- yaw error
-
путевая ошибка, ошибка по рысканию
Englsh-Russian aviation and space dictionary. — M.: Military publishing house USSR Ministry of Defence.
.
1974.
Смотреть что такое «yaw error» в других словарях:
-
Yaw drive — The yaw drive is an important component in horizontal axis wind turbines. To ensure the wind turbine is producing the maximal amount of electrical energy at all times, the yaw drive is used to keep the rotor facing into the wind as the wind… … Wikipedia
-
YEA — YES vote (Governmental » Military) YES vote (Governmental » US Government) YES vote (Governmental » United Nations) * Young Entrepreneurs Asia (Business » Firms) * Youth Educational Adventures (Community » Educational) * Yaw Error Amplifier… … Abbreviations dictionary
-
Wright brothers — Orville Wright Photo: 1903 Born August 19 … Wikipedia
-
PID controller — A block diagram of a PID controller A proportional–integral–derivative controller (PID controller) is a generic control loop feedback mechanism (controller) widely used in industrial control systems – a PID is the most commonly used feedback… … Wikipedia
-
Mariner 1 — Launch of Mariner 1 Mariner 1 was the first spacecraft of the American Mariner program. Launched on July 22, 1962 as a Venus flyby mission, a range safety officer ordered its destructive abort at 09:26:16 UT, 294.5 seconds after launch.[1]… … Wikipedia
-
Motion simulator — Simulator seating St. Louis Zoo A motion simulator or motion platform is a mechanism that encapsulates occupants and creates the effect/feelings of being in a moving vehicle. Motion simulators fall into two categories (described below) based on… … Wikipedia
-
Control reversal — is an adverse effect on the controllability of aircraft. The flight controls reverse themselves in a way that is not intuitive, so pilots may not be aware of the situation and therefore provide the wrong inputs; in order to roll to the left, for… … Wikipedia
-
Radio-controlled aircraft — A radio controlled aircraft (often called RC aircraft or RC plane) is a model aircraft that is controlled remotely, typically with a hand held transmitter and a receiver within the craft. The receiver controls the corresponding servos that move… … Wikipedia
-
Aircraft dynamic modes — Source: Flight dynamicsThe dynamic stability of a vehicle denotes the complete study of the motion occurring after the vehicle has been disturbed. If the aircraft returns to equilibrium without overshoot, the motion is a simple subsidence. If the … Wikipedia
-
Gustafson v. Payless — Infobox Court Case name = Gustafson v. Payless Drug Stores court = Oregon Supreme Court date filed = December 3 1973 date decided = August 8 1974 full name = Albertina Gustafson v. Payless Drug Stores NW, Inc. citations = 269 Or. 354, 525 P.2d… … Wikipedia
-
Compass — This article is about the direction finding instrument used in navigation. For other uses, see Compass (disambiguation). A simple dry magnetic pocket compass … Wikipedia

