
(0,2;0,3)= 2,7.
2.Применяем правило решения (3.7 ).
а) Пороговое отношение правдоподобия
приP(s1)=P(s2)=0,5
![]() .
.
В нашем случае (x1x2)=2,7
> 0=1
и приемник выдает сигнал S1.
б)Пороговое отношение правдоподобия
приP(s1)=0,2 и P(s2)=0,8
![]() .
.
В этом случае (x1x2)=2,7
< 0=4
и приемник выдает сигналS2.
Полученные результаты вполне объяснимы:
в случае a)измеренное значениеx(t1)=0,2B соответствует
половине амплитудыА=0,4В, а измеренное
значениеx(t2)=0,3Bближе
к сигналуS1, поэтому при
равной вероятности сигналов приемник
выдает решение в пользу сигналаS1;
в случаеб) измеренные значения
сигнала ближе кS1, но зато
сигналS2(t)встречается
в 4 раза чаще, чем сигналS1(t),
и точное решение задачи с учетом всех
обстоятельств во втором случае получается
в пользу сигнала S2.
Решение задачи(некогерентный прием).
Решим эту же задачу в предположении,
что в приемнике используется обычный
амплитудный детектор .
Найдем отношение правдоподобия для
этого случая. Плотность вероятности
x(t) при передаче сигнала S1(t)определяется обобщенным законом Релея
 ,
,
а плотность вероятности x(t) при
передаче сигналаS2(t)определяется простым законом Релея
 .
.
Как и в предыдущем примере, отношение
правдоподобия будет определяться
отношением двухмерных плотностей
вероятности. После простых преобразований
получаем
 .
.
Подставляя сюда численные значения
А, n,
x1, x2,получим
![]() .
.
Как и в предыдущем примере, а)0=1
и б) 0=4.
В обоих случаях (x1x2)<0и в обоих случаях приемник выдает
решение в пользу сигнала S2(t).
Сравнивая случаи принятия решения
решающей схемой приемника при когерентном
и некогерентном приеме, невольно
возникает вопрос: почему получаются
разные результаты в случае а).
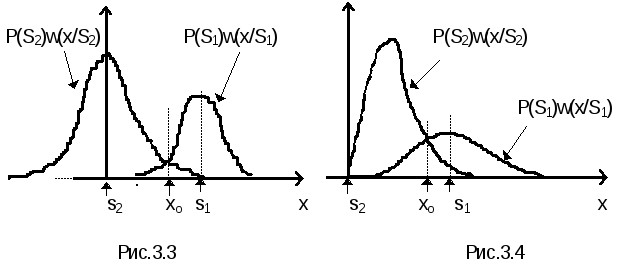
Дело в том, что при когерентном приеме
сигналы x(t)распределены по
гауссовскому закону и оптимальный порогxo, определяемый точкой
пересечения функций P(S1)w(x/s1)иP(S2)w(x/s2)
(рис. 3.3),в этом случае (когдаP(S1)
=P(S2)и0=1)
соответствует половине амплитуды
сигнала S1(t); измеренные
же значения сигналаx(t)близки к
пороговому значению и ближе к сигналу
S1(t). Однако при некогерентном
приеме сигналы x(t)распределены по
законам Релея и оптимальный порогxoзначительно выше, чем половина амплитуды
сигнала S1(t) (рис. 3.4).
Поэтому те же измеренные значенияx(t1)иx(t2)оказываются
дальше от порога в области сигналаS2(t)
и решающая схема приемника при
заданных в условиях задачи вероятностях
сигналовS1(t)иS2(t)выдает решение в пользу сигналаS2(t).
Учитывая, что при когерентном приеме
уровень помех на входе решающей схемы
существенно ниже, чем при некогерентном,
более вероятно, что ошибочное решение
принял некогерентный приемник.
Соседние файлы в папке CHIN
- #
- #
- #
- #
ГЛАВА 2. Обнаружение и различение сигналов
В литературе задача оценки сообщения, принадлежащего дискретному конечному ансамблю, называется обычно «задачей различения m сигналов». Дискретная модель хорошо подходит для описания сообщений в цифровых системах передачи информации, таких, как цифровая телеметрическая система или система передачи дискретных сообщений. Объем ансамбля определяется выбранным методом приема (посимвольным, пословным и т.д.). Число m при пословном приеме равно числу кодовых комбинаций (команд); при посимвольном приеме – основанию кода. В частности, при посимвольном приеме двоичного кода m=2.
Практически работа любой радиосистемы начинается с обнаружения сигнала, при этом по наблюдаемой реализации смеси требуется определить, имеется ли в смеси сигнал или он отсутствует. Если случай отсутствия сигнала можно отождествить с одним значением сообщения х0, а наличия – с другим х1, то задача обнаружения сведется к задаче различения двух значений сообщения и принципиально ничем не будет отличаться от задачи посимвольного приема двоичной информации. Может встретиться ситуация, например, в системе передачи дискретных сообщений, когда на заданном интервале времени может или передаваться сигнал, соответствующий одному из возможных значений сообщения, или ничего не передаваться. Система обработки в этом случае должна вынести решение о том, имеется ли в наблюдаемой смеси сигнал, и если да, то какой именно. В литературе эта задача называется задачей различения m сигналов с обнаружением. Ясно, что и эта задача приводится к общей задачи различения m + 1 сигналов, если в ансамбль сообщений ввести дополнительный («нулевой») сигнал, соответствующий отсутствию сигнала в смеси.