#1
![]()
OFFLINE
astepanov
-

- Пользователи
-
- 7 сообщений
Начинающий летчик


- Город:Saratov
- Коптер:Mavic Pro
Отправлено 18 Сентябрь 2018 — 02:55
Коллеги, выручайте. Пытаюсь проанализировать сложившуюся сегодня ситуацию, которая привела к падению квадрокоптера.
Взлетал с крыши крытой парковки. Предполагаю, что там мог быть металл, но при взлете никаких сообщений о сильном магнитном поле или требования провести калибровку компаса не было. Взлетел, начал набирать высоту, на 15 секунде квадрокоптер переходит в Atti режим из-за ошибки компаса, его начинает крутить вокруг своей оси и сносить в сторону. Всеми силами пытаюсь его стабилизировать, задираю вверх. Рядом горы, стабилизировать не удается, так как продолжается вращение. В какой-то момент я дергаю стики вниз, чтобы заглушить двигатели, он падает (возможно, заглушить их не удалось и он просто врезался в гору продолжая вращение, сложно сказать, так как последние 3-5 секунд полета я потерял его из виду).
Удалось найти его с трудом, так как GPS координаты остались показывать точку рядом со взлетом, хотя падение произошло в горах. К моему огромному удивлению падение прошло успешно. Было много ошибок после падения, но после перезапуска они все ушли, смог запустить моторы, взлетать буду пробовать завтра после полной калибровки всей электроники.
Вопрос к знатокам понять, в чем же была причина. Пока грешу на сильные магнитные поля в зоне взлета, которые привели к ошибке компаса, отключению GPS режима. Но я ожидал, что в Atti режиме квадрокоптер останется управляем, а получилось, что он начал крутиться вокруг своей оси со смещением. Ветра не было, уровень сигнала GPS хороший на протяжении всего полета.
Я выкачал все логи, которые смог найти (DAT файл полета, лог в пульта, лог с DJI Go 4). Все выложил в папку на Google Drive. Плюс привожу ссылку на AirData с логом полета.
Буду благодарен любой помощи в разборе ситуации.
-
0
#2
![]()
OFFLINE
Parcifall
Parcifall
- Город:Moscow
- Коптер:Mavic air/pro
Отправлено 18 Сентябрь 2018 — 07:48
Парковаться из жбк,
Странно что не ругался до взлёта.
До этого летали далеко от этого места?
По хорошему при отдалении на 50 км от предыдущего места старта надо калибровку компаса делать.
-
0
#3
![]()
OFFLINE
DozorSPb
DozorSPb
- Город:Санкт-Петербург
- Коптер:Mavic Pro / Spark / Diatone M530 / Walkera Runner
Отправлено 18 Сентябрь 2018 — 08:47
astepanov,У Вас батарейка умирает — это раз.
С чем связана критическая ошибка компаса — трудно сказать. По хорошему — нужно нести в сервис. Пусть размагничивают, калибруют, в конце концов меняют компас.
Сообщение отредактировал DozorSPb: 18 Сентябрь 2018 — 08:47
-
1
#4
![]()
OFFLINE
MROzio
MROzio
-
- Пользователи
-
- 40 сообщений
Начинающий летчик
- Город:Москва
- Коптер:Mavic pro
Отправлено 18 Сентябрь 2018 — 09:01
По хорошему при отдалении на 50 км от предыдущего места старта надо калибровку компаса делать.
Это как так? я где только не был, и за 1000 км от крайнего места старта взлетал, и такой фигни не было. Калибровать надо только тогда, когда он об этом просит.
-
0
#5
![]()
OFFLINE
astepanov
astepanov
-
- Пользователи
-
- 7 сообщений
Начинающий летчик
- Город:Saratov
- Коптер:Mavic Pro
Отправлено 18 Сентябрь 2018 — 10:46
DozorSPb
, а по каким данным Вы это определили? по увеличенному Deviation после падения? Видимо это результат удара, надо понаблюдать, пока смог зарядить ее на 100%, статус батареи OK.
Калибровку не проводил, делал ее всегда только по требованию, проблем не было. До этого летал 20 км от этого места. Но это были горы, возможно реально неудачная точка взлета была.
— compass error может быть еще от чего-то или это результат внешнего магнитного поля?
— как защитить себя на будущее? проверять значения от компасов при взлете?
-
0
#6
![]()
OFFLINE
Parcifall
Parcifall
- Город:Moscow
- Коптер:Mavic air/pro
Отправлено 18 Сентябрь 2018 — 12:04
У меня так написано в инструкции по мавик air.. если не путаю, он сам просит.
И калибровку лучше делать самому. Да, я сам ее никогда не делаю без нужды, но в условиях города и жбк конструкций надо себя заставить.
-
0
#7
![]()
OFFLINE
SergKap
Отправлено 18 Сентябрь 2018 — 12:39
Буду благодарен любой помощи в разборе ситуации.
Сразу после взлёта на 3-ей секунде и высоте всего 0,6 м. вы получили сигнал об ошибке компаса. Вместо немедленной реакции на посадку, вы начали продолжать поднимать дрон левым стиком несмотря на продолжающиеся непрерывные сигналы об ошибке компаса. Странное поведение пилота.
-
2
#8
![]()
OFFLINE
MROzio
MROzio
-
- Пользователи
-
- 40 сообщений
Начинающий летчик
- Город:Москва
- Коптер:Mavic pro
Отправлено 18 Сентябрь 2018 — 12:49
У меня так написано в инструкции по мавик air.. если не путаю, он сам просит.
То эир, тут разговор про mavic, у меня просил только один раз, и то когда я пытался взлететь с ЖБИ плиты, потом ушел с нее и все встало на свои места.
-
0
#9
![]()
OFFLINE
astepanov
astepanov
-
- Пользователи
-
- 7 сообщений
Начинающий летчик
- Город:Saratov
- Коптер:Mavic Pro
Отправлено 18 Сентябрь 2018 — 07:46
SergKap, не совсем так. Ошибка компаса видна сразу в логах. А в приложении она появилась только на 15 секунде на высоте 30 метров. Когда его начало крутить, пришлось экстренно набирать высоту и пытаться спасти.
-
0
#10
![]()
OFFLINE
SergKap
Отправлено 18 Сентябрь 2018 — 08:18
на 15 секунде на высоте 30 метров
Что-то путаете На 15 сек дрон был не на 30-ти, а на 71 м. Куда вы его загоняли при сигналах ошибки компаса. И именно здесь усугубился переходом в Аtti
У вас было целых 12 секунд, чтобы осмыслить ситуацию и адекватно среагировать.
Впрочем, Аирдата может и врать. Наверное, живёт своей жизнью и её данные с сообщениями на пульте никак не связаны 
Вам виднее. Типичная ошибка, когда неопытный илот смотрит на дрон в момент взлёта и не реагирует, что где-то что-то пищит. Летит же ведь !
Сообщение отредактировал SergKap: 18 Сентябрь 2018 — 08:22
-
0
#11
![]()
OFFLINE
astepanov
astepanov
-
- Пользователи
-
- 7 сообщений
Начинающий летчик
- Город:Saratov
- Коптер:Mavic Pro
Отправлено 18 Сентябрь 2018 — 08:29
SergKap, высоту 30 увидел в Flight Record в DJI Go приложении. Сути не меняет. Шел взлет, я набирал высоту. На 15 секунде он перешел в Atti режим и понеслось. Мои ожидания были, что в Atti режиме он будет управляем. Сейчас пытаюсь понять, что влияло на его вращение вокруг своей оси и движение в сторону. Ветер был слабый, это был не дрейф.
Еще раз повторюсь, сигнал ошибки компаса на RC возник только на 15 секунде полета, это и в логе видно. Первые 15 секунд он адекватно управлялся по GPS, никакой ошибки не было. А вот с переходом в Atti началось непонятное.
Сообщение отредактировал astepanov: 18 Сентябрь 2018 — 08:30
-
0
#12
![]()
OFFLINE
DozorSPb
DozorSPb
- Город:Санкт-Петербург
- Коптер:Mavic Pro / Spark / Diatone M530 / Walkera Runner
Отправлено 18 Сентябрь 2018 — 08:51
Мои ожидания были, что в Atti режиме он будет управляем.
Да, управляем. Но только в том случае, если рабочий компас.
Добавлено позже (18 Сентябрь 2018 — 20:51)
astepanov,Отравьте логи джидайцам. Пусть допиливают 4.3.0 до ума
-
1
#13
![]()
OFFLINE
SergKap
Отправлено 18 Сентябрь 2018 — 08:58
2 странности увидел в части оценки на возможность гарантийного случая
а) почему вдруг на 16 сек. и высоте 79 м. вдруг выскочил сигнал о магнитной интерференции ?
б) почему при устойчивой GPS связи на 15 сек. дрон перешёл в Atti режим ?
-
1
#14
![]()
OFFLINE
astepanov
astepanov
-
- Пользователи
-
- 7 сообщений
Начинающий летчик
- Город:Saratov
- Коптер:Mavic Pro
Отправлено 18 Сентябрь 2018 — 09:10
DozorSPb
, спасибо, теперь все встало на свои места
SergKap, согласен, выглядит очень странно, ошибка компаса была почти сразу, почему он не вывел сообщение раньше. Переход дрона в Atti мод еще одна загадка.
Дрон покупал на официальном сайте DJI в штатах, привозили друзья. Логи отправлю, конечно, пусть работают над багами, если это по их вине. Дрон только поцарапал брюхо, что просто чудо при бесконтрольной посадке в гору с крупными камнями. Ожидать от них компенсации при рабочем дроне, видимо бесполезно. Да и отправлять его в штаты для диагностики и вынесения их вердикта, тоже смысла нет.
-
0
#15
![]()
OFFLINE
DozorSPb
DozorSPb
- Город:Санкт-Петербург
- Коптер:Mavic Pro / Spark / Diatone M530 / Walkera Runner
Отправлено 18 Сентябрь 2018 — 10:33
Ожидать от них компенсации при рабочем дроне, видимо бесполезно.
Вопрос в том, рабочий ли он. У меня тоже один раз была критическая ошибка компаса с переходом в ATTI — Да, дрон колбалосило, но он вокруг оси не вращался.
А судя по этой «синусоиде» скорости его вращало вокруг оси до последнего