Таким образом, одной из наиболее важных проблем радиообнаружения является отыскание оптимальных способов выделения сигналов при наличии помех. Оптимальными методами обнаружения называются такие, которые обеспечивают наилучшее выделение сигналов из смеси сигнала с помехой.
В результате процесса обнаружения должно быть выдано решение о наличии или отсутствии сигнала в смеси, действующей на входе обнаружителя.
2.1. Обнаружение сигналов как статистическая задача
Пусть на вход обнаружителя поступает сумма сигнала u(t) и шума n(t), представляющая собой непрерывный случайный процесс, x(t) = au(t) + n(t); u(t) – полностью известный сигнал, т.е. такой сигнал, единственным неизвестным параметром которого является сообщение а. В простейшем случае при обнаружении сообщения а может принимать два значения: а = а0 = 0 или а = а1 = 1.
Рекомендуемые материалы
Когда а0 = 0, сигнал на входе обнаружителя отсутствует, когда а1 = 1, сигнал на входе обнаружителя присутствует. Априорные вероятности присутствия и отсутствия сигнала на входе обнаружителя равны Р(а1) и Р(а0) соответственно.
Обнаружитель анализирует колебание x(t) в течение заранее выбранного (конечного) интервала времени Т и должен на основании анализа воспроизвести сообщение а. Функцию x(t), ограниченную во времени Т, будем называть реализацией колебания.
В настоящее время для решения подобных задач широко применяются методы математической статистики. Основной задачей ее является установление законов распределения случайных величин на основе результатов наблюдения над этими величинами.
В случае обнаружения сигналов реализация колебания x(t) является непрерывной функцией времени (при непрерывном или дискретном сигнале u(t) в смеси) с ограниченным спектром.
Представим x(t) выборочными значениями(x1, …,xn), взятыми в соответствии с теоремой Котельникова с интервалом Δt = 1/F, где F – ширина спектра колебания x(t). При этом, объем выборки определится соотношением:
n = T/ΔT = TF (2.1)
На основании анализа выборки x1, …,xn обнаружитель должен оценить параметр а. Очевидно точность оценки зависит от объема выборки при неограниченном времени наблюдения Т. Однако на практике Т ограниченно, а с увеличением объема выборки при Т = const погрешность оценки не устремляется к нулю. Выборка, у которой n → ∞ при Т = const, называется непрерывной.
Поскольку в задачах обнаружения оценка дискретная (а=0 или1), при конечном объеме выборки можно лишь с некоторыми вероятностями высказать статистические гипотезы. Следовательно, решение задачи обнаружения сводится к проверке двух альтернативных (противоположных) статистических гипотез. Гипотеза H1— сигнал во входной смеси есть и гипотеза H0— сигнала нет.
Решение статистической задачи обнаружения сигнала в шуме имеет следующую последовательность:
¨ Выбор и обоснование критериев оптимальности.
¨ Нахождение математического правила решения задачи оптимального обнаружения.
¨ Реализация правила решения с помощью радиотехнических средств (нахождение структурной схемы обнаружителя).
¨ Исследование характеристик оптимального обнаружителя.
¨ Сравнение оптимального и реального обнаружителей.
2.2. Критерии оптимальности обнаружения. Отношение правдоподобия
Критерием оптимальности называется правило, по которому из всех
возможных обнаружителей можно выбрать наилучший.
Пусть сообщение принимает два значения: а0 = 0 и а1 = 1 с априорными вероятностями Р(а0) и Р(а1) соответственно.
В результате наблюдения выборки x1, …,xn должно быть получено одно из двух взаимоисключающих решений: А1 – сигнал есть, А0 — сигнала нет. Каждая возможная выборка представляется в многомерном пространстве одной точкой. Оптимальный обнаружитель должен разделить пространство выборок на два подпространства Х1 и Х0 (соприкасающихся, но непересекающихся) (рис. 2.1.). Если точка М, соответствующая
k-й выборке (x1, …,xn), попадет в подпространство Х1, — принимается решение А1, в противном случае принимается решение А0.
При решении задачи возможны ошибки двух видов – ложные тревоги (с вероятностью Рл) и пропуски сигналов (с вероятностью Рп). Ложные тревоги имеют место в случае, когда в отсутствии сигнала выборка попадает в пространство Х1. Пропуски сигналов имеют место, если при наличии сигнала на входе обнаружителя выборка попадает в Х0.
Из рис. 2.1. следует, что если подпространство Х1 выбрать равным нулю, то Рл = 0, Рп = 1. Если же выбрать равным нулю подпространство Х0, то Рл = 1, Рп = 0. Таким образом, путем изменения границ подпространств Х1 и Х0 можно получить любое соотношение между вероятностями Рл и Рп. Уменьшая Рл, мы тем самым увеличиваем Рп, и наоборот.
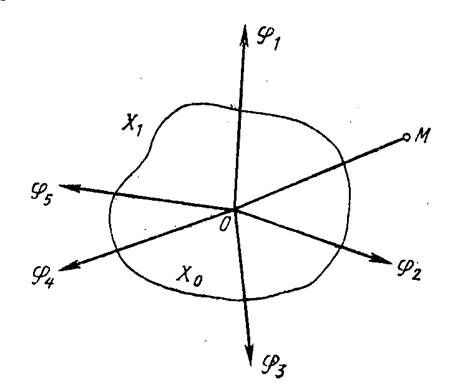
Рис. 2.1. Пространство выборок
Оптимальный обнаружитель должен наилучшим образом по определенному критерию разделить пространство выборок Х на два подпространства: Х1 и Х0. Наиболее распространенными критериями оптимальности обнаружения являются следующие:
1. Критерий минимума среднего риска
 (2.2)
(2.2)
где rл и rп – «весовые» коэффициенты, выбираемые, исходя из значимости каждой ошибки.
Величина  называется средним риском.
называется средним риском.
2. Критерий минимальной «взвешенной» вероятности ошибки
 (2.3)
(2.3)
где a и b – весовые коэффициенты.
3. Критерий минимума вероятности полной ошибки (или критерий
идеального наблюдателя, или критерий Зигерта-Котельникова)
 (2.4)
(2.4)
4. Критерий Неймана – Пирсона

 (2.5)
(2.5)
Величиной Рл задаются, исходя из физической постановки задачи. При этом Рп минимизируют.
Если априорные вероятности Р(а0) и Р(а1) неизвестны, что имеет место во многих случаях, то критерием  пользоваться невозможно. В радиолокации чаще пользуются критерием Неймана – Пирсона.
пользоваться невозможно. В радиолокации чаще пользуются критерием Неймана – Пирсона.
Рассмотрим подробнее критерий минимальной «взвешенной»
вероятности ошибки.
Обозначим отношение  тогда
тогда
 (2.6)
(2.6)
где  (2.7)
(2.7)
 (2.8)
(2.8)
Если при наличии сигнала выборка (х1,…,хn) попадет в область Х1, то имеет место правильное обнаружение. Вероятность правильного обнаружения

 (2.9)
(2.9)
откуда
 (2.10)
(2.10)
Из (2.6), (2.8) и (2.9)
 (2.11)
(2.11)
Следовательно, оптимальный обнаружитель должен обеспечивать максимум интеграла в (2.11)
 (2.12)
(2.12)
Это возможно при положительной подынтегральной разности
 > 0; (2.13)
> 0; (2.13)
т.е.  >
>  . (2.14)
. (2.14)
Таким образом, оптимальный обнаружитель должен вычислять величину
 (2.15)
(2.15)
определяемую отношением функций правдоподобия  и
и  и называемую отношением правдоподобия. Если
и называемую отношением правдоподобия. Если  сравнить с некоторым порогом , то
сравнить с некоторым порогом , то
при > — сигнал есть,
при < — сигнала нет.
Все критерии дают оптимальное решение задачи обнаружения, основанное на вычислении отношения правдоподобия и сравнения его с порогом. Отличаются критерии лишь выбором порога.
Для критерия минимума среднего риска
 (2.16)
(2.16)
Для критерия минимума взвешенной вероятности ошибки
 (2.17)
(2.17)
Для критерия Неймана – Пирсона задается и минимизируется значение Рп.
2.3. Бинарное обнаружение полностью известного сигнала
Положим, что сигнал u(t) известен точно. Сообщение а принимает два значения: а=а0=0 и а=а1=1, с априорными вероятностями Р(а0) и Р(а1) соответственно.
Колебание на входе обнаружителя x(t)=au(t)+n(t), n(t) – нормальный белый шум.
На основании теоремы Котельникова представим колебание x(t) выборкой (х1, …хn) и найдем функцию правдоподобия для выборки в отсутствие сигнала
 (2.18)
(2.18)
Функция правдоподобия для выборки в присутствии сигнала
 (2.19)
(2.19)
В выражениях (2.18) и (2.19) дисперсии равны в силу физической симметрии и определяются соотношением
 (2.20)
(2.20)
где N0 – спектральная мощность шума; F=1/Dt.
Подставим значения s2 в выражения (2.18) и (2.19) и перейдем от суммы к интегралу, устремив  при Т=const. Тогда
при Т=const. Тогда
 (2.21)
(2.21)
 (2.22)
(2.22)
Отношение правдоподобия
 (2.23)
(2.23)
где  — энергия входного сигнала;
— энергия входного сигнала;  — корреляционный интеграл.
— корреляционный интеграл.
Отношение правдоподобия для полностью известного сигнала имеет следующий вид:
 (2.24)
(2.24)
Для вынесения решения необходимо сравнить с порогом ограничения .
Если > — сигнал есть,
Если < — сигнала нет.
Реализовать правило решения (2.24) радиотехническими методами, т.е. построить обнаружитель, который вычислял бы и затем сравнивал с порогом, сложно. Желательно отыскать более простое правило решения.
Поскольку при Е=const зависит только от корреляционного интеграла z(T) и эта зависимость монотонная, то вместо можно установить более простое правило z(T) и сравнивать с порогом z0.
Если z(T) > z0 – сигнал есть,
Если z(T) < z0 — сигнала нет.
Схема оптимального обнаружителя представлена на рис. 2.2 и состоит из перемножителя, интегратора и порогового устройства (ПУ).