и да, со спутниками все было в норме. Просто начиная с 14 секунды дрон на их присутствие не реагировал

так что запускать его нужно с осторожностью. Как бы опять не улетел
-
1
#16
![]()
OFFLINE
astepanov
astepanov
-
- Пользователи
-
- 7 сообщений
Начинающий летчик
- Город:Saratov
- Коптер:Mavic Pro
Отправлено 19 Сентябрь 2018 — 12:47
так что запускать его нужно с осторожностью. Как бы опять не улетел
Спасибо за детальный анализ. Завтра после полной калибровки всех компонентов буду пробовать запустить в поле. Как на зло середина путешествия, будет обидно, если птицу только в ремонт. Может попробую найти официальный сервисный в Австрии или Германии, правда никто там по гарантии ремонт делать не будет, она же у DJI не международная 
-
0
#17
![]()
OFFLINE
Parcifall
Parcifall
- Город:Moscow
- Коптер:Mavic air/pro
Отправлено 19 Сентябрь 2018 — 01:59
У мавика про я часто виде переход в атти и обратно по несколько раз в секунду, и видно это только в логах, на управлении не сказывается и gps устойчивый.
-
0
#18
![]()
OFFLINE
olegnsk
olegnsk
-
- Модераторы
-
- 7 702 сообщений
Опытный летчик АС

- Город:Москва, исторически Новосибирск и Камчатка
- Коптер:младшенький Mavic и ещё небольшая эскадрилья
Отправлено 19 Сентябрь 2018 — 05:38
Просто начиная с 14 секунды дрон на их присутствие не реагировал
При ошибке компаса коптер по своему алгоритму на автомате переходит в ATTI и кол-во спутников уже не волнует.
-
0
#19
![]()
OFFLINE
SergKap
Отправлено 19 Сентябрь 2018 — 06:55
olegnsk,
О переходе в Атти можно только догадываться.
На этом видео, например, не увидел ни одного сигнала о переходе в Атти. Только «ошибка компаса», «слабый сигнал GPS» и «невозможность записи точки дом».
Не знаю, возможно есть записи в логах.
И полагаю, что не всякая ошибка компаса приводит к переходу в «слабый сигнал GPS».
Кстати, как я понял пилот говорит, что его устойчивое положение на этой высоте только за счёт системы нижнего позиционирования. Интересный ролик.
-
0
#20
![]()
OFFLINE
astepanov
astepanov
-
- Пользователи
-
- 7 сообщений
Начинающий летчик
- Город:Saratov
- Коптер:Mavic Pro
Отправлено 19 Сентябрь 2018 — 09:41
На этом видео, например, не увидел ни одного сигнала о переходе в Атти. Только «ошибка компаса», «слабый сигнал GPS» и «невозможность записи точки дом».
Тоже видел это видео, что еще больше меня смутило. Но в моем случае был переход в Атти, что и привело к таким последствиям.
Провел сегодня тестовый полет после калибровки компаса. Пока ведет себя адекватно, потери спутников не было, ошибок компаса тоже. Несмотря на встречу со горой все функции работают. Надеюсь новых проблем не появится. Всем огромное спасибо за помощь в разборе ситуации. В будущем решил перед каждым запуском проверять статус компаса, думаю он бы и в этой ситуации показал сильную интерференцию. Странно только, что никакой ошибки не вышло до взлета.
-
0

Автомобиль Toyota Avensis 2004 года выпуска приехал к нам с горящими лампочками VSC и TRC OFF (фото 1). Постоянное свечение этих индикаторов говорит о том, что в электронной системе управления тормозами имеется неисправность. На данном автомобиле тормозная система выполняет не только функции АБС, но еще и функции стабилизации курсовой устойчивости (СКС). По «тойотовской» терминологии данная система называется Vehicle Stability Control, или сокращенно VSC.