Рис. 2.2. Схема оптимального обнаружителя
При вычислении корреляционного интеграла z(T) осуществляются переход от многомерного распределения n выборочных значений напряжения на входе обнаружителя к одномерному распределению напряжения z(T) на его выходе в момент времени Т в результате накопления (суммирования) n выборочных значений в течение длительности выборки Т.
Если входная выборка представляет собой шум n, то zn(T) определяет напряжение шума на выходе коррелятора. Если выборка – смесь сигнала с шумом, то znc(T) можно рассматривать на выходе как аддитивную смесь, поскольку операции суммирования и интегрирования линейные.
Переход от суммы выборочных значений при n→∞ и Т=const к интегралу осуществляется на основании теоремы Котельникова. Напряжение шума на выходе коррелятора
 (2.25)
(2.25)
Напряжение смеси
 (2.26)
(2.26)
Эти напряжения есть максимальные значения отклика коррелятора на шум и смесь соответственно. Превышение порога z0 величиной znc(T) есть правильное обнаружение и вероятность превышения и называется вероятностью правильного обнаружения Р0, а превышение порога z0 величиной zn(T) с вероятностью Рл называется ложной тревогой.
Основными показателями обнаружителя являются рабочие характеристики. Каждая характеристика определяет зависимость Р0, Рл и q2(q2-отношение сигнал/шум). На рис. 2.3 даны качественные характеристики.
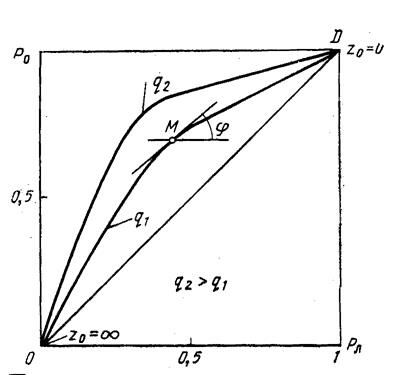
Рис. 2.3. Качественные характеристики обнаружителя.
Из анализа этих характеристик следует:
¨ вероятность правильного обнаружения Р0=0 при вероятности ложной тревоги Рл=0.
¨ чем больше отношение сигнал/шум при заданной вероятности ложной тревоги Рл, тем больше вероятность правильного обнаружения Р0.
¨ Если изменять порог z0 от 0 до ∞, то Р0 и Рл будут изменяться от 1 до 0.
По характеристикам можно определить пороговое отношение
сигнал/шум, которое удовлетворяет заданным вероятностям Р0 и Рл. Найденному значению  и заданной вероятности Рл соответствует точка М. Тангенс угла наклона касательной к рабочей характеристике в точке М определяет необходимую величину порога.
и заданной вероятности Рл соответствует точка М. Тангенс угла наклона касательной к рабочей характеристике в точке М определяет необходимую величину порога.
 . (2.27)
. (2.27)
Для расчета и построения характеристик обнаружения необходимо знать закон распределения отклика коррелятора z(T).
В отсутствии сигнала отклик определяется шумами на входе обнаружителя и может дать ложную тревогу. Величина отклика сравнивается с порогом z0 и вероятностью того, что zn(T) превысит порог z0, называется вероятностью ложной тревоги.
Закон распределения zn(T) будет нормальным с нулевым средним значением. Дисперсия, которая определяет мощность шума на выходе коррелятора:
 . (2.28)
. (2.28)
Сренеквадратичное напряжение шума на выходе коррелятора  Закон распределения отклика коррелятора zn(T) на шум n(t)
Закон распределения отклика коррелятора zn(T) на шум n(t)
 (2.29)
(2.29)
С увеличением порога ограничения z0 вероятность Рл уменьшается. Аналитически вероятность ложной тревоги определяется выражением
 (2.30)
(2.30)
В присутствии на входе обнаружителя отклик коррелятора на смесь сигнала с шумом
 (2.31)
(2.31)
Первый интеграл выражения (2.31) равен Е и определяет амплитуду напряжения на входе коррелятора, которое численно равно энергии входного сигнала и, следовательно, является максимально возможной величиной. Второй интеграл определяет флюктуацию с нулевым средним значением отклика (напряжение шумов) коррелятора.
Случайная величина znс(T) распределена по нормальному закону
 (2.32)
(2.32)
Распределения Wn(z) и Wnc(z) отличаются средними значениями, дисперсии откликов одинаковы.
Вероятность правильного обнаружения вычисляется по формуле
 (2.33)
(2.33)
После преобразований вероятность правильного обнаружения
 (2.34)
(2.34)
Порог ограничения вычисляется в соответствии с выбранным критерием оптимальности.
Зависимость Р0 от q2 при Рл=const называется характеристикой обнаружения. Для различных значений Рл можно построить семейство характеристик обнаружения. Характеристики обнаружения для полностью известного сигнала изображены на рис. 2.4
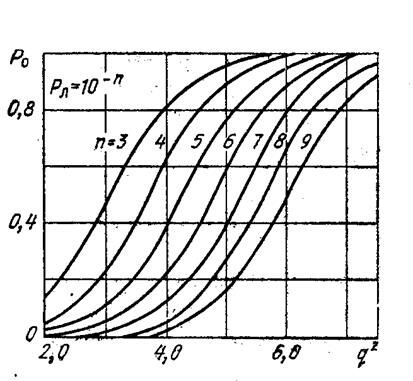
Рис. 2.4. Характеристики обнаружения для полностью известного сигнала
2.4. Обнаружение сигнала со случайной начальной фазой
Рассмотрим задачу обнаружения сигнала, у которой фаза высокочастотного колебания изменяется по случайному закону. Плотность распределения фазы  равномерна в пределах 0….2π. Отношение правдоподобия в этом случае будет еще и функцией фазы β. Энергия сигнала мало зависит от β, поэтому считаем ее постоянной.
равномерна в пределах 0….2π. Отношение правдоподобия в этом случае будет еще и функцией фазы β. Энергия сигнала мало зависит от β, поэтому считаем ее постоянной.
Выражение для корреляционного интеграла через огибающую и фазу запишется в виде:
 (2.35)
(2.35)
где 




 .
.
Отношение правдоподобия для полностью известного сигнала равно:
 (2.36)
(2.36)
которое является случайной функцией β.
Отношение правдоподобия для сигнала со случайной фазой:
 (2.37)
(2.37)
Показатель экспоненты является постоянной величиной, — монотонной функцией Z(T), поэтому оптимальным правилом решения задачи обнаружения сигнала является вычисление корреляционного интеграла Z(T). Затем Z(T) сравнивается с порогом Z0.
Если Z(T) > Z0 – сигнал есть, если Z(T) < Z0 – сигнала нет.
Структурная схема обнаружителя, включающая два квадратурных канала, представлена на рис. 2.5 В каждом канале вычисляется корреляционный интеграл z1 (T) и z2(T) соответственно. В квадратичном детекторе (Кв.Д.) осуществляется операция возведения в квадрат; после вычисления величины  производится сравнение с порогом Z0, который устанавливается в соответствии с выбранным критерием оптимальности.
производится сравнение с порогом Z0, который устанавливается в соответствии с выбранным критерием оптимальности.

Рис. 2.5. Структурная схема обнаружителя
В качестве опорных напряжений на умножителях используются сдвинутые по фазе на π/2 колебания высокой или промежуточной частоты  и
и  В результате отклик Z2 не зависит от случайной фазы сигнала, так как
В результате отклик Z2 не зависит от случайной фазы сигнала, так как 
Вероятность правильного обнаружения равна:
 (2.38)
(2.38)
где  — относительный порог ограничения.
— относительный порог ограничения.
2.5. Бинарное обнаружение сигнала со случайными амплитудой и начальной фазой
Для сигнала  среднеквадритичное значение амплитуды принять равным единице, то выражение для отношения правдоподобия запишется в следующем виде:
среднеквадритичное значение амплитуды принять равным единице, то выражение для отношения правдоподобия запишется в следующем виде:
 (2.39)
(2.39)
Схема оптимального обнаружителя сигнала со случайными амплитудой и начальной фазой не отличается от схемы оптимального обнаружителя сигнала со случайной фазой. По-прежнему оптимальной является квадратурная схема обработки. Изменяется только оптимальный порог, который вычисляется по формуле
 (2.40)
(2.40)
По этой зависимости можно построить характеристики обнаружения
 . (2.41)
. (2.41)
Особенность характеристик обнаружителя со случайными амплитудой и начальной фазой состоит в том, что с ростом q2 вероятность обнаружения увеличивается сначала быстро, после достижения значений q2=0,5…0,6 это увеличение замедляется, а затем становится очень медленным.
Таким образом, характеристики обнаружения для сигнала со случайной начальной фазой сдвигаются в сторону увеличения отношения сигнал/шум, т.е. для обнаружения сигнала требуется большое напряжение его на входе, чем для полностью известного сигнала. Для сигнала со случайной амплитудой и начальной фазой отклик является случайной функцией амплитуды и фазы, поэтому необходимо усреднить отношение правдоподобия и по амплитуде, и по фазе. Характеристики обнаружения сдвигаются еще правее, за исключением участка, где отношение сигнал/шум меньше единицы. Флюктуации амплитуды при q2 < 1 несколько увеличивают вероятность обнаружения.
2.6. Обнаружение сигнала в виде пачки радиоимпульсов
В радиолокации часто применяют сигналы, представляющие собой последовательность из N импульсов, которую для краткости называют пачкой импульсов.
Каждый импульс ui(t) такой пачки полностью характеризуется амплитудой ai, частотой fi, начальной фазой φi, длительностью τi, моментом возникновения ti.
Если зависимость между всеми параметрами импульсов пачки в месте приема полностью известна, то такие импульсы и такая пачка называются когерентными. В противном случае пачка называется некогерентной.
2.6.1. Когерентная пачка импульсов с полностью известными параметрами
Пачка с полностью известными параметрами является частным случаем, полностью известного сигнала и для нее справедливы все расчетные формулы для известного случая. Энергия сигнала u(t):  поэтому для пачки энергия:
поэтому для пачки энергия:  где Еi – энергия i-го импульса.
где Еi – энергия i-го импульса.
Следовательно, все приведенные выше формулы для вероятностей ошибок будут справедливы и для пачки импульсов, если в них понимать под Е энергию всех импульсов пачки, равную сумме энергий всех N импульсов пачки. Если суммарная энергия пачки импульсов такая же, как и у одиночного импульсного сигнала, ошибки обнаружения не изменяются.