Трудности перевода

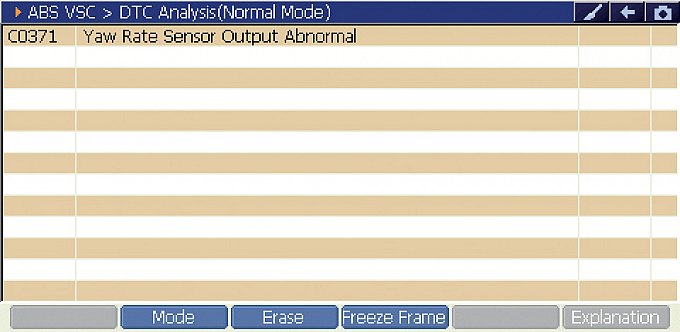
Подключаем к диагностическому разъему сканер G-Scan и устанавливаем связь с блоком VSC. Считывание кодов неисправностей дает следующий результат: С0371 Yaw Rate Sensor Output Abnormal. Попытки стереть данный код ни к чему не приводят, т.е. неисправность жесткая. Если попытаться перевести описание кода на русский язык, то получится следующее: «неправильный сигнал датчика рыскания». Звучит не очень благозвучно, хотя, конечно, понять, о чем идет речь, можно. На мой взгляд, более удачный вариант перевода приводится в технической базе данных Мотордата от компании «Легион». Там Yaw Sensor называется многокоординатным датчиком ускорения. Может быть, немного громоздко, но смысл передается более точно. Yaw sensor используется системой курсовой устойчивости для отслеживания ускорения и замедления автомобиля в продольной и поперечной плоскостях. Кроме этого, он информирует блок VSC о степени поворота автомобиля вокруг своей оси. Так что называть этот датчик «многокоординатным» вполне уместно.

Существует два варианта установки Yaw-датчика. На части автомобилей он встроен в блок управления АБС/СКС, т.е. является интегрированным в схему ЭБУ. На других авто этот датчик является отдельным устройством, устанавливается отдельно от блока управления и связан с ним посредством высокоскоростной CAN-шины. Такая идеология позволяет разместить данный датчик максимально близко к центру кузова автомобиля, что необходимо для точной и корректной работы всей системы. Именно с таким вариантом мы и имеем дело в нашем случае. Датчик установлен под сиденьем водителя, и не просто под сиденьем, он максимально смещен вправо, к оси продольной оси симметрии кузова (фото 2). К датчику подходят всего четыре провода, два из которых – это масса и 12-вольтовое питание. Оставшиеся два провода являются шинами высокого (High) и низкого (Low) уровней высокоскоростной CAN-шины.

Шаг за шагом
Поскольку подменного датчика у нас нет, проверять проводку придется однозначно. Как известно, если датчик не получает питания, работать он не будет. Поэтому первым делом проверяем наличие напряжения между массовым и питающим выводом разъема датчика при включенном зажигании. Напряжение имеется. Идем дальше – измеряем напряжение на проводах Hi и Low CAN-шины относительно массы. Как следует из фото 3 и 4, и здесь нет никаких отклонений. Как и положено, на обоих проводах имеются почти одинаковые потенциалы, примерно по 2,5 В. Таким образом, к целостности ни одного из четырех проводов, подходящих к датчику, претензий нет, а CAN-контроллеры всех участников шины не искажают заданные потенциалы.

Что еще может повлиять на сигнал датчика? Наличие помех или отражений в CAN-шине. Это возможно, если есть какие-либо проблемы с нагрузочными резисторами шины. Проверим. Выключаем зажигание, подключаем датчик и, подсоединив измерительные провода мультиметра с тыльной стороны его разъема, измеряем сопротивление между выводами High и Low. Оно составляет 60 Ом (фото 5). То есть оба нагрузочных резистора шины в норме, ну и проводку еще раз проверили, лишний раз убедившись, что все OK. Ну а раз все компоненты в порядке, неисправным, очевидно, остается считать собственно сам датчик. Сообщаем эту «радостную» новость владельцу автомобиля. Он согласен на замену датчика, но с одной оговоркой – заказывать его он будет сам.

Германия vs Венгрия

Проходит примерно месяц, и клиент, наконец, появляется у нас с новым датчиком. Датчик действительно оригинальный, «бошевский» (фото 7). Именно такой и был установлен, только произведен он был, в отличие от нового, не в Венгрии, а в Германии. Кстати, точно такие же датчики используются и на многих других автомобилях, производимых в Европе, например на Land Rover. Устанавливаем датчик на место, включаем зажигание, удаляем ошибки (экран 2). Запускаем двигатель – индикаторы VSC и TRC OFF больше не горят. Но это еще не финал. Для того чтобы система работала корректно, необходимо произвести калибровку системы VSC.
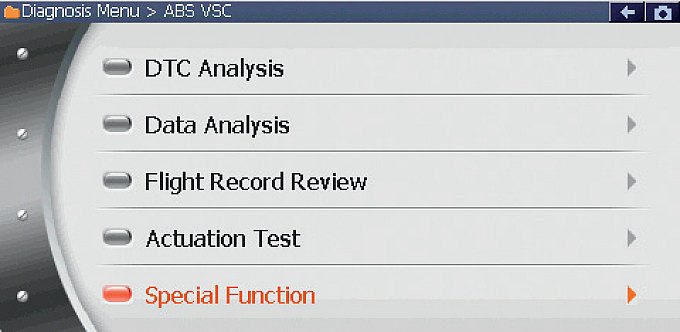
Для выполнения этой процедуры в функциональном меню необходимо выбрать раздел «Special function» (экран 3).
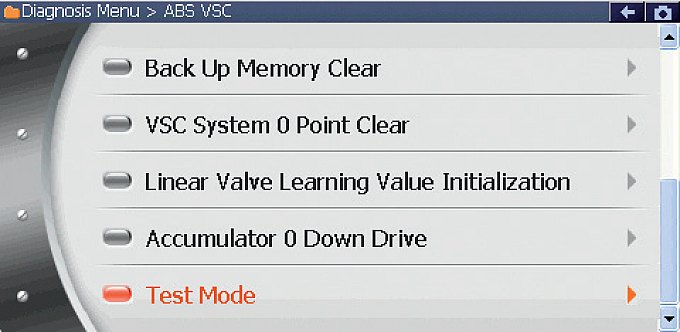
Откроется меню, в котором нужно выбрать не позицию «VSC System 0 Point Clear», как можно было бы предположить, а строку «Test Mode» (экран 4).
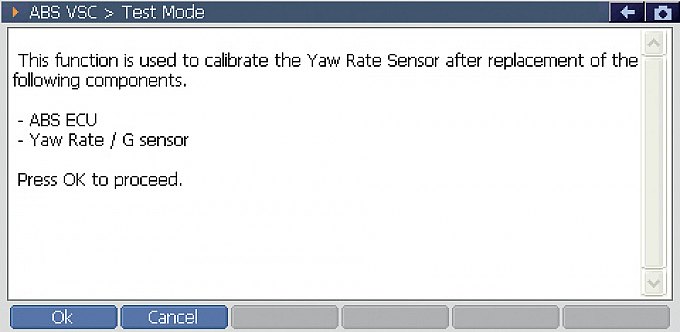
После нажатия клавиши Enter появляется экран 5, где выводится информация о назначении данного режима. Как следует из описания на экране, режим «Test Mode» используется для калибровки датчика ускорений после его замены или замены блока VSC.
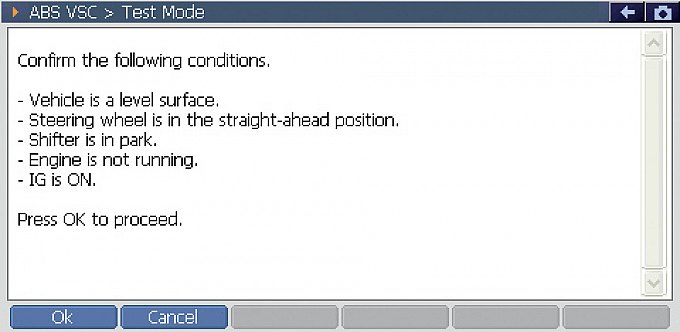
Так что это именно то, что нам нужно. Нажимаем на экранную клавишу «ОК», появляется экран 6, где описаны условия проведения процедуры: автомобиль должен находиться на ровной горизонтальной поверхности, руль в положении «прямо», рычаг АКП в положении «паркинг», двигатель выключен, зажигание включено.
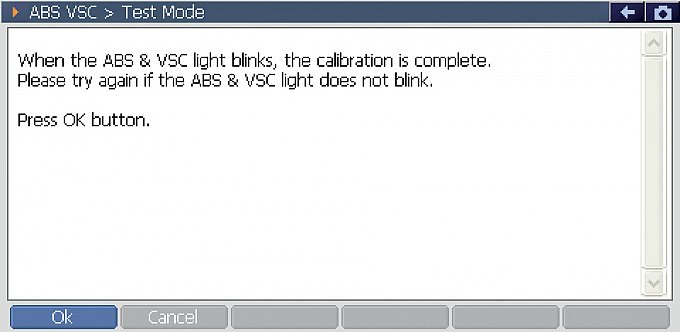
Опять нажимаем клавишу «ОК», запускается процесс калибровки, а на дисплее сканера появляется сообщение о том, что признаком корректного окончания калибровки является мигание индикаторов ABS и VSC. Индикаторы действительно мигают, так что процедура успешно завершена. Останавливаем коммуникацию, выключаем зажигание, отсоединяем сканер. Вот теперь действительно всё.
/Экран 6/
/Экран 7/