Структурная схема обнаружителя для пачки подобна изображенной на рис. 2.2. Однако в этом случае на перемножитель нужно подавать «копию» сигнала в виде пачки радиоимпульсов. Максимальное значение отклика коррелятора будет в момент окончания пачки.
2.6.2. Некогерентная пачка радиоимпульсов с независимыми флюктуациями амплитуды
Сигнал в этом случае запишется так:  Оптимальное правило решения будем искать на основании критерия максимума отношения правдоподобия. Для k-го импульса отношение правдоподобия :
Оптимальное правило решения будем искать на основании критерия максимума отношения правдоподобия. Для k-го импульса отношение правдоподобия :
 (2.42)
(2.42)
При независимых флюктуациях амплитуды импульсов отношение правдоподобия для всего сигнала можно представить в виде произведения отношений правдоподобия для импульсов, тогда:
 (2.43)
(2.43)
После выполнения операции умножения в показателе экспоненты будет сумма откликов на каждый импульс пачки. Поскольку монотонно изменяется с изменением этой суммы, то в этом случае нужно вычислять
 (2.44)
(2.44)
Так же, как и для одиночного импульса, отклик Z(T) будет пропорционален энергии входного сигнала, т.е. энергии пачки импульсов. Результат сравнивают с порогом Z0, выбранным на основании критерия оптимальности. Схема обнаружителя аналогична данной на рис. 2.5. Разница будет состоять в том, что копии сигналов, подаваемых на перемножители, в данном случае представляют собой пачки радиоимпульсов.
2.7. Различение детерминированных сигналов на фоне белого гауссовского шума
Корреляционная функция белого шума со спектральной плотностью N0 равна  После соответствующих преобразований получаем оптимальный аналоговый алгоритм различения сигналов на фоне аддитивного белого гауссовского шума: принимается решение о том, что передан сигнал Sk(t), если
После соответствующих преобразований получаем оптимальный аналоговый алгоритм различения сигналов на фоне аддитивного белого гауссовского шума: принимается решение о том, что передан сигнал Sk(t), если
 (2.45)
(2.45)
где сj определяется по формуле  в которой параметр
в которой параметр  т.е. равен отношению энергии Еj сигнала Sj(t) на интервале наблюдения к спектральной плотности белого шума.
т.е. равен отношению энергии Еj сигнала Sj(t) на интервале наблюдения к спектральной плотности белого шума.
Для ортогональных сигналов : 
2.8. Принцип работы цифровых обнаружителей и различителей сигналов
Оптимальные алгоритмы обнаружения и различения сигналов, как известно, заключаются в накоплении сигнала за длительность входной реализации, сравнении с порогом и измерении параметров сигнала. Реализация алгоритмов в аналоговой форме имеет существенные недостатки:
¨ Аналоговым накопителям свойственно насыщение, в результате которого уменьшается отношение сигнал/шум при накоплении сигналов.
¨ Результаты накопления изменяются в процессе эксплуатации за счет нестабильности элементов динамической памяти.
¨ Нет возможности полной автоматизации процесса обработки сигналов.
¨ Оценка параметров сигналов в процессе обзора сопровождается ошибками, существенно превышающими потенциальные.
Цифровые алгоритмы квазиоптимальны за счет потерь в отношении сигнал/шум при квантовании смеси по амплитуде и дискретизации по времени. Кроме того, реализация алгоритмов в цифровой форме осуществляется на стандартных элементах вычислительной техники, что упрощает конструкции, снижает вес и габариты, увеличивает надежность.
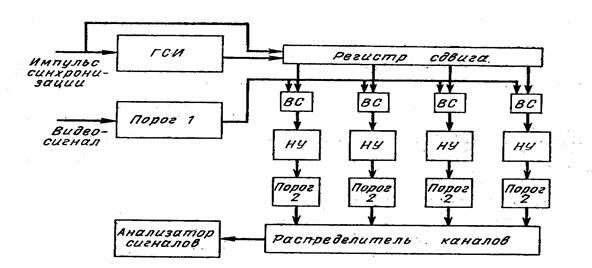
Рис. 2.6. Цифровая схема обнаружения
На рис. 2.6 дана простейшая схема цифровой схемы обнаружения сигналов. Схема включает квантователь по уровню смеси сигнала с шумом (пороговое устройство 1), дискретизатор по времени, выполненный в виде генератора стандартных импульсов (ГСИ), многоканальную схему измерения дальности, включающую регистр сдвига, вентили совпадений (ВС) и накопители сигналов (НУ), распределитель каналов (коммутатор) и анализатор сигналов.
2.9. Дискретизация и квантование непрерывных сигналов
Длительность и период дискретизации выбирают так, чтобы последовательность дискретных значений непрерывного сигнала в течение времени наблюдения позволила восстановить исходный сигнал с заданной точностью.
Вероятность обнаружения смеси Z(t):
 (2.46)
(2.46)
Из этого выражения следует, что с увеличением μ увеличивается вероятность обнаружения сигнала и тем больше, чем меньше исходная вероятность Р01.
Следовательно, увеличение периода квантования приводит к увеличению вероятности обнаружения сигнала, но при этом уменьшается разрешающая способность и точность измерения дальности. Поэтому период квантования Т0 выбирается из условий получения заданной точности измерения при ограниченной сложности измерительного устройства.
Информация в лекции «4 Режущие многогранные пластины» поможет Вам.
Квантование амплитуд сигналов на два уровня означает определение наличия или отсутствия сигнала в дискретном по времени выборочном значении сигнала. На выходе бинарного квантователя появляются 1 и 0 в присутствии сигнала с вероятностью правильного обнаружения
 (2.47)
(2.47)
и пропуска сигнала Рп = 1 – Р0, а в отсутствие сигнала с вероятностью ложной тревоги
 (2.48)
(2.48)
и правильного необнаружения Рн = 1 – Рл. Функции Wnc(Z) и Wn(Z) – распределение смеси сигнала с шумом и шума на выходе детектора огибающей.
После логарифмирования отношения правдоподобия  ) получаем условие оптимального обнаружения квантованной пачки в виде:
) получаем условие оптимального обнаружения квантованной пачки в виде: 
Аннотация
В статье рассмотрены основы статистической обработки сигналов и методы их оптимальной обработки* на фоне шума.
Оптимальная обработка
*Под оптимальной обработкой в радиолокации понимают такую операцию над входной реализацией**, приводящей к повышению вероятности правильно обнаружения полезного сигнала, как правило, известной формы, при условии наличия во входной реализации шума в виде случайного процесса с известным или неизвестным законом распределения.
**Процесс наблюдаемый на входе приёмника. Строго говоря, назвать его «Входной сигнал» нельзя, так как в теории связи «Шум» и «Сигнал» — антонимы.
Введение
Основной задачей радиотехники является приём, передача и обработка информации с использованием в качестве переносчика – радиосигнала. Главное требование, предъявляемое к радиотехническим системам – получение своевременной и достоверной информации от источника к потребителю. Однако этому мешает физика принципов работы приёмопередающих устройств и среды распространения сигнала, суть которой заключается во флюктуации физических параметров системы и случайным значением принимаемого сигнала, имеющего шумовую составляющую, также относящуюся к стохастическим процессам.
На текущий момент, самый эффективный способ различения полезных сигналов на фоне шумов и помех является оптимальная обработка, реализуемая, как правило, сравнением принимаемой входной реализации с априорно известной формой полезного сигнала. При этом шумы, которые по своей природе процесс слабокоррелированный, вносят меньший вклад в величину, показывающую степень этого сравнения и называющуюся коэффициентом корреляции. Таким образом, любая задача обнаружения сводится к проверке минимум двух гипотез. В общем случае задача обнаружения состоит из двух гипотез: H_0 – сигнал отсутствует на входе приёмного устройства, H_1 – сигнал присутствует на входе приёмного устройства. Различные алгоритмы обнаружения обеспечивают различную вероятность правильного обнаружения P{d_1/H_1} при различных прочих статистических параметрах. Для сравнения эффективности алгоритмов обнаружения существуют критерии, а так как обрабатываются вероятностные величины, то характер этих критериев статистический. Иными словами критерий можно определить как мерило сравнения.
Статистические критерии обнаружения
Большая часть алгоритмов обнаружения радиолокационных целей включают в себя следующие этапы:
- Прием входной реализации
- Формирование порога на основе априорной или апостериорной информации.
- Оптимальная фильтрация входной реализации
- Принятие решения о наличии сигнала/цели
При этом очередность приёма входной реализации и формирования порога зависит непосредственно от типа алгоритма. Алгоритмы, формирующие порог на основе апостериорной информации о принятой входной реализации называют адаптивными [1]. Критерий выбирается эмпирически исходя из типа задачи. Например: при выборе места работы обычно рассматривают два критерия:
- Максимума отношения заработанных денег к затраченной силе.
- Максимума удовольствия, получаемого от работы.
К сожалению, современные реалии ставят в приоритет такого специалиста, навыки которого позволяли бы как можно быстрее выпустить продукцию и максимизировать прибыль компании. И зачастую второй критерий либо отбрасывается, либо при анализе ситуации ему присваивается низкий приоритет. Показатель, в данном случае, определяющий приоритет критериев, называется его мощностью.
В математической статистике мощность критерия определяется, как вероятность не совершить ошибку второго рода при принятии решения. В нашем случае ошибка второго рода — это не устроится на оптимальную для себя работу, в общем же случае это ложное принятие за истину события соответствующего гипотезе H_0.
Разумеется, универсальных критериев не существует. Так, например, критерий, имеющий наибольшую мощность, в решении одной задачи, в решении другой может оказаться наихудшим по этому показателю.
Критерий минимального среднего риска (критерий Байеса)

Рис.1 График распределения условной плотности вероятности наличия W(U|A=1) и отсутствия W(U|A=0) с вероятностями ошибок
Пусть A = 1 соответствует наличию сигнала s(t), а A = 0 – его отсутствию. Множество решений d вырождается в два: d_0 →A=1 and d_1→A=0.
При решении задачи бинарного обнаружения задача эквивалентна проверке гипотезы H_1 о том, что А = 1, при альтернативной гипотезе H_0 о том, что А = 0, а функция потерь переходит в квадратную матрицу:
Таким образом, условный риск при A = 0 равен r_0= C_00 P{d_0/H_0 }+ C_01 P{d_1/H_0 }=C_00 (1-P{d_1/H_0 })+ C_01 P{d_1/H_0 }, а при A = 1 равен r_1= C_10 P{d_0/H_1 }+ C_11 P{d_1/H_1}=C_10 (1-P{d_1/H_1} )+C_11 P{d_1/H_1}, где P{d_1/H_1} – вероятность правильного обнаружения, а P{d_1/H_0 } – вероятность ложной тревоги.
Средний риск определяется как r ̅=qr_0+pr_1, где q – априорная вероятность отсутствия сигнала, а p – априорная вероятность присутствия сигнала и определяет средние потери при ложной тревоге и пропуске цели [2]. Например: при использовании такого критерия для выставления порога срабатывания пожарной сигнализации, стоимость риска при ложной тревоге – вызов пожарной службы, а при пропуске – стоимость вещей в сгоревшей квартире или офисе.
На рис.1 проиллюстрированы графики распределения плотности вероятности при наличии и отсутствии сигнала, также выделены зоны, площадь которых численно равна вероятностям ошибок при принятии решения. Ввиду стохастической природы явлений рассматриваемых в данном примере, распределения имеют ненулевую дисперсию. Согласно критерию минимального среднего риска лучшим алгоритмом обнаружения сигнала будет тот, у которого величина r ̅ будет минимальна [2].
Критерий максимума апостериорной вероятности (максимального правдоподобия)
Этот критерий получается из критерия минимального среднего риска при условии, что потери при совершении ошибки обратно пропорциональны вероятности их совершения C_01=1/P{d_0}, C_10=1/P{d_1}. При этом порог оптимального обнаружителя выставляется таким образом, чтобы минимизировать сумму вероятностей ошибок P_ош=P{d_0/H_1 }+P{d_1/H_0 } (см рис.2).
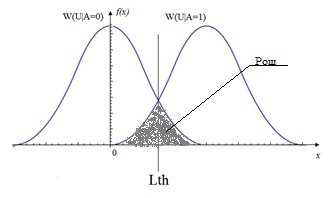
Рис.2 График распределения условной плотности вероятности наличия W(U|A=1) и отсутствия W(U|A=0) с вероятностью ошибки
Двухпороговый критерий Вальда
В случаях, когда большую роль играет время наблюдения за процессом, например при наличии нескольких каналов и одного обнаружителя или круговом обзоре РЛС, применяют критерий последовательной проверки гипотез Вальда также известный под названием двухпороговый.
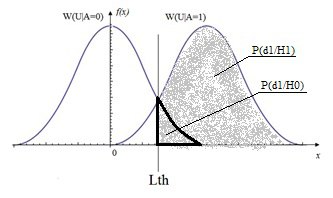
Рис.3 График распределения условной плотности вероятности наличия W(U|A=1) и отсутствия W(U|A=0) с вероятностью правильного обнаружения и вероятностью ложной тревоги
По этому критерию область определения вероятности делится на три подобласти, разделяемыми двумя порогами, определяемыми вероятностями правильного обнаружения и ложной тревоги (см.рис 3): 
Критерий Вальда является оптимальным в смысле минимизации среднего времени наблюдения по большому количеству экспериментов [4]. Так как наиболее предпочтительным для радиолокации является сокращение длительности процедуры обнаружения, современные реалии ведут к всё более активному использованию этого критерия [5].
Критерий Неймана-Пирсона
Большим минусом критериев Байесовского класса является необходимость априорного знания элементов матрицы потерь. Например: при пропуске вражеского бомбардировщика на союзную территорию стоимость рисков не поддается исчислению.
В критерии Неймана-Пирсона фиксируется время обнаружения. Оптимальным будет алгоритм с максимальной вероятностью правильного обнаружения P{d_1/H_1 }, при условии, что вероятность ложной тревоги P{d_1/H_0 } не превышает заданной величины [6].
В виду того, что критерий Неймана-Пирсона не требует знания априорных вероятностей ситуаций A = 1 и A = 0, в радиолокации его используют одним из основных [5].
Заключение
При разработке обнаружителей очень важно осознанно выбирать критерий оптимальности, ведь, как уже упоминалось ранее, каждый критерий имеет максимальную мощность в какой-либо определенной ситуации и применение иных может привести к нежелательным последствиям.
Список использованных источников:
[1] Bulyakulov R.R. The adaptive threshold device // Processing of the 2014 IEEE North West Russia Section Young Researches in Electrical and Electronic Engineering Conference. P.165.
doi: 10.1109/EIConRusNW.2016.7448237
[2] Бакулев, П.А. Радиолокационные системы. Учебник для ВУЗов / П.А. Бакулев; М.: Радиотехника, 2004. – 46 с.
[3] Юревич, Е.И. Теория автоматического управления / Е.И. Юревич; М.: Энергия, 1969
[4] Богатырев, А.А. Стандартизация статистических методов управления качеством / А. А. Богатырев, Ю. Д. Филиппов; М.: Изд-во стандартов, 1989. – 42 с.
[5] Храменков, А.С. Сопоставительный анализ радиолокационных обнаружителей, основанных на критерии неймана-пирсона и последовательном критерии отношения вероятностей /А.С. Храменков, С.Н. Ярмолик // доклады БГУИР №6(76) Минск, 2013.
[6] Васильев, К.К. Методы обработки сигналов: Учебное пособие / К.К. Васильев; Ульяновск, 2001.